多维地理信息驱动的机器人智能控制方法及系统与流程
- 国知局
- 2024-11-25 15:18:48
本发明属于机器人,具体涉及多维地理信息驱动的机器人智能控制方法及系统。
背景技术:
1、随人工智能技术的发展,人工智能机器人被越来越多的应用于各行各业当中,无论是代替人作业,还是加入工业生产中提高生产线的智能化,都发挥着重要的作用,成为很多行业急需的产品。其中,使用机器人对目标物体进行观测侦察,也是机器人研究的一个重要方向。
2、现有技术中,比如中国专利cn115437299a,公开了一种伴随运输机器人行进控制方法及系统,实时获取uwb信标与车载uwb基站的位置信息;实时获取多个车载采集装置相应采集到的多组数据,多个车载采集装置面向车体周围不同方位,每一组数据包括图像数据和距离数据;在接收到位置信息的情况下,根据位置信息计算得到机器人的第一运动参数,并根据第一运动参数控制机器人运动;在未接收到位置信息的情况下,根据多组数据计算得到跟随目标位置,根据跟随目标位置计算得到机器人的第二运动参数,并根据第二运动参数控制机人运动。再比如中国专利cn108885436a,公开了自主监视机器人系统,包括底盘;驱动器,将底盘支撑在家庭中的地板表面上方并且配置成使底盘移动经过地板表面;可变高度构件,联接到底盘并且能够垂直延伸;相机,由可变高度构件支撑;以及控制器,被配置为操作驱动器以将机器人导航到家庭内的位置,在到达第一位置时调节可变高度构件的高度,并且当可变高度构件处于调节高度时,操作相机以在第一位置处捕获家庭的数字图像。
3、上述两种现有技术,机器人未对目标进行锁定,不容易观测到机器人运行过程中目标的具体活动。因此,提供多维地理信息驱动的机器人智能控制方法及系统,以提高机器人工作效率和智能化水平,是亟待解决的问题。
技术实现思路
1、针对上述提出的技术问题,本发明提供多维地理信息驱动的机器人智能控制方法及系统。
2、第一方面,本发明提供了多维地理信息驱动的机器人智能控制方法,该方法包括如下步骤:
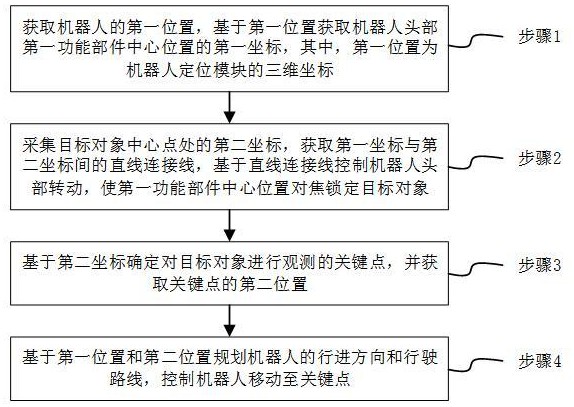
3、步骤1、获取机器人的第一位置,基于第一位置获取机器人头部第一功能部件中心位置的第一坐标,其中,第一位置为机器人定位模块的三维坐标;
4、步骤2、采集目标对象中心点处的第二坐标,获取第一坐标与第二坐标间的直线连接线,基于直线连接线控制机器人头部转动,使第一功能部件中心位置对焦锁定目标对象;
5、步骤3、基于第二坐标确定对目标对象进行观测的关键点,并获取关键点的第二位置;
6、步骤4、基于第一位置和第二位置规划机器人的行进方向和行驶路线,控制机器人移动至关键点。
7、具体地,目标对象为人、车辆、或物体。
8、具体地,步骤2中,基于直线连接线控制机器人头部转动包括:
9、实时获取第一功能部件中心位置处正面朝向所在的第一直线,计算第一直线与直线连接线的水平夹角,以及第一直线与直线连接线的垂直夹角;
10、基于水平夹角和垂直夹角控制机器人头部转动。
11、具体地,步骤4中,控制机器人移动至关键点过程中,若在机器人行驶方向上的目标区域内检测到第一障碍物,则进行以下操作:
12、步骤41、获取机器人当前时刻的第三位置和第一速度,并获取第一障碍物的第四位置和第二速度,其中,当前时刻为检测到第一障碍物的时刻;
13、步骤42、基于第三位置、第一速度、第四位置和第二速度判断机器人和第一障碍物是否会相撞,若不会,则继续以第一速度沿着行驶路线行驶;若会,则进入步骤43;
14、步骤43、计算机器人底部中心点与第一障碍物底部中心点间的距离为第一预设距离时的第一相遇时间和第一障碍物的第一相遇位置;
15、步骤44、基于第一相遇时间和第一相遇位置分别生成第一类行驶路线和第二类行驶路线,其中,第一类行驶路线为以第一速度行驶的新规划路线,第二类行驶路线为以不同于第一速度的速度行驶的新规划路线;
16、步骤45、按照预设规则从第一类行驶路线和第二类行驶路线中获取新的行驶路线,控制机器人按照新的行驶路线行驶。
17、具体地,步骤44中,生成第一类行驶路线包括如下步骤:
18、步骤4411、提取第三位置和第二位置间的连接线,将经过第一相遇位置垂直于连接线的直线定义为第一参考线;
19、步骤4412、分别在第一参考线上,距离第一相遇位置第一预设距离处设置两个调整节点,将靠近第一障碍物的调整节点定义为第一调整节点,将远离第一障碍物的调整节点定义为第二调整节点;
20、步骤4413、将经过参考节点且平行于连接线的直线定义为第二参考线,将位于第二参考线上,靠近机器人一侧,距离参考节点第二预设距离的点设置为第三调整节点,并将位于第二参考线上,靠近关键点一侧,距离参考节点第三预设距离的点设置为第四调整节点,其中,参考节点为第一调整节点或第二调整节点;
21、步骤4414、将行驶路线上与第四调整节点垂直距离为第四预设距离的点设置为第五调整节点,随后基于第三位置、第三调整节点的位置、参考节点的位置、第四调整节点的位置、第五调整节点的位置和行驶路线生成第一类参考行驶路线;
22、步骤4415、当参考节点是第二调整节点时,进入步骤4416,当参考节点是第一调整节点时,进入步骤4418;
23、步骤4416、计算机器人到达参考节点的调整时间,并计算调整时间和第一相遇时间的时间差,判断时间差是否在预设范围内,若是,则将第一类参考行驶路线定义为第一类行驶路线,若不是,则进入步骤4417;
24、步骤4417、基于第一类参考行驶路线,重复步骤43,计算新的第一相遇时间和新的第一相遇位置,随后重复步骤4411,然后在连接线远离第一障碍物一侧的第一参考线上设置新的第二调整节点,随后重复步骤4413至步骤4417;
25、步骤4418、基于第一类参考行驶路线,判断机器人和第一障碍物是否会相撞,若不会,则进入步骤4419,若会,则进入步骤4420;
26、步骤4419、在第一参考线上,位于第一调整节点远离第一障碍物一侧,且距离第一调整节点第五预设距离的位置设置新的第一调整节点,并重复步骤4413至步骤4414,随后基于第一类参考行驶路线,判断机器人和第一障碍物是否会相撞,若不会,则重复步骤4419,若会,则将上一次判定不会相撞时的第一类参考行驶路线定义为第一类行驶路线;
27、步骤4420、基于第一类参考行驶路线,重复步骤43,计算新的第一相遇时间和新的第一相遇位置,随后重复步骤4411,然后在连接线靠近第一障碍物一侧的第一参考线上设置新的第一调整节点,随后重复步骤4413至步骤4415、以及步骤4413至步骤4420。
28、具体地,步骤44中,生成第二类行驶路线包括如下步骤:
29、步骤4421、提取第三位置和第二位置间的连接线,将经过第一相遇位置垂直于连接线的直线定义为第一参考线;
30、步骤4422、以第四位置为端点,以第一障碍物的行驶方向为延伸方向生成第三参考线,随后以第一相遇位置为基准点,按照第六预设距离的间隔,在第三参考线上靠近第一障碍物一侧设置n1个第二相遇位置,在第一参考线上远离第一障碍物一侧设置n2个第二相遇位置;
31、步骤4423、按照步骤4412至步骤4414的方法,为第一相遇位置和任一第二相遇位置生成两条第二类参考行驶路线,随后删除重复的路线,获取第二类行驶路线;
32、步骤4424、对于任一第二类行驶路线,控制机器人在第三位置和第三调整节点间变速行驶,越过第三调整节点后按照第一速度匀速行驶,以使机器人到达参考节点的时间与第一障碍物到达相遇位置的时间相同,其中,相遇位置为第一相遇位置或第二相遇位置。
33、具体地,步骤45中,将第一类行驶路线和第二类行驶路线中机器人无法通过的行驶路线删除,获取待定行驶路线集合,随后计算每条待定行驶路线的移动成本,将移动成本最小的待定行驶路线作为新的行驶路线行驶,移动成本的计算公式为:
34、,
35、其中,ci为第i条待定行驶路线的移动成本,α1和α2为参数权重系数,si为第i条待定行驶路线的总长度,ti为通过第i条待定行驶路线到达第二位置的时间。
36、具体地,机器人位置的获取方法包括:
37、步骤11、获取机器人的估计位置,以及数据采集设备采集的第一三维坐标点集合;
38、步骤12、基于估计位置和数据采集设备的采集范围,计算第一三维坐标点集合对应的采集区域,基于采集区域从第一存储模块获取第二三维坐标点集合,其中,第一存储模块存储的是机器人所在区域的标准三维坐标点集合;
39、步骤13、判断第二存储模块是否存储有不可识别区域,若有,则将不可识别区域对应的三维坐标点从第二三维坐标点集合中删除,生成新的第二三维坐标点集合,随后进入步骤14,若没有,则直接进入步骤14;
40、步骤14、计算第二三维坐标点集合中三维坐标点的总数,判断总数是否等于标准值,若等于,则直接进入步骤15,若不等于,则对第二三维坐标点集合进行增加或删减,生成第三三维坐标点集合,其中,第三三维坐标点集合中三维坐标点的数量等于标准值;
41、步骤15、对第一三维坐标点集合和参考三维坐标点集合进行匹配,随后基于匹配结果对估计位置进行调整,获取机器人位置,其中,参考三维坐标点集合为第二三维坐标点集合或第三三维坐标点集合。
42、具体地,步骤15之后还包括:
43、步骤16、判断采集区域是否有第二障碍物,若没有,则将第二存储模块中的不可识别区域删除,若有,则进入步骤17;
44、步骤17、获取第二障碍物的轮廓和第五位置,基于轮廓和第五位置,提取第二三维坐标点集合中被第二障碍物遮挡的遮挡部分;
45、步骤18、获取遮挡部分对应的立体轮廓,将立体轮廓围绕的区域定义为不可识别区域。
46、第二方面,本发明还提供了多维地理信息驱动的机器人智能控制系统,该系统包括:计算控制单元、定位模块和数据接收模块,计算控制单元包括第一计算模块、朝向控制模块、路线规划模块和行走控制模块;
47、定位模块,用于获取机器人的第一位置,其中,第一位置为机器人定位模块的三维坐标;
48、第一计算模块,用于根据第一位置获取机器人头部第一功能部件中心位置的第一坐标;
49、数据接收模块,用于采集目标对象中心点处的第二坐标;
50、朝向控制模块,还用于获取第一坐标与第二坐标间的直线连接线,基于直线连接线控制机器人头部转动,使第一功能部件中心位置对焦锁定目标对象;
51、第一计算模块,还用于根据第二坐标确定对目标对象进行观测的关键点,并获取关键点的第二位置;
52、路线规划模块,用于根据第一位置和第二位置规划机器人的行进方向和行驶路线;
53、行走控制模块,用于控制机器人移动至关键点。
54、与现有技术相比,本发明的有益效果至少如下所述:
55、本发明中,首先,基于机器人的位置计算机器人头部第一功能部件中心位置的第一坐标,随后采集目标对象中心点处的第二坐标,获取第一坐标与第二坐标间的直线连接线,基于直线连接线控制机器人头部转动,使第一功能部件中心位置对焦锁定目标对象,其次,基于机器人的位置和目标对象的位置,确定对目标进行观测的关键点位置,最后,规划机器人的行进方向和行驶路线,控制机器人移动至关键点位置,并在该关键点位置对目标对象进行监测。通过本发明,可以实时对目标进行锁定,机器人移动过程中也能实现对目标的视觉跟随,同时,在关键位置对目标对象进行观察,在不对目标对象造成影响的情况下,对目标对象进行全面观察,提高了机器人的工作效率和智能化水平。
本文地址:https://www.jishuxx.com/zhuanli/20241125/337297.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。