一种基于LabVIEW的EPS测试系统及测试方法与流程
- 国知局
- 2024-11-21 12:05:23
本发明涉及一种基于labview的eps测试系统及测试方法,属于汽车自动化测试。
背景技术:
1、近年来,eps(电动助力转向系统)产品因其结构紧凑、可靠性强、转向性能优秀且具有自诊断功能等优点,已被广泛安装在各类汽车上,而其品质直接影响到售后市场反馈,故而每一台产品出厂前均需要进行测试。目前eps产品需要用专业设备测试,费用昂贵,检测成本太高,且兼容性不强,因此,急需一种能够解决以上问题的eps测试系统及测试方法。
技术实现思路
1、本发明所要解决的技术问题是,克服现有技术的缺点,提供一种基于labview的eps测试系统及测试方法,能够兼容各类eps的测试,减少了投资成本,提高生产效率。
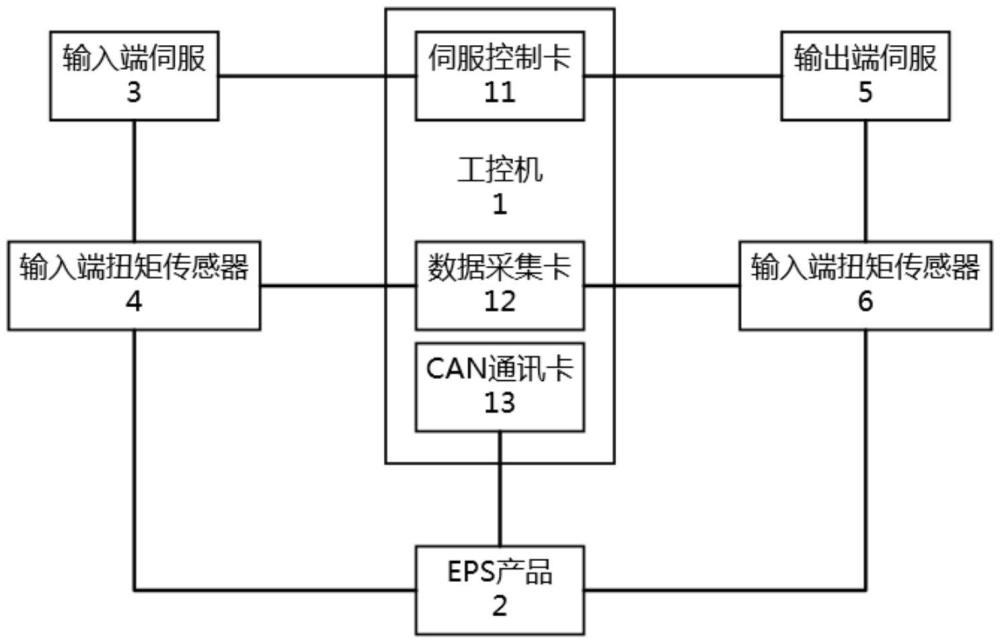
2、为了解决以上技术问题,本发明提供一种基于labview的eps测试系统,包括工控机、输入端伺服电机、输出端伺服电机、输入端扭矩传感器、输出端扭矩传感器及eps产品;
3、所述工控机上安装有伺服控制卡、数据采集卡和can通讯卡;
4、所述伺服控制卡为双路伺服控制卡,第一路与输入端伺服电机连接,第二路与输出端伺服电机连接;所述伺服控制卡用于接收电压信号,能够分别控制输入端伺服电机和输出端伺服电机运行,同时也能够分别采集输入端伺服电机和输出端伺服电机反馈的角度信号;
5、所述数据采集卡为双路数据采集卡,第一路与输入端扭矩传感器连接,第二路与输出端扭矩传感器连接;所述数据采集卡采集labview单元发出的变频脉冲指令,生产电压信号并将电压信号发送到伺服控制卡,数据采集卡分别采集输入端扭矩传感器及输出端扭矩传感器生产的扭矩信号,产生扭矩值并将扭矩值传输到工控机;
6、所述can通讯卡,通过can通讯卡编辑can报文,用以模拟整车的其余部分的can信号;
7、所述工控机内还安装有软件部分,包括用户登录模块、参数设置模块、产品诊断模块、数据采集模块、伺服控制模块、空载扭矩测试模块、助力功能测试模块、输入输出特性测试模块、测试结果输出模块和报表生成模块;
8、所述用户登录模块用于登录测试系统,并存储用户和密码信息;
9、所述参数设置模块用于设置空载扭矩测试模块、助力功能测试模块和输入输出特性测试模块的测试参数;
10、所述产品诊断模块用于读取eps产品的故障代码;
11、所述数据采集模块用于采集输入端扭矩传感器及输出端扭矩传感器的扭矩信号;所述数据采集模块用于读取labview单元发出的变频脉冲指令,产生电压信号并下发给伺服控制卡;
12、所述伺服控制模块用于控制输入端及输出端伺服电机运行;
13、所述空载扭矩测试模块,输入端旋转速度可调节,输出端伺服电机脱开,数据采集模块采集输入端扭矩传感器扭矩值,利用xy图曲线控件进行测试结果的显示;
14、所述助力功能测试模块,用于自定义模拟整车的can信号,输入端负载扭矩和旋转速度均可调节,输出端负载扭矩和旋转速度均可调节,利用xy图曲线控件进行测试结果的显示;
15、所述输入输出特性测试模块,输入端扭矩设置为定量,输出端负载设置为定量,数据采集模块采集输入端扭矩传感器扭矩值和输出端扭矩传感器扭矩值,利用xy图曲线控件进行测试结果的显示;
16、所述测试结果输出模块用于展示空载扭矩测试模块、助力功能测试模块和输入输出特性测试模块等模块的测试结果;
17、所述报表生成模块将空载扭矩测试模块、助力功能测试模块和输入输出特性测试模块等模块的xy图和测试结果生成测试报告并保存在工控机内。
18、进一步的,所述输入端扭矩传感器与输入端伺服电机通过联轴器相连接,所述输出端扭矩传感器与输出端伺服电机通过联轴器相连接,所述输入端伺服电机和输出端伺服电机与伺服控制卡通过线束相连接,所述输入端扭矩传感器和输出端扭矩传感器与数据采集卡通过线束连接,所述的can通讯卡与eps产品通过线束连接;
19、伺服控制卡通过线束分别传递信号至输入端伺服电机和输出端伺服电机,输入端伺服电机和输出端伺服电机分别通过联轴器驱动输入端扭矩传感器和输出端扭矩传感器进行工作,输入端扭矩传感器和输出端扭矩传感器将采集的信号通过线束传递至数据采集卡。
20、一种基于labview的eps测试系统的测试方法,包括如下步骤:
21、步骤101,开始测试,通过用户登录模块进行登录;用户和密码信息存储在由labview数据库工具包创建的本地数据库中,用户通过输入用户名和密码来验证是否有权限可以进行试验;
22、步骤102,通过参数设置模块进行参数设置;用户可以选择已经保存过的参数,也可以自行添加新的参数;
23、步骤103,eps产品通过基于labview开发的产品诊断模块进行产品自检,labview借助can通讯卡发送uds诊断报文给产品,eps产品回复诊断结果的报文;
24、步骤104,通过labview将伺服控制卡上的状态进行复位,并打开使能端口,使输入端伺服电机和输出端伺服电机进入运行模式;在labview中调用daqnavi_lv.dll文件,输入扭矩传感器采样接口的port_in,dll文件输出原始扭矩信号data_out;再调用lvanlys.dll文件,将data_out经过iir_filters算法,输出最终的扭矩信号torque_out;输入端扭矩信号torque_input与输出端扭矩信号torque_output均按照上述方法获取;
25、步骤108,labview将步骤105、步骤106和步骤107采集的结果数据做判定,并通过布尔控件展示测试结果;
26、步骤109,基于labview的报表生成模块,将测试过程的数据按照预设好的模板生成统一风格的测试报表,供用户查询追溯。
27、进一步的,所述参数设置模块中的参数包括产品诊断模块、空载扭矩测试模块、助力功能测试模块和输入输出特性测试模块的所需的所有参数,包括但不限于产品诊断did参数、输入轴转速、输出轴转速及测试角度范围。
28、进一步的,所述步骤104后,通过空载扭矩测试模块、助力功能测试模块和输入输出特性测试模块分别进行步骤105空载扭矩测试、步骤106助力功能测试和步骤107输入输出特性测试;步骤105、步骤106和步骤107可以单独测试,也可以按顺序测试。
29、进一步的,所述步骤105,进行空载扭矩测试,输入端伺服电机与eps产品的输入端进行连接,输出端伺服电机从eps产品的输出端脱开,输入端伺服电机驱动产品一起旋转,输入端伺服产生的角度信号angle_input和输入端扭矩传感器信号torque_input会实时显示在xy波形图上,并计算出torque_input的最大波动;
30、计算torque_input最大波动方法如下:
31、s1、将torque_input输入至peaks detector.vi,端口配置为peaks,peaks判定阈值设置为torque_input的最大值,最终输出一组波峰数据;peaks detector.vi波峰计算实现方式如下:
32、s11、输入信号记为signal[i],其中,i为输入信号数组下标,输入信号的长度记为length,波峰peaks判定阈值记为threshold,波峰出现的点位记为peaks[num_peaks],其中num_peaks为输入信号数组下标,意为peaks出现的数量,默认步长为distance;
33、s12、判断signal[i]与其前一个siganl和后一个点signal相比是否是最大的值;
34、s13、当signal[i]是这个三个点中的最大值,且也比threshold大,记录当前的i值,并与peaks[num_peaks]当前值作差比较,差值大于distance,即将当前的i计入peaks[num_peaks]内;
35、s14、最终输出的peaks[num_peaks]即是signal[i]数组中peaks的位置;
36、s2、将torque_input输入至peaks detector.vi,端口配置为valleys,valleys判定阈值设置为torque_input的最小值,最终输出一组波谷数据;
37、s3、波峰数据与波谷数据依次做差,取差值中的最大值为torque_input的最大波动。
38、进一步的,步骤106,进行助力功能测试,输入端伺服电机与eps产品的输入端进行连接,输出端伺服电机与eps产品的输出端进行连接;输出端伺服电机以定扭矩模式运行,模拟整车运行的负载,输入端伺服电机以定转速模式运行驱动产品一起旋转;输入端扭矩传感器信号torque_input和输出端扭矩传感器信号torque_output分别显示在xy波形图上,并判断助力功能曲线是否在设定的功能判定框内;判断曲线是否在设定判定框内方法如下:
39、s1、功能判定框的最大值和最小值,输入至point in polygon.vi文件中的接口:多边形x和多边形y;point in polygon.vi实现方法如下:
40、s11、将输入的判定框多边形x和多边形y端点记为poly[i].x和poly[i].y(i为判定框端点的计数),记判定框端点总数为n;将需要判断的点p的坐标x和y记为p.x和p.y;
41、s12、将p沿水平方向画一条无限长的射线,这条线与多边形交点为奇数则说明这个点在判定框内;
42、s13、记poly[j]为poly[i]的前一个点;其中,当i为首个点时,j记为n-1,即最后一个点;s12的判断方法可以进一步分解为:当p.y处于poly[i].y和poly[j].y中间,且p与poly[i]两点的斜率小于poly[i]和poly[j]两点的斜率,那么即可认为p的水平射线与poly[i]和poly[j]两点的连线有交点;
43、s14、重复s13,计算出总交点,当交点为奇数,则点p位于多边形内;
44、s2、将torque_input和torque_output的每一个点输入至point in polygon.vi文件中的接口:x和y;
45、s3、point in polygon.vi文件输出结果,结果为内部即判定合格。
46、进一步的,步骤107,进行输入输出特性测试,输入端伺服电机与eps产品的输入端进行连接,输出端伺服电机连接在eps产品的输出端;输出端伺服电机抱死,输入端伺服以定转速模式运行驱动产品旋转到产品正向最大扭转角度和逆向扭转角度;输入端扭矩传感器信号torque_input和输出端扭矩传感器信号torque_output的数据分别显示在xy波形图上,并计算出eps产品的输入输出对称性;
47、计算出eps产品输入输出对称性的方法如下:
48、s1、输入一个产品对称性判定点y;
49、s2、在产品旋转到正向最大扭转角度的数据中,点y插入到torque_output中,通过interpolate 1d array.vi文件计算出点y对应的torque_input拟合点x_cw;
50、s3、将点(x_cw,y)导入polygon area.vi计算出正向输入输出的包络面积s_cw;
51、s4、在产品旋转到逆向最大扭转角度的数据中,点y插入到torque_output中,通过interpolate 1d array.vi文件计算出点y对应的torque_input拟合点x_ccw;
52、s5、将点(x_ccw,y)导入polygon area.vi计算出逆向输入输出的包络面积s_ccw;
53、s6、按照对称性计算公式:计算出eps产品输入输出对称性。
54、进一步的,所述输入输出特性测试模块的输出端负载设置为定量,输入端扭矩设置为定量,所述的输入输出特性测试模块利用xy图曲线控件进行测试结果的显示。
55、进一步的,所述产品诊断模块、空载扭矩测试模块、助力功能测试模块和输入输出特性测试模块的参数在软件配置页面进行设置。
56、与现有技术相比,本发明的有益效果为:
57、1、适用范围广,本发明可以对任意类型的eps产品进行测试,通过调整测试参数即可完成对产品测试的兼容,具有丰富的拓展性;
58、2、系统搭建难度低,整套系统的搭建仅需要输入端伺服、输出端伺服、输入端扭矩传感器、输出端扭矩传感器、工控机、伺服控制卡、数据采集卡和can通讯卡等部件
59、3、基于labview的测试系统,灵活度高,适合缺少编程经验的工程技术人员使用,适合工程项目的大规模推广。
本文地址:https://www.jishuxx.com/zhuanli/20241120/334223.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表