一种用于空间站对非合作目标航天器的捕获方法
- 国知局
- 2024-12-06 12:11:44
本发明属于空间站安全,特别是涉及一种用于空间站对非合作目标航天器的捕获方法。
背景技术:
1、空间站作为人类探索太空的重要基地,其安全运行直接关系到航天员的生命安全和太空实验任务的顺利进行。而非合作目标航天器是一类信息上不沟通、行为上不配合的航天器,如敌方航天器、失效卫星、空间碎片等。特别是,具有抵近侦察、滋扰、破坏等能力的非合作目标航天器对空间站的安全极不友好。因此,对影响己方空间站安全的非合作目标航天器进行及时抓捕显得尤为重要。
2、当前,针对空间目标航天器的捕获技术已取得一定进展,但仍存在诸多不足。现有的研究一般考虑单方面的空间自主交会任务,或者单独研究对机械臂或飞网的动作空间内的目标进行抓捕;这使得其适用范围有限,在面对非合作目标抓捕任务时尚不能形成一个完整的方案。对于同时对合作目标和具有不确定机动或挣扎行为的非合作目标进行交会与抓捕一体化的方法仍有待研究。而且传统方法仅考虑某一种代价指标或某一个阶段,在面对具有不确定机动行为和捕获后具有挣扎行为的非合作目标航天器时,尚未对抓捕方法进行全任务过程的设计,使得其适应性、代价和效率仍有待改善。
技术实现思路
1、本发明旨在提供了一种用于空间站对非合作目标航天器的捕获方法,解决了对在己方空间站运行轨道附近的非合作目标航天器进行抓捕的方法问题。
2、为了达到上述发明目的,本发明采用的技术方案如下:
3、提供了一种用于空间站对非合作目标航天器的捕获方法,其包括:
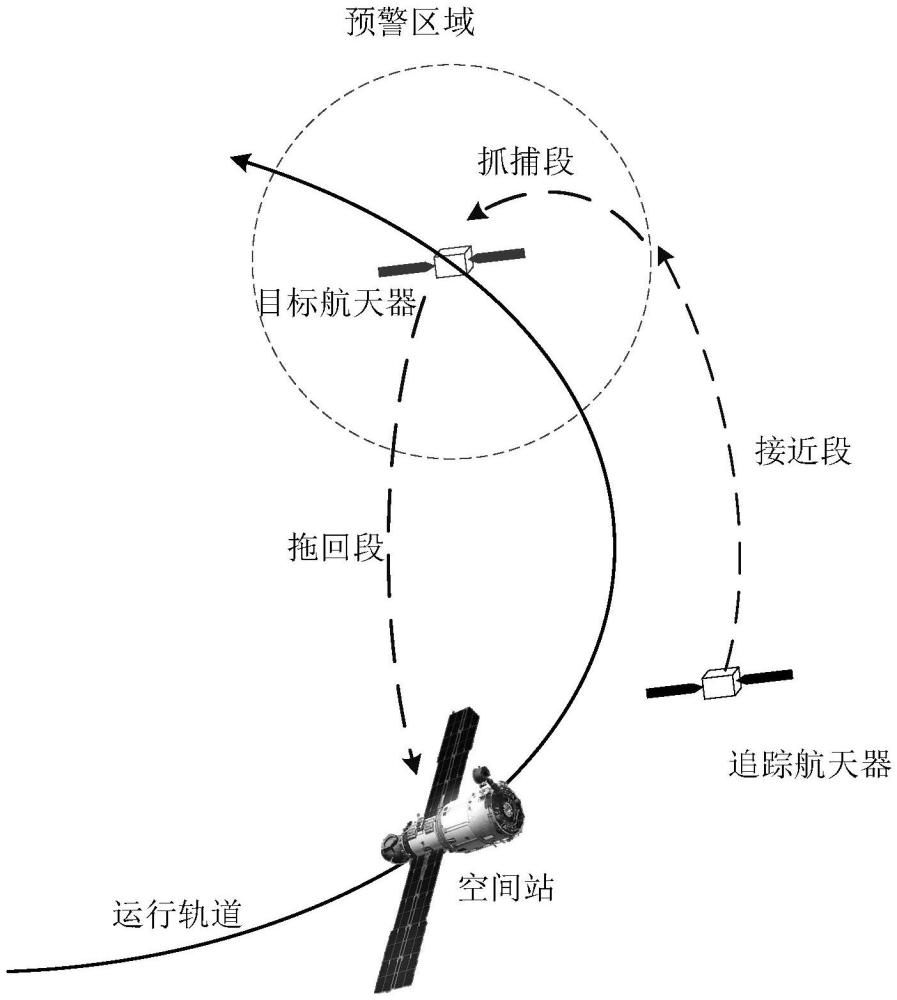
4、步骤1、追踪航天器接近目标航天器:地面基站对目标航天器进行持续跟踪,并获取目标航天器的轨道信息,追踪航天器从空间站出发并根据目标航天器的轨道信息航行接近目标航天器的预警区域;
5、步骤2、追踪航天器抓捕目标航天器:追踪航天器进入到目标航天器的预警区域后,目标航天器进行逃逸机动,地面基站以固定的时间间隔更新目标航天器的轨道信息,追踪航天器继续航行直至追踪航天器与目标航天器的距离达到抓捕距离后,视为抓捕成功;
6、步骤3、追踪航天器拖回目标航天器:抓捕目标航天器成功后,追踪航天器拖动目标航天器朝向空间站航行直至追踪航天器完全返回至空间站对接端口,完成对空间站中目标航天器的捕获任务。
7、进一步地,在步骤1中,追踪航天器接近目标航天器的方法包括:
8、步骤1.1、建立目标航天器轨道坐标系:以目标航天器的质心为原点,建立目标航天器轨道坐标系,目标航天器位于otxtytzt坐标系中的原点位置,坐标系跟随目标航天器移动,目标航天器的位置信息以及速度信息均为零,在k时刻,追踪航天器相对于目标航天器的相对状态向量为xk=[xk yk zk vxk vyk vzk]t,xk ykzk分别为追踪航天器相对于目标航天器的位置在otxtytzt坐标系三个坐标轴方向的分量,vxkvyk vzk分别为追踪航天器相对于目标航天器的速度在otxtytzt坐标系三个坐标轴方向的分量,追踪航天器的脉冲机动为uk;在k+1时刻,追踪航天器k+1时刻的相对状态向量为xk+1,追踪航天器的脉冲机动为uk+1;
9、步骤1.2、采用模型预测控制算法作为追踪航天器接近目标航天器的制导方法;模型预测控制算法的表达式为:
10、
11、其中,j(uk,uk+1,...,uk+n)表示以控制变量uk+i,(i=0,1,...,n)为自变量的优化目标函数,constraints表示控制变量uk+i,(i=0,1,...,n)需满足的约束条件,n表示预测区间;
12、步骤1.3、选取两种优化目标函数j1以及j2;优化目标函数j1考虑预测区间末端的状态向量误差及控制代价;优化目标函数j2考虑整个预测区间内的状态向量误差及控制代价;
13、步骤1.4、将优化目标函数j1以及j2带入模型预测控制算法中,获得多种脉冲模型预测控制算法,使得追踪航天器获得不同的接近制导策略以接近目标航天器。
14、进一步地,在步骤1.3中,优化目标函数j1的表达式为:
15、
16、其中,xf表示最终期望追踪航天器到达的状态向量;表示k+np1时刻追踪航天器的状态向量;np1代表以j1作为优化目标函数时的预测区间;矩阵q1和r1分别表示在优化过程中,状态向量误差以及脉冲消耗的权重信息,其中q1为6×6矩阵,r1为3×3矩阵,并且两者均为对称半正定矩阵,即q1±0,r1±0;
17、优化目标函数j2的表达式为:
18、
19、其中,np2代表以j2作为优化目标函数时的预测区间;xf表示最终期望追踪航天器到达的状态向量,xf=[xf yf zf vxf vyf vzf]t,xfyfzf分别为最终期望追踪航天器到达的位置在otxtytzt坐标系三个坐标轴方向的分量,vxf vyfvzf分别为最终期望追踪航天器达到的速度在otxtytzt坐标系三个坐标轴方向的分量,xk+i表示k+i时刻追踪航天器的状态向量,矩阵q2和r2分别表示在优化过程中状态向量误差以及脉冲消耗的权重信息,其中q2为6×6矩阵,r2为3×3矩阵,并且两者均为对称半正定矩阵,即q2±0,r2±0。
20、进一步地,在步骤1中,考虑到追踪航天器每次脉冲机动不能为任意值,追踪航天器在航行接近目标航天器的单次脉冲机动速度最大值的计算公式为:
21、
22、其中,umax与umin分别代表追踪航天器在轴向上正方向与负方向的单次脉冲机动速度最大值;δt是追踪航天器单次脉冲持续的时间长度;isp_c表示追踪航天器的比推力大小;g0是海平面处的重力加速度;表示追踪航天器经喷嘴排出的所耗质量的变化率;mc表示追踪航天器总质量;并且同时需要注意随着追踪航天器的不断脉冲机动,会导致燃料减少,也必然会导致mc的减少,追踪航天器的脉冲最大值是一个时变约束。
23、进一步地,在步骤1.4中,以j1作为优化目标函数时,接近段单次脉冲模型预测控制算法的表达式为:
24、
25、以j2作为优化目标函数时,接近段单次脉冲模型预测控制算法的表达式为:
26、
27、其中,xk+i表示k+i时刻的追踪航天器的状态向量信息,k+i时刻到k+i+1时刻的间隔为一个采样时间sample_t,表示追踪航天器从k+i时刻到k+i+1时刻的状态转移矩阵;表示追踪航天器从k+i时刻到k+i+1时刻的输入矩阵;
28、以j1作为优化目标函数时,接近段多次脉冲模型预测控制算法的表达式为:
29、
30、以j2作为优化目标函数时,接近段多次脉冲模型预测控制算法的表达式为:
31、
32、其中,xk+j_i、xk+j_i+1、xk+j_n分别表示在k+j采样时间施加第i、第i+1、第n脉冲时的状态向量;n表示追踪航天器在一个采样时间sample_t的脉冲次数;表示追踪航天两个脉冲间隔内的状态转移矩阵,表示追踪航天器两个脉冲间隔内的输入矩阵,两个脉冲间隔时间为一个impulse_time,并且有(n-1)·impulse_time≤sample_t;表示一个采样时间内的最后一次脉冲到下一个采样时间开始的状态转移矩阵,表示一个采样时间内的最后一次脉冲到下一个采样时间开始的输入矩阵,最后一次脉冲到下一个新的采样时间开始的时间为sample_t-(n-1)·impulse_time。
33、进一步地,在步骤2中,追踪航天器抓捕目标航天器的方法包括:
34、步骤2.1、以追踪航天器为坐标原点,建立追踪轨道坐标系,目标航天器相对追踪航天器运动;
35、步骤2.2、根据追踪航天器当前轨道信息计算目标航天器的相对状态信息,计算公式为:
36、
37、其中,yk+1代表目标航天器k+1时刻,对于追踪航天器的相对运动状态向量;yk目标航天器k时刻,对于追踪航天器的相对运动状态向量,其表达式为yk=[xk yk zk vxk vykvzk]t;表示以追踪航天器当前轨道信息下求得的转移矩阵;vk表示目标航天器k时刻的逃逸机动;
38、步骤2.3、计算获取目标航天器在轴向上正方向与负方向的最大逃逸脉冲速度,计算公式为:
39、
40、其中,vmax与vmin分别代表目标航天器在轴向上正方向与负方向的最大逃逸脉冲速度;isp_t表示目标航天器的比推力大小;表示目标航天器经喷嘴排出的所耗质量的变化率;mt表示目标航天器总质量,并且同时需要注意随着目标航天器的不断逃逸脉冲机动,会导致燃料减少,也必然会导致mt的减少,这意味着目标航天器的逃逸脉冲最大值是一个时变约束;
41、步骤2.4、追踪航天器根据yk+1、vmax和vmin控制脉冲次数以及脉冲间隔对目标航天器进行追踪,直至追踪航天器与目标航天器的距离达到20m后,完成目标航天器的抓捕工作。
42、进一步地,在步骤3中,追踪航天器拖回目标航天器的方法包括:
43、步骤3.1、以空间站质心为原点,建立目标轨道坐标系,追踪航天器相对空间站运动,追踪航天器相对于空间站的位置信息以及速度信息用相对状态向量的表达式为:
44、xk=[xk yk zk vxk vyk vzk]t;
45、步骤3.2、设置约束条件,约束条件包括对追踪航天器和目标航天器设置的脉冲约束、在空间站附近设置的禁止区域以及追踪器航天器的视线约束;
46、步骤3.3、根据约束条件,采用模型预测控制算法作为追踪航天器拖回目标航天器的制导方法,将目标航天器拖回至空间站。
47、进一步地,在步骤3.2中,脉冲约束为:
48、
49、其中,umax与umin分别代表追踪航天器在轴向上正方向与负方向的最大脉冲速度,vmax与vmin分别代表目标航天器在轴向上正方向与负方向的最大挣扎脉冲速度;
50、禁止区域为:
51、f=(rk-rkoz)ts(rk-rkoz)≥1
52、其中,f代表一个非线性约束的椭球体空间,rk代表追踪航天器当前的相对位置信息,rkoz为禁区的中心位置,s为椭球体的形状矩阵;
53、s的表达式为:
54、
55、其中,rx,ry,rz分别表示x,y,z方向轴上的半长轴长度;禁止区域包括koz1、koz2和koz3,koz1表示整个空间站的禁区;koz2表示空间站主体的禁区;koz3表示太阳能板的禁区;
56、视线约束由一个四面锥体构成,锥体源于对接端口,围绕对接轴构成两个半角,视线约束的表达式为:
57、ni·(rk-rf)≤0(i=1,2,3,4)
58、其中,ni表示第i面锥面的单位法向量,方向朝外,rk代表追踪航天器的相对空间站质心的位置信息,rf代表对接端口的相对空间站质心的位置信息。
59、进一步地,在步骤3.3中,将追踪航天器拖回目标航天器过程划分为三个子阶段,
60、子阶段一为:追踪航天器距离空间站较远,无需考虑空间站精确的koz约束,在该阶段初期只有脉冲约束,当追踪航天器与空间站距离小于koz_distance时,加入koz3约束;在该阶段虽然没有将视线约束作为约束条件加入,不过考虑将其作为一个惩罚因子加入到优化目标函数中,引导追踪航天器进入到预定的视线约束内,可以视为软约束;
61、子阶段二为:当追踪航天器与空间站距离小于los_distance并且已经在视线约束约束内时,表明追踪航天器与空间站已经进入最后的交会对接时刻,将视线约束约束条件作为硬约束,koz1约束失效;不过由于需要考虑目标航天器的挣扎行为,在该阶段如果目标航天器突然产生机动,追踪航天器仍然有可能越出los,所以一旦在追踪航天器越出视线约束范围,并且距离禁止区域还有一定距离时,跳转至子阶段三,进行紧急避障;
62、子阶段三为:在该阶段,追踪航天器是由于目标航天器的挣扎机动越出视线约束范围,需要避免与空间站发生碰撞,同时在该阶段由于追踪航天器与目标航天器的相对距离较近,加入了koz2和koz3约束,与第一阶段相同,将视线约束作为一个惩罚因子加入到优化目标函数中,引导追踪航天器重新进入视线约束范围内,然后重返子阶段二,直至追踪航天器完全返回至空间站对接端口,完成对空间站中目标航天器的捕获任务。
63、进一步地,在子阶段一中,追踪航天器的制导算法为:
64、
65、在子阶段二中,追踪航天器的制导算法为:
66、
67、在子阶段三中,追踪航天器的制导算法为:
68、
69、在上述表达式中,r表示追踪航天器与空间站的距离,nj表示视线约束约束中四面锥的第j面的单位法向量(j=1,2,3,4),fj表示与空间站交会过程中的第j个禁止区域约束,p表示视线约束的权重。
70、本发明的有益效果为:本发明中的一种用于空间站对非合作目标航天器的捕获方法,将目标航天器的捕获过程分为接近段、抓捕段、拖回段三个阶段,针对接近段目标交会制导问题,考虑该阶段目标航天器无逃逸机动、末端相对轨道状态向量偏差、控制代价、脉冲约束,通过对不同优化目标函数、预测区间、脉冲次数以及脉冲间隔的分析,设计了接近段目标交会模型预测控制制导算法,获得了接近段的制导指令,实现了追踪航天器以最小的控制代价从空间站出发完成对目标航天器的接近,减少了追踪航天器燃料消耗。
71、针对抓捕段目标交会制导问题,考虑该阶段目标航天器有逃逸机动、末端相对轨道状态向量误差、控制代价、脉冲约束,通过对不同优化目标函数、预测区间、脉冲次数以及脉冲间隔的分析,设计了抓捕段目标交会模型预测控制制导算法,获得了抓捕段的制导指令,实现了追踪航天器以最短的抓捕时间完成对目标航天器的抓捕,缩短了目标航天器的逃逸时间。
72、针对拖回段目标交会制导问题,考虑该阶段目标航天器有挣扎机动、末端相对轨道状态向量误差、控制代价、脉冲约束、禁区约束、视线约束,通过对不同修正策略以及预测区间的分析,设计了拖回段目标交会模型预测控制制导算法,获得了拖回段的制导指令,实现了追踪航天器以最安全的方式完成与空间站的交会对接,降低了最终交会对接的失败率。
本文地址:https://www.jishuxx.com/zhuanli/20241204/339878.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。