一种基于智能图像识别的多维水体浊度反演方法及系统
- 国知局
- 2024-11-21 12:05:26
本发明涉及水下图像处理,尤其涉及一种基于智能图像识别的多维水体浊度反演方法及系统。
背景技术:
1、水体浊度是反应水质和水生态系统重要的物理指标之一,与水体的悬浮物浓度、可见度和污染程度有关。水下浊度反演是指通过光学或其他手段直接或间接获得水体的浊度数据。传统的水下浊度测量方法依赖于人力或遥感卫星,无法同时满足大面积测量与时间连续性的需求。在全球气候变化和人类活动的双重影响下,水环境污染问题日益严重,迫切需要一种高效精确的水下浊度反演方法以支持水环境保护和治理工作开展。
2、相关技术的水体浊度识别通过使用光学后向散射浊度计(obs-3a)进行定点测量以及通过使用水色遥感卫星数据进行大范围水体浊度反演,但是,使用obs-3a测量水体浊度识别测量时依赖固定架子,只支持单点测量,难以实现大范围水域的浊度测量且需要人工安装obs-3a测量所需的架子,人力消耗较大,而使用水色遥感卫星数据进行大范围水体浊度的反演方法存在水色遥感卫星数据不连续的缺点。水色遥感卫星按预定的轨迹绕地球运动,有固定的重访问周期(1~30天),同时易受到雨天和云层的影响,难以获得同一区域连续时间的测量数据;另外遥感卫星反演浊度分辨率取决于水色遥感卫星数据空间分辨率。大部分遥感卫星数据空间分辨率为10m-300m,因此对于小范围亚米级分辨率的浊度测量,使用遥感卫星反演方法难以实现;且水色遥感卫星只能测量水体表层相关信息,无法测量深层水体浊度,因此相关技术难以获得具备高分辨率的水体浊度测量结果。
技术实现思路
1、为了解决上述技术问题,本发明的目的是提供一种基于智能图像识别的多维水体浊度反演方法及系统,能够实现多自由度、时间连续、高分辨率的水体浊度测量。
2、本发明所采用的第一技术方案是:一种基于智能图像识别的多维水体浊度反演方法,包括以下步骤:
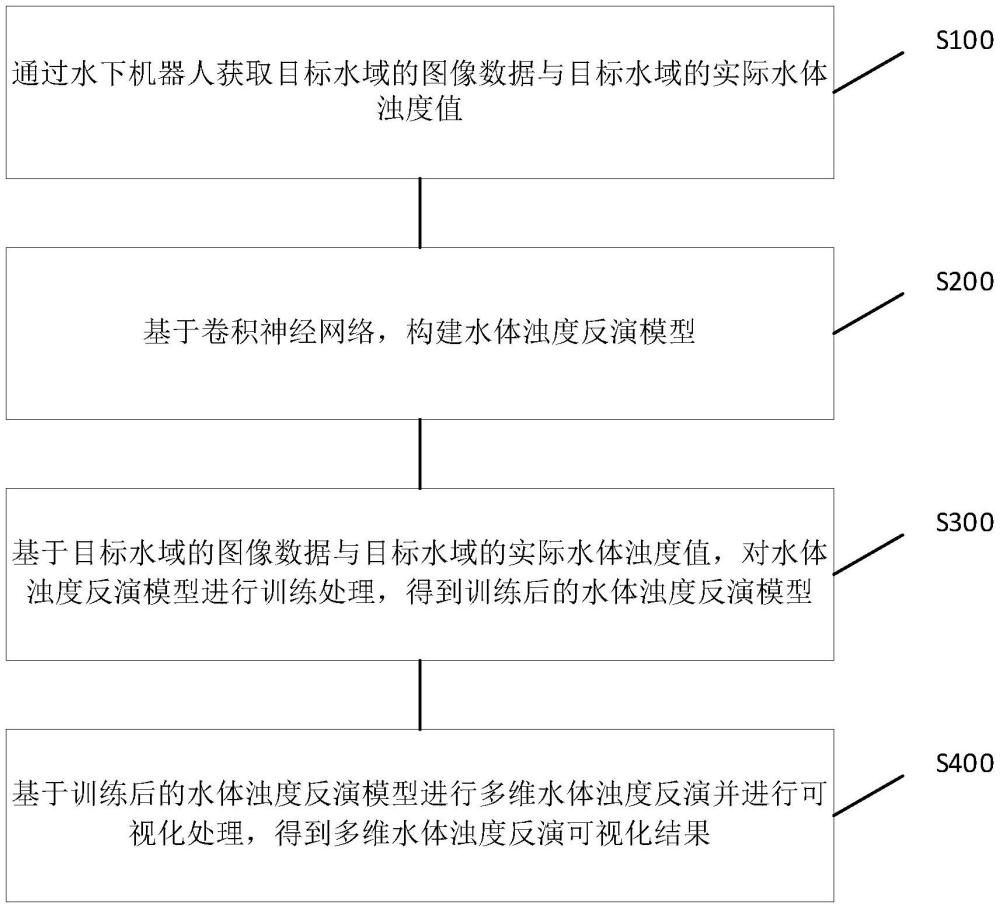
3、通过水下机器人获取目标水域的图像数据与目标水域的实际水体浊度值;
4、基于卷积神经网络,构建水体浊度反演模型;
5、基于目标水域的图像数据与目标水域的实际水体浊度值,对水体浊度反演模型进行训练处理,得到训练后的水体浊度反演模型;
6、基于训练后的水体浊度反演模型进行多维水体浊度反演并进行可视化处理,得到多维水体浊度反演可视化结果。
7、进一步,所述通过水下机器人获取目标水域的图像数据与目标水域的实际水体浊度值这一步骤,其具体包括:
8、通过遥控手柄对水下机器人进行远程操控,控制水下机器人移动至目标水域,获取目标水域的水样数据;
9、通过摄像头对目标水域的水样数据进行拍摄处理,得到目标水域的图像数据;
10、通过浊度测量仪对目标水域的水样数据进行水体浊度测量处理,得到目标水域的实际水体浊度值。
11、进一步,所述水体浊度反演模型包括输入层、第一卷积层、第一池化层、第二卷积层、第二池化层、第三卷积层、第三池化层、flatten层、全连接层与输出层,其中,所述输入层、所述第一卷积层、所述第一池化层、所述第二卷积层、所述第二池化层、所述第三卷积层、所述第三池化层、所述flatten层、所述全连接层与所述输出层依次连接。
12、进一步,所述基于目标水域的图像数据与目标水域的实际水体浊度值,对水体浊度反演模型进行训练处理,得到训练后的水体浊度反演模型这一步骤,其具体包括:
13、将目标水域的图像数据输入至水体浊度反演模型进行水体浊度测量处理,得到目标水域的预测水体浊度值;
14、将目标水域的预测水体浊度值与目标水域的实际水体浊度值进行比较处理,得到比较结果;
15、若比较结果不满足预设精度要求,则重新将目标水域的图像数据输入至水体浊度反演模型进行水体浊度测量处理并与目标水域的实际水体浊度值进行比较处理;
16、直至比较结果满足预设精度要求,得到训练后的水体浊度反演模型。
17、进一步,所述将目标水域的图像数据输入至水体浊度反演模型进行水体浊度测量处理,得到目标水域的预测水体浊度值这一步骤,其具体包括:
18、将目标水域的图像数据输入至水体浊度反演模型;
19、基于水体浊度反演模型的输入层,获取目标水域的图像数据;
20、基于水体浊度反演模型的第一卷积层与第一池化层,对目标水域的图像数据进行特征提取与池化处理,得到第一目标水域的图像特征数据;
21、基于水体浊度反演模型的第二卷积层与第二池化层,对第一目标水域的图像特征数据进行特征提取与池化处理,得到第二目标水域的图像特征数据;
22、基于水体浊度反演模型的第三卷积层与第三池化层,对第二目标水域的图像特征数据进行特征提取与池化处理,得到第三目标水域的图像特征数据;
23、基于水体浊度反演模型的flatten层,对第三目标水域的图像特征数据进行降维处理,得到目标水域的一维图像特征数据;
24、基于水体浊度反演模型的全连接层,对目标水域的一维图像特征数据进行分类处理,得到待输出的目标水域的预测水体浊度值;
25、基于水体浊度反演模型的输出层,将待输出的目标水域的预测水体浊度值进行输出,得到目标水域的预测水体浊度值。
26、进一步,所述基于训练后的水体浊度反演模型进行多维水体浊度反演并进行可视化处理,得到多维水体浊度反演可视化结果这一步骤,其具体包括:
27、通过水下机器人的视频流框架对目标水域进行逐帧读取,获取目标水域的视频数据;
28、将目标水域的视频数据转换为图片数据并输入至训练后的水体浊度反演模型进行多维水体浊度反演,得到水体反演浊度值;
29、对水体反演浊度值进行可视化处理,得到多维水体浊度反演可视化结果。
30、本发明所采用的第二技术方案是:一种基于智能图像识别的多维水体浊度反演系统,包括:
31、获取模块,用于通过水下机器人获取目标水域的图像数据与目标水域的实际水体浊度值;
32、构建模块,用于基于卷积神经网络,构建水体浊度反演模型;
33、训练模块,用于基于目标水域的图像数据与目标水域的实际水体浊度值,对水体浊度反演模型进行训练处理,得到训练后的水体浊度反演模型;
34、反演可视化模块,用于基于训练后的水体浊度反演模型进行多维水体浊度反演并进行可视化处理,得到多维水体浊度反演可视化结果。
35、本发明方法及系统的有益效果是:本发明通过水下机器人获取目标水域的图像数据与目标水域的实际水体浊度值,能够实现水下多自由度大范围航行测量,进一步基于卷积神经网络,构建水体浊度反演模型,能够实现浊度数据的连续测量,进而进行多维水体浊度反演并进行可视化处理,从而反演出不同深度下水体的浊度,能够实现多自由度、时间连续、高分辨率的水体浊度测量。
技术特征:1.一种基于智能图像识别的多维水体浊度反演方法,其特征在于,包括以下步骤:
2.根据权利要求1所述一种基于智能图像识别的多维水体浊度反演方法,其特征在于,所述通过水下机器人获取目标水域的图像数据与目标水域的实际水体浊度值这一步骤,其具体包括:
3.根据权利要求2所述一种基于智能图像识别的多维水体浊度反演方法,其特征在于,所述水体浊度反演模型包括输入层、第一卷积层、第一池化层、第二卷积层、第二池化层、第三卷积层、第三池化层、flatten层、全连接层与输出层,其中,所述输入层、所述第一卷积层、所述第一池化层、所述第二卷积层、所述第二池化层、所述第三卷积层、所述第三池化层、所述flatten层、所述全连接层与所述输出层依次连接。
4.根据权利要求3所述一种基于智能图像识别的多维水体浊度反演方法,其特征在于,所述基于目标水域的图像数据与目标水域的实际水体浊度值,对水体浊度反演模型进行训练处理,得到训练后的水体浊度反演模型这一步骤,其具体包括:
5.根据权利要求4所述一种基于智能图像识别的多维水体浊度反演方法,其特征在于,所述将目标水域的图像数据输入至水体浊度反演模型进行水体浊度测量处理,得到目标水域的预测水体浊度值这一步骤,其具体包括:
6.根据权利要求5所述一种基于智能图像识别的多维水体浊度反演方法,其特征在于,所述基于训练后的水体浊度反演模型进行多维水体浊度反演并进行可视化处理,得到多维水体浊度反演可视化结果这一步骤,其具体包括:
7.一种基于智能图像识别的多维水体浊度反演系统,其特征在于,包括以下模块:
技术总结本发明公开了一种基于智能图像识别的多维水体浊度反演方法及系统,该方法包括:通过水下机器人获取目标水域的图像数据与目标水域的实际水体浊度值;基于卷积神经网络,构建水体浊度反演模型;基于目标水域的图像数据与目标水域的实际水体浊度值,对水体浊度反演模型进行训练处理,得到训练后的水体浊度反演模型;基于训练后的水体浊度反演模型进行多维水体浊度反演并进行可视化处理,得到多维水体浊度反演可视化结果。通过使用本发明,能够实现多自由度、时间连续、高分辨率的水体浊度测量。本发明作为一种基于智能图像识别的多维水体浊度反演方法及系统,可广泛应用于水下图像处理技术领域。技术研发人员:张晓鹤,何贤钊,黄颖怡,张思佳,焦少泽,林建良,杨清书受保护的技术使用者:中山大学技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/334231.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。