一种自主交叉口通信组网与车辆轨迹联合优化方法与系统
- 国知局
- 2024-10-21 14:46:05
本发明涉及无线通信的,尤其涉及一种自主交叉口通信组网与车辆轨迹联合优化方法与系统。
背景技术:
1、随着v2x(vehicle to everything,车辆对一切)通信技术的发展,智能网联车辆可以与其他道路交通参与者实时交换运动信息,从而实现无信号交叉口的协同驾驶。现有的大多数协同驾驶研究假设通信环境是理想的,忽略了智能网联车辆控制策略和通信组网的耦合关系。由于现实中不可避免的通信时延和丢包,导致难以实现智能网联车辆控制的理论上界,甚至产生严重的安全隐患。因此,为了适应城区交叉口的通信环境,迫切需要从交通通信耦合的角度提升协同驾驶策略。
2、现有研究通常将智能网联车辆控制和通信组网分离成两个系统来优化。一些研究通常将通信系统的不稳定性量化为通信时延或者故障,研究通信扰动对控制策略的影响。还有一些工作集中在车辆或者协同系统对通信时延和故障的被动反馈。通过提升协同策略的容错机制,消除通信故障给交通系统带来的潜在威胁。但是,这些方法适用于列式车队和相对简单的协同系统(如匝道),并不适用于具有强耦合关系的城区无信号交叉口。智能网联车辆只能通过加强协作技术的容错机制来被动应对通信不稳定,而不能对通信环境的改善做出贡献。
3、自主式交叉口的通信具有需求量大、高并发、非时延容忍的特点。另外,由于树木和建筑物的遮挡,无信号交叉口通信环境复杂,若不对通信路由进行优化,会增加消息包的传输时延。现有的路由优化协议在适配无信号交叉口的协同驾驶系统方面存在一些问题,如关注单数据包个体收益的路由可靠性优化问题,忽略了通信网络整体收益最大化。在具有高密度通信需求的协同驾驶系统中,高并发的通信需求可能导致信道拥塞,从而引发传输时延增加。上述问题导致通信系统的组网需求难以反馈并干预车辆的驾驶控制;此外,适用场景通常只涉及一维的车辆跟驰运动,而不关注交叉口的二维道路特性带来的复杂交互行为(如跟驰、合流、冲突等)和复杂的通信环境(如建筑物和设施遮挡导致的严重传输信号衰落),这给组网模型带来了更多的不确定性,存在通信需求无法反馈给交通系统,导致智能网联车辆轨迹与通信组网无法主动提供良好的通信环境的问题。
技术实现思路
1、为了克服现有技术存在通信需求无法反馈给交通系统,导致智能网联车辆轨迹与通信组网无法主动提供良好的通信环境的问题,本发明通过一种自主交叉口通信组网与车辆轨迹联合优化方法与系统,能够显著降低通信不稳定对自主式交叉口的智能网联车辆控制策略的负面影响,实现交通系统和通信系统协同优化的闭环运作机制。
2、为实现本发明的目的,本发明采用如下技术方案实现:
3、一种自主交叉口通信组网与车辆轨迹联合优化方法,所述方法包括以下步骤:
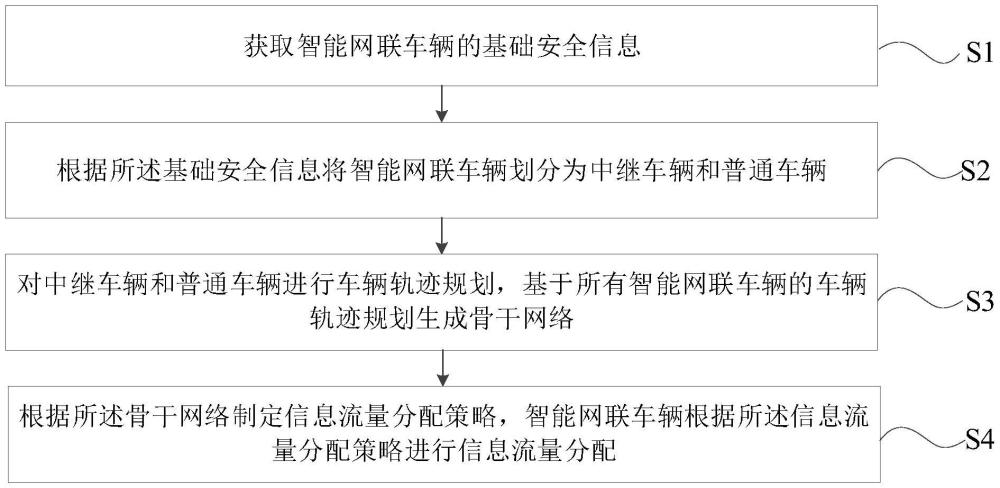
4、获取智能网联车辆的基础安全信息;
5、根据所述基础安全信息将智能网联车辆划分为中继车辆和普通车辆;
6、对中继车辆和普通车辆进行车辆轨迹规划,基于所有智能网联车辆的车辆轨迹规划生成骨干网络;
7、根据所述骨干网络制定信息流量分配策略,智能网联车辆根据所述信息流量分配策略进行信息流量分配。
8、在上述技术方案中,通过基于智能网联车辆的基础安全信息,将智能网联车辆划分为中继车辆和普通车辆,能够识别在优化通信网络中起关键作用的节点,进而实现集中式组网和分布式控车;通过对中继车辆和普通车辆进行车辆轨迹规划,能够确保它们在整个通信周期中位于视距通信环境中,提升通信组网的鲁棒性;基于所有智能网联车辆的车辆轨迹规划生成骨干网络,并根据所述骨干网络制定信息流量分配策略,这种分阶段组网模式能够降低问题复杂度,支持组网方案快速在线优化,从而能够显著降低通信不稳定对自主式交叉口的智能网联车辆控制策略的负面影响,实现交通系统和通信系统协同优化的闭环运作机制。
9、进一步地,根据所述基础安全信息将智能网联车辆划分为中继车辆和普通车辆的过程包括:
10、收集控制区域内所有智能网联车辆的基础安全信息,并将所述基础安全信息发送给边缘计算单元;
11、根据所述基础安全信息计算智能网联车辆的最大减速运动距离,表达式为:
12、
13、基于智能网联车辆的最大减速运动距离,将智能网联车辆分为中继车辆和普通车辆,表达式为:
14、
15、其中,δtro表示通信周期,表示通信周期δtro中智能网联车辆i的移动距离,i表示第i辆智能网联车辆,l表示移动距离,表示智能网联车辆i在时刻t的速度,amin表示最大减速度,ω1表示第一分类系数,ω2表示第二分类系数,表示中继车辆的集合,表示普通车辆的集合,所述基础安全信息包括车辆编号、位置及速度。
16、进一步地,根据智能网联车辆的最大减速运动距离,判断智能网联车辆是否能在视距通信区域的边界内停止移动,表达式为:
17、
18、计算智能网联车辆的路线通行压力,表达式为:
19、
20、其中,ela表示视距通信区域的边界,表示智能网联车辆i在时刻t在车道l上的行驶距离,pth表示通行压力的阈值,表示智能网联车辆i在时刻t在车道l上的通行压力。
21、在上述技术方案中,根据最大减速运动距离和路线通行压力对aim系统中的智能网联车辆划分为中继车辆和普通车辆,能够识别在优化通信网络中起关键作用的节点,进而实现集中式组网和分布式控车。
22、进一步地,对中继车辆和普通车辆进行车辆轨迹规划的过程包括:
23、为每一辆智能网联车辆构建轨迹规划模型,所述轨迹规划模型为每一辆智能网联车辆设置目标函数;
24、分别对普通车辆与中继车辆设置约束条件,基于普通车辆与中继车辆的约束条件,最小化每一辆车的目标函数,生成每一辆智能网联车辆的车辆轨迹规划信息。
25、进一步地,所述轨迹规划模型为每一辆智能网联车辆设置目标函数的过程包括:
26、轨迹规划模型将智能网联车辆在每个决策时间步的位置与交叉口终点之间的距离之和作为智能网联车辆的目标函数,计算智能网联车辆在每个时间步的运动距离,表达式为:
27、
28、计算智能网联车辆在每个时间步的运动速度,表达式为:
29、
30、其中,表示智能网联车辆i在时刻t在车道l上的行驶距离,表示智能网联车辆i在时刻t的速度,δttp表示通信周期。
31、进一步地,基于普通车辆与中继车辆的约束条件,最小化每一辆车的目标函数的过程包括:
32、对普通车辆和中继车辆设置跟驰安全距离约束,表达式为:
33、
34、对普通车辆和中继车辆设置冲突安全距离约束,表达式为:
35、
36、对中继车辆设置视距环境约束,表达式为:
37、
38、基于智能网联车辆的约束最小化每一辆车的目标函数,表达式为:
39、
40、采用滚动时域对每一辆智能网联车辆的目标函数进行迭代优化求解,以最小化每一辆车的目标函数,当智能网联车辆驶出交叉口时,输出优化结果,将优化结果作为智能网联车辆的车辆轨迹规划信息;
41、其中,表示跟驰安全约束的安全距离,lv表示车身长度,表示跟驰安全约束的松弛变量,表示冲突安全约束的安全距离,fl,h、fh,l分别表示车道l、h的冲突点到各自车道起点的距离,表示冲突安全约束的松弛变量,ti,l表示车道l对应的出口车道的尽头。
42、在上述技术方案中,通过对中继车辆和普通车辆进行车辆轨迹规划,中继车辆受到额外的视距环境约束,能够确保它们在整个通信周期中位于视距通信环境中,提升通信组网的鲁棒性。
43、进一步地,基于所有智能网联车辆的车辆轨迹规划生成骨干网络的过程包括:
44、收集控制区域内所有智能网联车辆的轨迹规划信息,基于轨迹规划信息对智能网联车辆间的通信效益进行评估,表达式为:
45、
46、根据评估结果计算智能网联车辆间的通信收益,表达式为:
47、
48、构建骨干网络优化模型,骨干网络优化模型根据计算的通信收益设置所有智能网联车辆间通信收益的目标函数,表达式为:
49、
50、求解目标函数得到骨干网络;
51、其中,di,j表示在通信周期δtro内智能网联车辆i和智能网联车辆i的平均距离,表示在智能网联车辆i的运动方向上的单位向量,表示智能网联车辆i和智能网联车辆j之间的向量,ei,j表示0-1变量,dr表示通信半径,m表示一个极大的数。
52、在上述技术方案中,基于所有智能网联车辆的车辆轨迹规划生成骨干网络,并根据所述骨干网络制定信息流量分配策略,这种分阶段组网模式能够降低问题复杂度,支持组网方案快速在线优化,从而能够显著降低通信不稳定对自主式交叉口的智能网联车辆控制策略的负面影响,实现交通系统和通信系统协同优化的闭环运作机制。
53、进一步地,采用主被动连边机制构建骨干网络优化模型,采用求解器gurobi求解所有智能网联车辆间通信收益的目标函数。
54、在上述技术方案中,采用的求解器gurobi能够更好地求解得到骨干网络。
55、进一步地,根据所述骨干网络制定信息流量分配策略的过程包括:
56、构建信息流量分配模型,信息流量分配模型根据骨干网络设置所有智能网联车辆间总信息传输时延的目标函数,表达式为:
57、
58、采用自适应大邻域搜索算法求解总信息传输时延的目标函数,以最小化总信息传输时延,得到全部信息包的多跳传输路径;
59、根据全部信息包的多跳传输路径制定信息流量分配策略,每一辆智能网联车辆根据所述信息流量分配策略进行信息流量分配;
60、其中,表示通过连边ei,j传输的消息包的数量,表示连边ei,j的平均传输时延。
61、在上述技术方案中,根据所述骨干网络制定信息流量分配策略,这种分阶段组网模式能够降低问题复杂度,支持组网方案快速在线优化,从而能够显著降低通信不稳定对自主式交叉口的智能网联车辆控制策略的负面影响,实现交通系统和通信系统协同优化的闭环运作机制。
62、一种自主交叉口通信组网与车辆轨迹联合优化系统,所述系统包括:
63、获取模块,用于获取智能网联车辆的基础安全信息;
64、处理模块,用于根据所述基础安全信息将智能网联车辆划分为中继车辆和普通车辆;
65、车辆轨迹规划模块,用于对中继车辆和普通车辆进行车辆轨迹规划;
66、骨干网络生成模块,用于基于所有智能网联车辆的车辆轨迹规划生成骨干网络;
67、信息流量分配模块,用于根据所述骨干网络制定信息流量分配策略,智能网联车辆根据所述信息流量分配策略进行信息流量分配。
68、相比现有技术,本发明的有益效果在于:
69、本发明提供一种自主交叉口通信组网与车辆轨迹联合优化方法与系统,通过基于智能网联车辆的基础安全信息,将智能网联车辆划分为中继车辆和普通车辆,能够识别在优化通信网络中起关键作用的节点,进而实现集中式组网和分布式控车;通过对中继车辆和普通车辆进行车辆轨迹规划,能够确保它们在整个通信周期中位于视距通信环境中,提升通信组网的鲁棒性;基于所有智能网联车辆的车辆轨迹规划生成骨干网络,并根据所述骨干网络制定信息流量分配策略,这种分阶段组网模式能够降低问题复杂度,支持组网方案快速在线优化,从而能够显著降低通信不稳定对自主式交叉口的智能网联车辆控制策略的负面影响,实现交通系统和通信系统协同优化的闭环运作机制
本文地址:https://www.jishuxx.com/zhuanli/20241021/319215.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表