一种考虑禁飞区规避的多飞行器协同制导方法及系统
- 国知局
- 2024-11-21 12:03:43
本技术涉及协同制导,特别是涉及一种考虑禁飞区规避的多飞行器协同制导方法及系统。
背景技术:
1、在当今复杂多变的战场环境中,协同制导技术的必要性愈发凸显。随着军事现代化的快速推进,单一武器系统的作战效能已难以满足现代战争的高强度、高精度要求。协同制导技术通过实现多个武器系统间的信息共享、目标分配和行动协同,大幅提升了作战效能和命中率。它不仅能够实现多武器系统对同一目标的联合打击,还能根据战场态势实时调整打击策略,实现快速响应和高效作战。因此,协同制导技术对于提升军队整体作战能力、保障国家安全具有重要意义。
2、目前,在飞行器集群协同制导问题研究中,大多数结果仅考虑多飞行器与被拦截目标本身。但是,当前战争往往是体系与体系的对抗。一方面,在复杂战场环境下,敌方探测雷达或预警机等探测装置对飞行器集群产生探测威胁,需对其进行必要的规避。另一方面,敌方主动防御装备如地面防空阵地等,同样会对飞行器集群产生威胁。在实际战场中对目标进行协同拦截时,飞行器集群不仅需要对目标实现拦截,而且需要针对敌方探测或拦截装备进行必要的规避,以提升飞行器集群的生存能力和保障毁伤效果。
3、近年来,多飞行器安全协同制导技术成为当前研究的焦点,吸引了众多专家学者的关注。然而,截至目前为止,相关研究成果相对有限,尤其是基于博弈理论的禁飞区规避协同制导方法几乎未受到广泛深入的研究,目前的研究中仅考虑了其特例或部分约束,针对全部约束的协同制导问题并未完全考虑。截至目前,尚未形成一套系统的方法来处理在禁飞区规避约束下仍然能够对机动目标进行博弈协同拦截。因此,有必要研究如何在禁飞区规避约束的情况下实现协同制导。
技术实现思路
1、本技术的目的是提供一种考虑禁飞区规避的多飞行器协同制导方法及系统,可控制多飞行器集群在规避禁飞区的同时,实现对机动目标的协同拦截。
2、为实现上述目的,本技术提供了如下方案:
3、第一方面,本技术提供了一种考虑禁飞区规避的多飞行器协同制导方法,包括以下步骤:
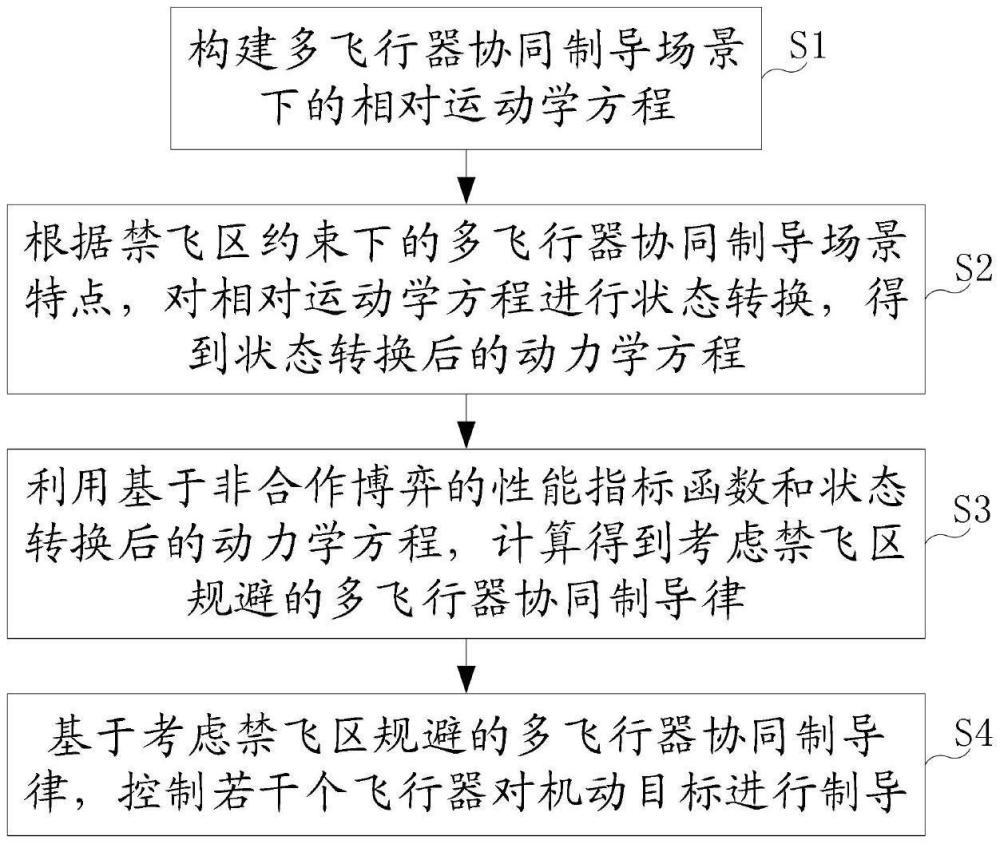
4、构建多飞行器协同制导场景下的相对运动学方程;多飞行器协同制导场景中包括若干个飞行器和一个机动目标,若干个飞行器形成碰撞角编队构型围捕机动目标。
5、根据禁飞区约束下的多飞行器协同制导场景特点,对相对运动学方程进行状态转换,得到状态转换后的动力学方程。
6、利用基于非合作博弈的性能指标函数和状态转换后的动力学方程,计算得到考虑禁飞区规避的多飞行器协同制导律;基于非合作博弈的性能指标函数中包括终端脱靶量优化项、能量优化项、相对碰撞角误差优化项和禁飞区距离优化项。
7、基于考虑禁飞区规避的多飞行器协同制导律,控制若干个飞行器对机动目标进行制导。
8、可选地,多飞行器协同制导场景下的相对运动学方程可通过下式表示:
9、
10、其中,yi为第i个飞行器和机动目标连线垂直于末制导初始时刻视线方向的距离,i∈{1,2,…,n},yai为第i个飞行器和禁飞区中心点连线垂直于末制导初始时刻第i个飞行器与机动目标视线方向的距离,θi是第i个飞行器的弹道倾角,符号上的点表示求导运算,一个点为求一阶导数,两个点为求二阶导数,kti=cos(θt0+qi0)代表机动目标线性化后加速度在垂直于其与第i个飞行器初始视线方向的投影系数,at为机动目标的法向加速度,ki=kai=cos(θi0-qi0)为第i个飞行器线性化后加速度在垂直于初始视线方向的投影系数,θi0和θt0分别为第i个飞行器和机动目标在末制导初始时刻的弹道倾角,qi0是第i个飞行器相对于机动目标在末制导初始时刻的视线角,am,i为第i个飞行器的法向加速度,vi是第i个飞行器的速度。
11、可选地,根据下式对所述相对运动学方程进行状态转换:
12、
13、其中,zi,1为预测终端脱靶量,zi,2为第i个飞行器的飞行方向角,zi,3为预测第i个飞行器经过禁飞区时与禁飞区垂直于初始视线方向的距离,tgoi=tfi-t是第i个飞行器距离击中机动目标所需要的剩余飞行时间,tfi为第i个飞行器与机动目标之间的飞行时间,t为当前时刻,ati是指机动目标的加速度在垂直于第i个飞行器的初始弹目连线方向的分量,τ为积分变量,tgoai=tfai-t是第i个飞行器与禁飞区中心连线的相对剩余飞行时间,tfai为第i个飞行器与禁飞区之间的飞行时间。
14、可选地,所述状态转换后的动力学方程可通过下式表示:
15、
16、可选地,基于非合作博弈的性能指标函数如下式所示:
17、
18、其中,ji为性能指标函数值;为终端脱靶量优化项,li为终端脱靶量优化项的性能权重;为能量优化项,ηi为能量优化项的性能权重;为相对碰撞角误差优化项,为相对碰撞角误差优化项的性能权重,为第i个飞行器的邻居飞行器集合,δhij为第i个飞行器与第j个飞行器之间的相对碰撞角误差;jzai为禁飞区距离优化项,若tfai≤tfi,χi为禁飞区距离优化项的性能权重,是常数且满足r是禁飞区威胁半径;若tfai>tfi,则jzai=0;li、ηi、和χi均是正常数。
19、可选地,考虑禁飞区规避的多飞行器协同制导律如下式所示:
20、
21、其中,上标t为转置操作,为第i个飞行器的动力学权重矩阵,ei为第i个飞行器的指定元素向量,i3为3维的单位矩阵,为克罗内克积,m为制导律计算辅助矩阵,z为状态向量,h为编队向量;ξ为与禁飞区相对距离相关的向量;di为第i个飞行器的度;和分别为多飞行器通信图的拉普拉斯矩阵和邻接矩阵,g代表协态变量与终端状态的对应矩阵。
22、第二方面,本技术提供了一种考虑禁飞区规避的多飞行器协同制导系统,用于实现如前文所述的考虑禁飞区规避的多飞行器协同制导方法,考虑禁飞区规避的多飞行器协同制导系统包括以下模块:
23、相对运动学方程构建模块,用于构建多飞行器协同制导场景下的相对运动学方程;多飞行器协同制导场景中包括若干个飞行器和一个机动目标,若干个飞行器形成碰撞角编队构型围捕机动目标。
24、运动学方程状态转换模块,用于根据禁飞区约束下的多飞行器协同制导场景特点,对相对运动学方程进行状态转换,得到状态转换后的动力学方程。
25、多飞行器协同制导律计算模块,用于利用基于非合作博弈的性能指标函数和状态转换后的动力学方程,计算得到考虑禁飞区规避的多飞行器协同制导律;基于非合作博弈的性能指标函数中包括终端脱靶量优化项、能量优化项、相对碰撞角误差优化项和禁飞区距离优化项。
26、多飞行器协同制导模块,用于基于考虑禁飞区规避的多飞行器协同制导律,控制若干个飞行器对机动目标进行制导。
27、第三方面,本技术提供了一种计算机设备,包括:存储器、处理器以存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序以实现上述中任一项所述的考虑禁飞区规避的多飞行器协同制导方法。
28、第四方面,本技术提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述中任一项所述的考虑禁飞区规避的多飞行器协同制导方法。
29、第五方面,本技术提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述中任一项所述的考虑禁飞区规避的多飞行器协同制导方法。
30、根据本技术提供的具体实施例,本技术公开了以下技术效果:
31、本技术提供了一种考虑禁飞区规避的多飞行器协同制导方法及系统,方法包括:构建多飞行器协同制导场景下的相对运动学方程;根据禁飞区约束下的多飞行器协同制导场景特点,对相对运动学方程进行状态转换,得到状态转换后的动力学方程;利用基于非合作博弈的性能指标函数和状态转换后的动力学方程,计算得到考虑禁飞区规避的多飞行器协同制导律;基于考虑禁飞区规避的多飞行器协同制导律,控制若干个飞行器对机动目标进行制导。本技术上述方法采用了基于非合作博弈理论的性能指标函数,其中考虑了终端脱靶量优化项、能量优化项、相对碰撞角误差优化项和禁飞区距离优化项,如此结合多飞行器运动学特点计算得到多飞行器协同制导律,使得多飞行器集群能够在规避禁飞区或在受到外部拦截或探测威胁的情况下,仍然可以实现对机动目标的协同拦截。
本文地址:https://www.jishuxx.com/zhuanli/20241120/334086.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。