一种船载大惯量天线伺服系统预定时间同步控制方法
- 国知局
- 2024-11-21 12:23:06
本发明属于双电机伺服系统、船载大惯量伺服系统控制,针对船载大惯量天线伺服系统易受海风海浪等外界干扰影响以及控制器奇异性问题,提出一种船载大惯量天线伺服系统预定时间同步控制方法。
背景技术:
1、船载天线伺服系统是无线测控系统的重要组成部分。为了提高通信覆盖范围,深海通信通常需要船载大惯量天线伺服系统。然而,单台电机的输出功率有限,大功率电机的设计成本高,难以在海洋工程设备领域得到广泛应用。为了提高船载天线伺服系统的输出功率,采用多台电机同步驱动大惯量负载,有利于系统的快速响应。
2、目前,多电机同步驱动系统的研究还比较少,特别是在船载大惯量天线伺服系统领域,研究还处于起步阶段。为了提高同步和跟踪误差的收敛速度,研究人员提出了双电机驱动伺服系统的有限时间同步和跟踪控制方法,并克服了传输滞后、参数漂移和电机动态特性差异的影响。但是,有限时间控制的收敛时间取决于初始值,与控制参数有着复杂的关系,不能仅通过一个简单的参数获得。预定时间控制可以通过调节一个控制参数预先设置收敛时间的上界,简化了收敛时间和控制参数之间的关系,并且不依赖于系统的初始状态。然而,有限时间控制和预定时间控制均存在奇异性问题,使得控制输入趋于无穷大。现有的分段连续函数方法虽然能避免奇异性,却增加了计算的复杂度。因此,研究不增加计算复杂度的非奇异预定时间同步与跟踪控制器是十分必要的。
3、船载大惯量天线伺服系统在海洋环境中工作时,不可避免地会受到海浪和海风等未知外部干扰的影响,从而影响系统控制精度。因此,研究船载大惯量天线伺服系统的抗干扰控制方法补偿海浪海风的影响具有重要意义。现有的工作大多采用稳定平台等物理减震方式以补偿海浪海风的干扰,难以满足海上作业的快速性和高精度要求。因此,研究人员设计有限时间扰动观测器和固定时间扰动观测器快速估计和补偿外界干扰系统。然而,观测误差的收敛时间上界难以根据实际海况精确调节。
4、因此,针对存在海风海浪干扰的船载大惯量天线伺服系统,设计一种能够快速估计和补偿外界干扰,并使观测误差与控制误差的最小收敛时间上界仅与一个可调参数有关,避免控制器奇异性,降低计算复杂度,实现预定时间同步与跟踪的控制方法具有重要研究意义。
技术实现思路
1、为了减小海风海浪等外界干扰对船载大惯量天线伺服系统的影响,保证同步与跟踪误差在预先设定的时间内收敛至原点附近邻域,并使观测误差与控制误差的最小收敛时间上界仅与一个可调参数有关,本发明提出了一种船载大惯量天线伺服系统预定时间同步控制方法,首先构造预定时间扰动观测器估计并补偿海风海浪等外界扰动;其次,基于预定时间滑模面设计非奇异预定时间同步与跟踪控制器,降低计算复杂度;本发明可以快速补偿海风海浪等外界干扰,保证观测误差以及控制误差在预定时间内收敛至原点附近邻域,并且最小收敛时间上界可以通过调节一个可调参数预先设定。
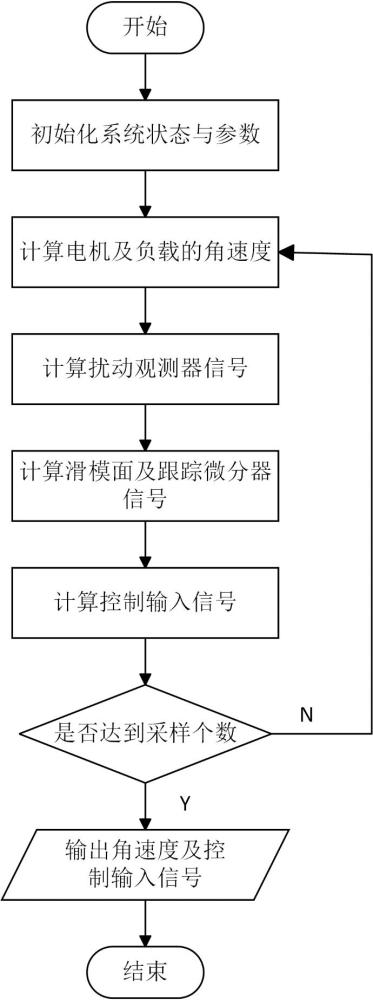
2、为了解决上述技术问题本发明提出了一种船载大惯量天线伺服系统预定时间同步控制方法,包括以下步骤:
3、步骤1,建立基于双电机驱动的船载大惯量天线伺服系统的动力学模型,初始化系统的状态与控制参数;
4、步骤2,设计预定时间扰动观测器补偿外界未知干扰;
5、步骤3,设计非奇异预定时间跟踪控制器保证负载跟踪误差在预定时间内收敛;
6、步骤4,设计非奇异预定时间同步控制器保证双电机同步误差在预定时间内收敛,实现预定时间同步控制。
7、进一步,所述步骤1的过程如下:
8、1.1 船载大惯量天线伺服系统的动力学表示为,
9、 (1);
10、其中,、和分别为负载的角位置、角速度和角加速度;、和分别为第个电机的角位置、角速度和角加速度;和分别为负载和电机的转动惯量;和分别为负载端和电机端的摩擦系数;为海浪、海风引起的额外扰动,为电磁干扰等因素产生的额外扰动;为传递力矩;为控制输入;
11、1.2根据式(1)得到负载和电机的角加速度为,
12、 (2);
13、1.3 定义状态变量,式(2)改写为如下形式的状态方程,
14、 (3);
15、 (4);
16、其中,分别表示的一阶导数;为状态变量,也是式(3)的虚拟控制输入;,;,。
17、更进一步,所述步骤2中,针对式(3)和式(4),设计预定时间扰动观测器补偿外界未知干扰,过程如下:
18、2.1 根据式(3)和式(4),得到如下估计模型,
19、 (5);
20、 (6);
21、其中,分别表示的估计值;分别表示的一阶导数;
22、2.2 定义状态观测误差和,根据式(3)、式(4)、式(5)和式(6)得到其导数为,
23、 (7);
24、其中,是外界未知干扰估计误差,且根据式(7)的收敛性与的收敛性一致;
25、2.3 根据式(5)和式(6),设计预定时间扰动观测器,
26、 (8);
27、 (9);
28、其中,,,,,均为正常数,,和为时间常数,表示符号函数。
29、再进一步,所述步骤3的过程如下:
30、3.1 定义如下跟踪误差,
31、 (10);
32、其中,表示期望跟踪轨迹;
33、3.2 根据式(10),设计如下非奇异预定时间滑模面,
34、 (11);
35、其中,表示的一阶导数,,,为常数,为时间常数;
36、3.3 对式(11)求导,并将式(3)和式(10)代入得到,
37、 (12);
38、3.4 根据式(12),设计如下非奇异预定时间跟踪控制器保证跟踪误差在预定时间内收敛,
39、 (13);
40、其中,,,为常数,为时间常数,为的二阶导数。
41、所述步骤4的过程如下:
42、4.1 将式(13)得到的虚拟控制输入代入如下跟踪微分器,
43、 (14);
44、其中,和分别为和的估计值,分别表示的一阶导数,均为正常数;
45、4.2 根据式(14),定义如下同步误差,
46、 (15);
47、其中,和均为正常数;
48、4.3 基于式(15)定义的同步误差,设计如下非奇异预定时间滑模面,
49、 (16);
50、其中,表示的一阶导数,,,为常数,为时间常数;
51、4.4 对式(16)求导,并将式(4)和式(15)代入得到,
52、 (17);
53、4.5 根据式(17)设计如下非奇异预定时间同步控制器保证同步误差在预定时间内收敛,
54、 (18);
55、其中,,,为常数,为时间常数,为的一阶导数。
56、本发明设计了一种船载大惯量天线伺服系统预定时间同步控制方法,提出的预定时间扰动观测器能快速估计和补偿海风海浪等外界干扰,设计非奇异预定时间同步与跟踪控制器,从而提高系统的抗干扰性能及同步与跟踪误差的收敛速度,避免控制器奇异性,降低计算复杂度,实现船载大惯量天线伺服系统在预先设定的时间内对期望轨迹的精确跟踪。
57、本发明的技术构思为:针对船载大惯量天线伺服系统易受海风海浪等外界干扰影响,设计预定时间扰动观测器,快速估计和补偿外界干扰,并且保证观测误差的最小收敛时间上界能够显含于一个可调参数,可以根据实际需求提前设定。此外,设计非奇异预定时间同步与跟踪控制器,避免控制器奇异性,降低计算复杂度,实现船载大惯量天线伺服系统的预定时间同步与跟踪控制。
58、本发明的有效效果:实现对海风海浪等外界干扰的预定时间估计和补偿,避免控制器奇异性,降低计算复杂度,实现船载大惯量天线伺服系统的预定时间同步与跟踪控制。
本文地址:https://www.jishuxx.com/zhuanli/20241120/335301.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。