交叉变异率自适应型NSGA-Ⅱ多目标柔性作业车间调度方法
- 国知局
- 2024-11-21 12:04:36
本发明涉及柔性作业车间调度领域,尤其是涉及一种交叉变异率自适应型nsga-ⅱ多目标柔性作业车间调度方法。
背景技术:
1、近年来,新型制造系统需要向着柔性化、智能化的方面发展,但如何在保证柔性化的同时,快速且准确的找到最优的调度方案还有很大的进步空间。本申请所研究的柔性作业车间调度指的是在车间生产过程中,以生产为中心,通过对有效的资源进行合理指挥、控制和调节,使待加工的作业能够均衡地安排到每台机器上,使完工时间最短,进而达到提高经济效益目的的过程。
2、求解fjsp的方法主要分为三类:精确算法、启发式算法和智能优化算法。精确算法的时间复杂度较大,不适合解决大规模的问题。启发式算法的求解速度快,但对于解的质量往往不大。对于智能优化算法,尽管近年来学者们已将诸如遗传算法、蚁群算法、粒子群算法、模拟退火算法等智能算法应用到该问题上的求解上,并取得了一定的效果,但至今仍没有得出一套完全良好的解决方案,因此该问题仍具有很大的研究空间。
3、因此,本申请针对多目标柔性作业车间调度问题(mofjsp),提出了一种交叉变异率自适应型nsga-ⅱ多目标柔性作业车间调度方法,并同时优化最大完工时间、机器总能耗两个关键目标。
技术实现思路
1、本申请提供交叉变异率自适应型nsga-ⅱ多目标柔性作业车间调度方法,通过对有效的资源进行合理指挥、控制和调节,使待加工的作业能够均衡地安排到每台机器上,使完工时间最短,进而达到提高经济效益目的的过程。
2、交叉变异率自适应型nsga-ⅱ多目标柔性作业车间调度方法,其特征在于,包括以下步骤:
3、s1:针对多目标柔性作业车间调度问题,以最小化的最大完工时间和机器总能耗最低为优化目标,建立多目标柔性作业车间调度模型;
4、s2:构建基于q-learning的交叉率、变异率自适应策略,包括:创建交叉变异两个q表,定义q表更新公式;以目标函数值计算适应度值,再以适应度值的大小来当做状态空间;对于每一代,智能体可采取不同的动作来获得合适的交叉率(pc)和变异率(pm),pc和pm分别选取不同间隔的概率值作为动作空间;以总体的平均适应度和种群多样性设计奖惩函数;采用改进的ε-贪心策略作为动作选择策略;实现交叉率、变异率的自适应策略;
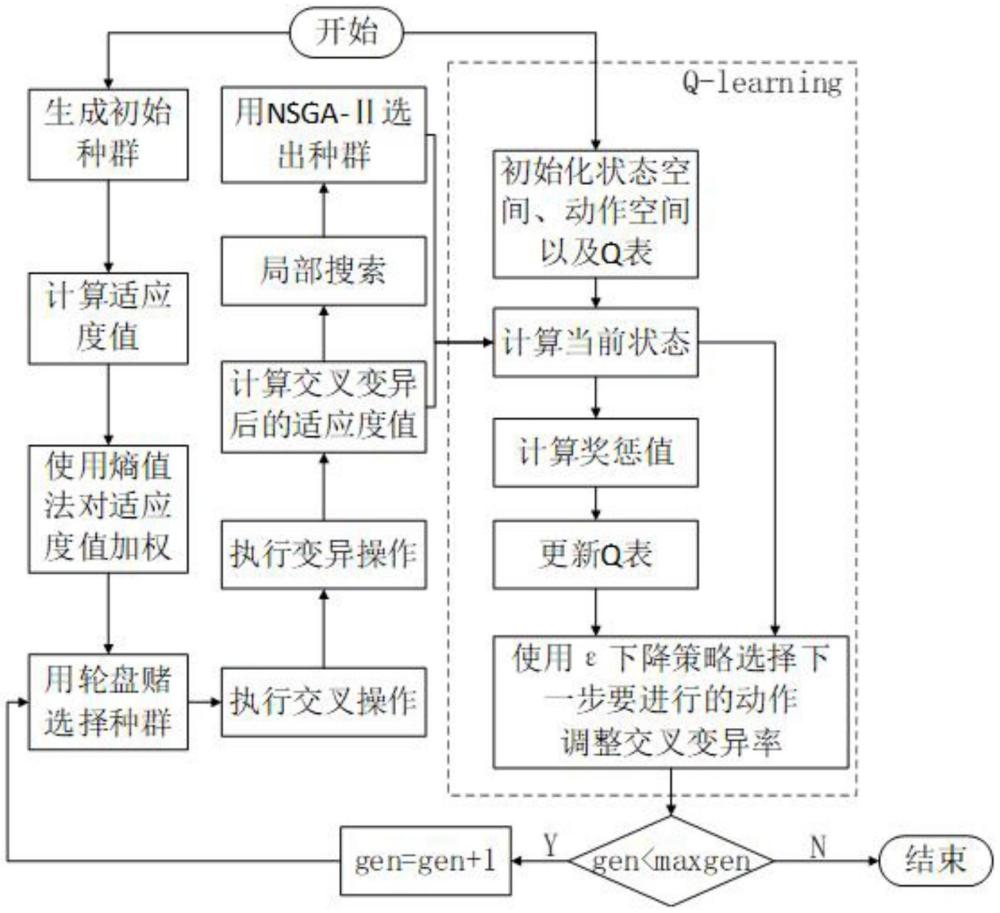
5、s3:将s2中的基于q-learning的交叉率、变异率自适应策略结合于nsga-ⅱ种群交叉、变异环节,以弥补nsga-ⅱ中交叉率(pc)和变异率(pm)固定不变的缺陷,并最终通过求解s1中多目标柔性作业车间调度模型的目标函数,逐渐得到最优解,包括:首先,使用三种初始化策略生成初始解,再基于熵值法对初始种群进行排序与选择;然后,初始化q-learning的学习过程,pc和pm在一定范围内随机选择;接下来,经过交叉变异操作后得到一个新的种群,计算它们的状态和奖励,用q-learning中q表更新公式来更新q表;最后利用带有禁忌搜索策略的局部搜索算法来获得非支配解。
6、综上所述,本申请具有以下有益效果:
7、本申请研究了交叉变异率自适应型nsga-ⅱ多目标柔性作业车间调度问题,提出了以最小化最大完工时间、机器总能耗为优化目标的qnsga-ⅱ算法,对于问题模型,设计了三种种群初始化规则,利用熵值法将多个目标进行加权处理,以便采用轮盘赌的方式提高种群的多样性。为了使交叉变异参数能够自适应当前种群的进化状态,将强化学习中的q-learning算法与nsga-ⅱ进行融合,弥补了nsga-ⅱ中交叉率(pc)和变异率(pm)固定不变的缺陷,使得种群平均分布和具有多样性。
8、通过加入改进禁忌搜索算法的局部搜索策略,在搜索过程中使用禁忌表来避免陷入局部最优解,从而能够跳出局部最优并继续探索解空间,从而实现了局部和全局搜索能力,同时保留其解集的多样性和均匀性。
9、在动作选择策略中,扩展了经典的ε-greedy策略,引入了一种精英保存策略,使自适应参数能够在迭代前期更好地去选择更多的未知动作,在迭代后期能够更好地趋于收敛,并保存每一代中较优的个体。
技术特征:1.交叉变异率自适应型nsga-ⅱ多目标柔性作业车间调度方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的交叉变异率自适应型nsga-ⅱ多目标柔性作业车间调度方法,其特征在于,所述s1中多目标柔性作业车间调度模型的建立过程为:
3.根据权利要求1所述的交叉变异率自适应型nsga-ⅱ多目标柔性作业车间调度方法,其特征在于,所述s2中q表更新公式为:
4.根据权利要求1所述的交叉变异率自适应型nsga-ⅱ多目标柔性作业车间调度方法,其特征在于,所述s2中适应度值函数主要考虑以下几个方面:
5.根据权利要求1所述的交叉变异率自适应型nsga-ⅱ多目标柔性作业车间调度方法,其特征在于,所述s2中奖惩机制公式为:
6.根据权利要求1所述的交叉变异率自适应型nsga-ⅱ多目标柔性作业车间调度方法,其特征在于,所述s2中ε-贪心策略改进在于,ε值会随着迭代的增加逐步衰减,衰减到设置的最小值后停止衰减,其公式如下:
7.根据权利要求1所述的交叉变异率自适应型nsga-ⅱ多目标柔性作业车间调度方法,其特征在于,所述s3中种群三种初始化策略生成包括:完全随机生成初始解;按照最小时间生成初始解;按照先加工最大剩余时间生成初始解。
8.根据权利要求1所述的交叉变异率自适应型nsga-ⅱ多目标柔性作业车间调度方法,其特征在于,所述s3中熵值法的排序和选择,包括:将两个不同的目标值,即最小化最大完工时间、机器能耗,进行加权处理组合成一个综合的目标值进行排序,选择使用选择操作使用轮盘赌选择法。
9.根据权利要求1所述的交叉变异率自适应型nsga-ⅱ多目标柔性作业车间调度方法,其特征在于,所述s3中交叉后的种群直接当作变异的初始种群。
10.根据权利要求1所述的交叉变异率自适应型nsga-ⅱ多目标柔性作业车间调度方法,其特征在于,所述s3中带有禁忌搜索策略的局部搜索算法,包括:第一步要找到关键工序,即调度计划中总持续时间最长,对整个调度计划完成时间的影响最大,并且可能存在多条的路径;第二步是在保证前后工序的约束的前提下将关键工序转移到其他机器上;第三步建立禁忌表,对单个目标的个体进行局部搜索并将相关信息记录到禁忌表中。
技术总结本申请公开了交叉变异率自适应型NSGA‑Ⅱ多目标柔性作业车间调度方法,本申请以最小化的最大完工时间和机器总能耗最低为优化目标,建立多目标柔性作业车间调度模型,基于Q‑learning的交叉率、变异率自适应策略结合于NSGA‑Ⅱ种群交叉、变异环节,弥补NSGA‑Ⅱ中交叉率和变异率固定不变的缺陷,并最终通过求解多目标柔性作业车间调度模型的目标函数,逐渐得到最优解,使用三种初始化策略生成初始解,再基于熵值法对初始种群进行排序与选择;然后,初始化Q‑learning的学习过程,交叉率和变异率在一定范围内随机选择;接下来,经过交叉变异操作后得到一个新的种群,计算它们的状态和奖励,用Q‑learning中Q表更新公式来更新Q表;最后利用带有禁忌搜索策略的局部搜索算法来获得非支配解。技术研发人员:张国辉,李志霄,郭胜会,余娜娜,寇晓菲,闫琼受保护的技术使用者:郑州航空工业管理学院技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/334142.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。