一种永磁同步电机转子位置和转速的评估系统及方法与流程
- 国知局
- 2024-12-06 12:12:01
本发明属于永磁同步电机,具体涉及一种永磁同步电机转子位置和转速的评估系统及方法。
背景技术:
1、目前,永磁同步电机普遍应用旋转变压器采集转子位置信息,进而计算转子转速。但是,当电机运行在高温、潮湿、多尘、电磁干扰较大的工况时,旋转变压器采集的信号就会失真,进而使转子位置和转速评估精度降低,导致转矩输出精度降低,客户驾驶体验变差。
技术实现思路
1、本发明的目的就在于提供一种永磁同步电机转子位置和转速的评估系统,还提供一种永磁同步电机转子位置和转速的评估方法,以解决电机运行在高温、潮湿、多尘以及电磁干扰较大的工况时,旋转变压器采集的信号失真的问题。
2、本发明的目的是通过以下技术方案实现的:
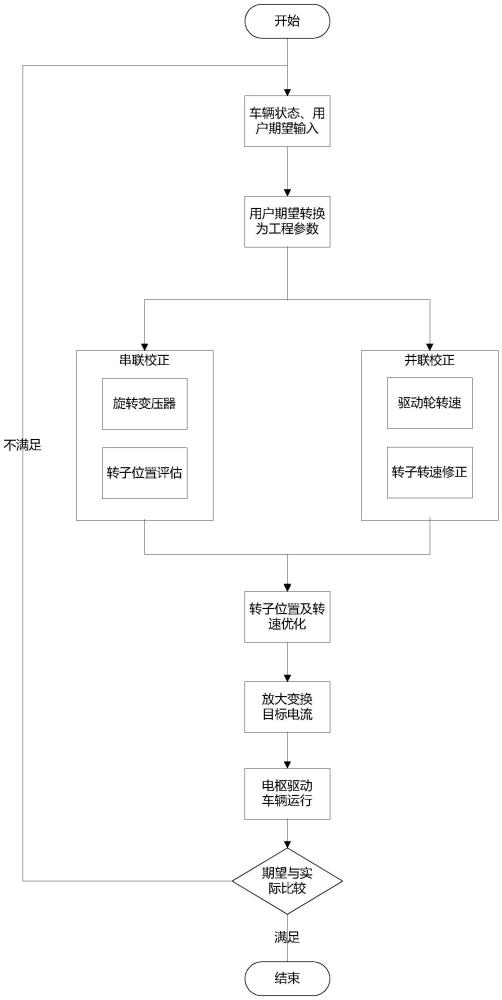
3、一种永磁同步电机转子位置和转速的评估系统,包括反馈装置、串联校正装置、并联校正装置、放大变换装置和执行装置,能够输入用户期望值,使用反馈装置,获取整车及环境信息,计算用户期望值和车辆返回值之间的差值,采用校正装置评估转子位置及转速,采用放大变换装置计算并输出电机控制指令,实现车辆转矩控制;
4、其中,所述反馈装置用于进行包括电机定子电流、电机温度、转子位置以及驱动轮转速的状态采集;所述串联校正装置,应用旋转变压器计算电机转子位置及转速;所述并联校正装置,应用驱动轮转速辅助计算电机转子位置及转速;所述放大变换装置,利用目标转矩、转子位置、电感以及磁链参数,计算dq参考坐标系下的目标电流id、iq;所述执行装置,包括安装在车辆上的电机、减速器、驱动桥和驱动轮。
5、进一步地,所述用户期望值为表示车辆加减速过程中的目标转矩、驾驶性参数。
6、进一步地,所述车辆进行扰动设置,所述扰动指环境扰动和车辆扰动,包括温度、灰尘、湿度、电磁干扰以及道路平整度。
7、一种永磁同步电机转子位置和转速的评估方法,基于状态变量、输入变量、观测变量,得出状态方程、观测方程,基于扩展卡尔曼滤波器算法对转子位置和转速进行评,包括以下步骤:
8、a、将采集到的车辆的电机定子电流、电机温度、转子位置以及驱动轮转速状态以及用户期望值输入,将用户期望转换为工程参数;
9、b、串联校正,应用旋转变压器计算电机转子位置及转速,建立转子位置和转速评估数学模型:
10、c、串联校正,应用卡尔曼滤波器,实现转子位置和转速评估预测与更新;
11、d、并联校正,综合考虑驱动轮转速传感器、旋转变压器信号,计算转子位置及转速最优估计值。
12、进一步地,步骤b,具体包括以下步骤:
13、b1、永磁同步电机电压方程如公式(1)所示:
14、
15、式中,ud表示d轴电压,uq表示q轴电压,rs表示定子绕组电阻,id表示d轴电流,iq表示q轴电流,p表示微分算子,ld表示d轴电感,lq表示q轴电感,ωr表示转子电角速度,表示转子永磁体产生的与定子绕组交链的磁链最大值;
16、b2、当采样周期ts足够短时,可以认为一个采样周期内电机转速保持不变,公式(2)、公式(3)成立;
17、pωr=0 (2)
18、pθ=ωr (3)
19、式中,θ表示在αβ参考坐标系中电机转子磁轴与α轴的相对角度;
20、b3、在dq参考坐标系下,选取状态变量如公式(4)所示:
21、x=[id iq ωr θ]t (4)
22、式中,t表示转置;
23、b4、选取输入变量如公式(5)所示:
24、u=[uα uβ]t (5)
25、式中,uα表示α轴电压,uβ表示β轴电压;
26、b5、选取观测变量如公式(6)所示:
27、y=[iα iβ]t (6);
28、b6、基于系统噪声q和测量噪声r,得到状态方程和观测方程如公式(7)所示:
29、
30、式中,xk表示第k次状态矩阵,yk表示第k次观测矩阵,k表示第k次采样点,k-1表示第k-1次采样点。
31、更进一步地,a、b、h、q、r分别如公式(8)、公式(9)、公式(10)、公式(11)和公式(12)所示:
32、
33、
34、
35、
36、
37、式中,ts表示采样周期。
38、进一步地,步骤c,具体为应用卡尔曼滤波器开展转子位置和转速评估预测与更新,包括以下步骤:
39、c1、扩展卡尔曼预测公式,如公式(13)、公式(14)所示:
40、
41、
42、式中,表示x的第k次先验估计,表示x的第k-1次最优估计,uk-1表示u的第k-1次输入值,qk-1表示第k-1次系统噪声,表示第k次真实值与预测值的先验误差协方差矩阵,pk-1表示第k-1次真实值与最优值的后验误差协方差矩阵;
43、c2、扩展卡尔曼更新公式,如公式(15)、公式(16)和公式(17)所示:
44、
45、
46、
47、式中,k表示扩展卡尔曼滤波系数,rk表示第k次测量噪声,pk表示第k次真实值与最优值的后验误差协方差矩阵,表示x的第k次最优估计。
48、进一步地,步骤d,具体包括以下步骤:
49、当转子转速最优估计值和通过旋转变压器采集的观测值偏差超过一定阈值时,认为旋转变压器采集信号失真,采用并联校正方式,综合考虑驱动轮转速传感器、旋转变压器信号,计算转子位置及转速最优估计值,如公式(18)、公式(19)、公式(20)和公式(21)所示:
50、
51、ωdrv=(ωdrvl+ωdrvr)*rdif/2 (19)
52、p1+p2=1 (20)
53、
54、式中,ωr表示转子转速,表示转子转速最优估计,ωry表示转子转速观测值,δ1、δ2表示偏差阈值,ωdrv、ωdrvl、ωdrvr表示驱动轮转速平均值、左驱动轮转速值、右驱动轮转速值,rdif表示差速器速比,p1、p2表示权值因子,θ0表示在αβ参考坐标系中电机转子磁轴与α轴的初始相对角度;t1表示电机开始运行时间;t2表示电机结束运行时间。
55、与现有技术相比,本发明的有益效果是:
56、本发明综合考虑旋转变压器、驱动轮转速传感器采集信息,进行模型评估,计算输出永磁同步电机转子位置和转速,优化高温、潮湿、多尘、电磁干扰较大等恶劣工况下电机转子位置及转速输出精度,进而优化转矩输出精度,提升整车驾驶体验;基于现有的电机、驱动轮系统的传感器,在系统成本不增加的前提下,通过优化设计提升了电机控制系统的鲁棒性。
本文地址:https://www.jishuxx.com/zhuanli/20241204/339899.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。