基于虚拟动力学约束的仿人上肢机器人逆运动学求解方法
- 国知局
- 2024-11-21 12:03:15
本发明涉及仿人上肢机器人,尤其涉及基于虚拟动力学约束的仿人上肢机器人逆运动学求解方法。
背景技术:
1、在机器人或者机械臂控制过程中,对于一个串联的关节型机器人/机械臂,如果已知各个关节的角度去求机器人/机械臂末端的位置和姿态,这个过程为正运动学求解;反之,如果已知末端的位置和姿态去求各关节角度,这个过程称为逆运动学求解,即逆运动学描述由机器人/机械臂末端位置和姿态到机器人/机械臂各关节角度的映射关系。
2、早期的方法一般采取伪逆法来计算,但存在无法避免关节极限、受视觉噪声影响大等缺点。近年来,学者们又提出了梯度下降法、递归神经网络等方法用于求解带约束的机械臂逆运动学求解,但是梯度下降法存在对噪声敏感、奇异位形处无法求解的问题,递归神经网络的方法存在收敛速度慢、速度曲线不光滑的问题,并且这些方法在应用到视觉伺服中普遍需要额外增加卡尔曼滤波环节进行降噪处理。
技术实现思路
1、本发明为解决现有方法存在的对噪声敏感、收敛速度慢、速度不光滑的问题,提出一种基于虚拟动力学约束的仿人上肢机器人逆运动学求解方法。
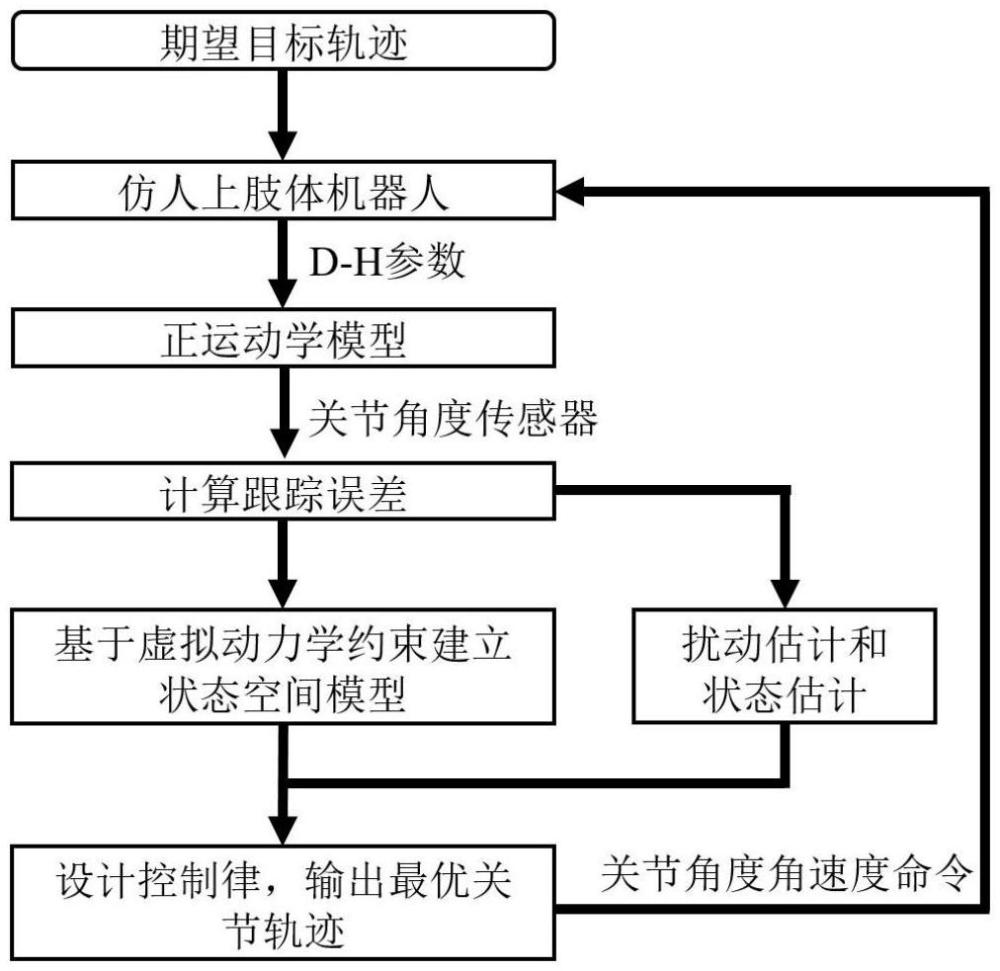
2、基于虚拟动力学约束的仿人上肢机器人逆运动学求解方法包含以下步骤:
3、s1、建立仿人上肢机器人的连杆坐标系,通过d-h参数建模得到正运动学方程;
4、s2、将所述正运动学方程求四阶导数,得到四阶正运动学模型;
5、s3、引入虚拟柔性关节动力学约束;
6、s4、将步骤s3的虚拟柔性关节动力学约束代入步骤s2得到的四阶正运动学模型,得到关于逆运动学求解问题的状态空间方程;
7、s5、设计控制律,使步骤s4得到的状态空间方程中的状态变量向零收敛;
8、s6、根据设计的控制律,然后利用步骤s3中的虚拟柔性关节动力学约束,求解得到双臂的关节角度轨迹的值。
9、进一步地,步骤s2得到的四阶正运动学模型为:
10、y(4)=δy+jθ(4)
11、式中,表示双臂的末端位置向量,是双臂的m自由度的关节角度向量,j表示双臂的雅可比矩阵,δy表示扰动项。
12、进一步地,步骤s3中引入的虚拟柔性关节动力学约束为:
13、
14、式中,m为被动系统惯性,d为主动系统惯性,k为系统刚度,λ(·)为阻尼器输出力矩,为主动系统转动角,是双臂的m自由度的关节角度向量,j表示双臂的雅可比矩阵,为主动系统的控制输入。
15、进一步地,步骤s4中得到关于逆运动学求解问题的状态空间方程为:
16、
17、式中,m为被动系统惯性,d为主动系统惯性,k为系统刚度,j表示双臂的雅可比矩阵,ey是末端轨迹的跟踪误差,为主动系统的控制输入,δe是合并后的扰动项。
18、进一步地,步骤s4设计的控制律q为:式中,a=[a1,a2,a3,a4]t是状态反馈系数,p=jm-1kd-1jt。
19、本发明相比现有技术的有益效果是:
20、本发明方法可实现仿人机器人逆运动学问题的求解,即给定末端轨迹时,可求解出关节角度轨迹;具有收敛速度快、求得的角度角速度曲线光滑和对噪声有抑制能力的优点。
21、相较于传统的伪逆方法,本发明具备避关节角度极限和关节角速度极限的功能,并且该方法对噪声有一定的抵制能力。
22、本发明在应用于仿人山肢体机器人的逆运动学解算中时,机器人具有更优越的运动学性能,消耗的能量更低。
23、下面结合附图和实施方式对本发明作进一步地说明:
技术特征:1.基于虚拟动力学约束的仿人上肢机器人逆运动学求解方法,其特征在于:包含以下步骤:
2.根据权利要求1所述基于虚拟动力学约束的仿人上肢机器人逆运动学求解方法,其特征在于:步骤s2得到的四阶正运动学模型为:
3.根据权利要求1所述基于虚拟动力学约束的仿人上肢机器人逆运动学求解方法,其特征在于:步骤s3中引入的虚拟柔性关节动力学约束为:
4.根据权利要求1所述基于虚拟动力学约束的仿人上肢机器人逆运动学求解方法,其特征在于:步骤s4中得到关于逆运动学求解问题的状态空间方程为:
5.根据权利要求4所述基于虚拟动力学约束的仿人上肢机器人逆运动学求解方法,其特征在于:步骤s4设计的控制律q为:式中,a=[a1,a2,a3,a4]t是状态反馈系数,p=jm-1kd-1jt。
6.根据权利要求1所述基于虚拟动力学约束的仿人上肢机器人逆运动学求解方法,其特征在于:所述步骤s1中的正运动学方程y=f(θ,θb),是待求解的维数为16的双臂关节角度向量,θb表示腰部的3自由度关节向量。
7.根据权利要求1所述基于虚拟动力学约束的仿人上肢机器人逆运动学求解方法,其特征在于:步骤s3的虚拟柔性关节动力学约束为具备噪声滤除能力的虚拟动力学约束。
8.根据权利要求2所述基于虚拟动力学约束的仿人上肢机器人逆运动学求解方法,其特征在于:步骤s2中雅可比矩阵
技术总结基于虚拟动力学约束的仿人上肢机器人逆运动学求解方法,属于仿人上肢机器人技术领域,所述方法包含:建立仿人上肢机器人的连杆坐标系,通过参数建模得到正运动学方程;将正运动学方程求四阶导数,得到四阶正运动学模型;引入虚拟柔性关节动力学约束;将虚拟柔性关节动力学约束代入四阶正运动学模型,得到关于逆运动学求解问题的状态空间方程;设计控制律,使得到的状态空间方程中的状态变量向零收敛;根据设计的控制律,然后利用虚拟柔性关节动力学约束,求解得到双臂的关节角度轨迹的值。本发明具有收敛速度快、求得的角度角速度曲线光滑和对噪声有抑制作用的优点,应用于仿人上肢体机器人的逆运动学解算中,机器人具有更优越的运动学性能。技术研发人员:金弘哲,印鸿,鞠枫嘉,刘家秀,赵杰受保护的技术使用者:哈尔滨工业大学技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/334042.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表