-
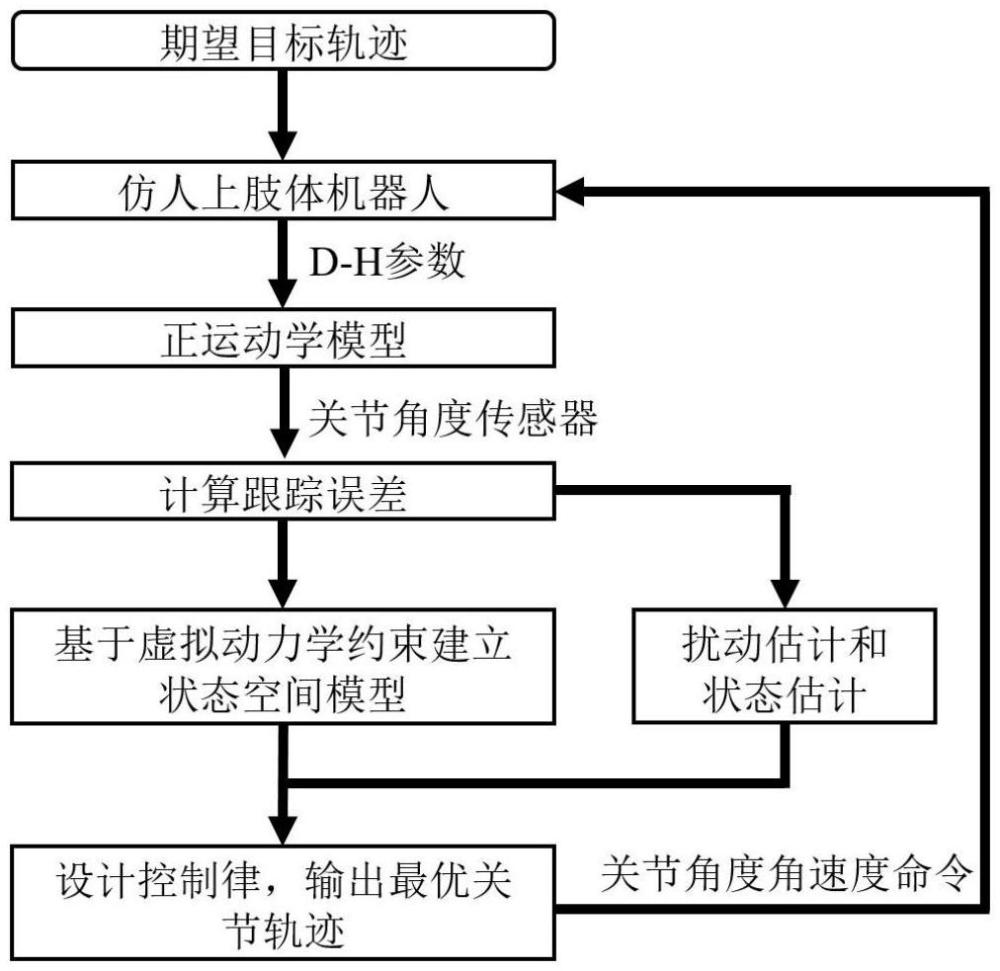
基于虚拟动力学约束的仿人上肢机器人逆运动学求解方法
本发明涉及仿人上肢机器人,尤其涉及基于虚拟动力学约束的仿人上肢机器人逆运动学求解方法。背景技术:1、在机器人或者机械臂控制过程中,对于一个串联的关节型机器人/机械臂,如果已知各个关节的角度去求机器人/......
-
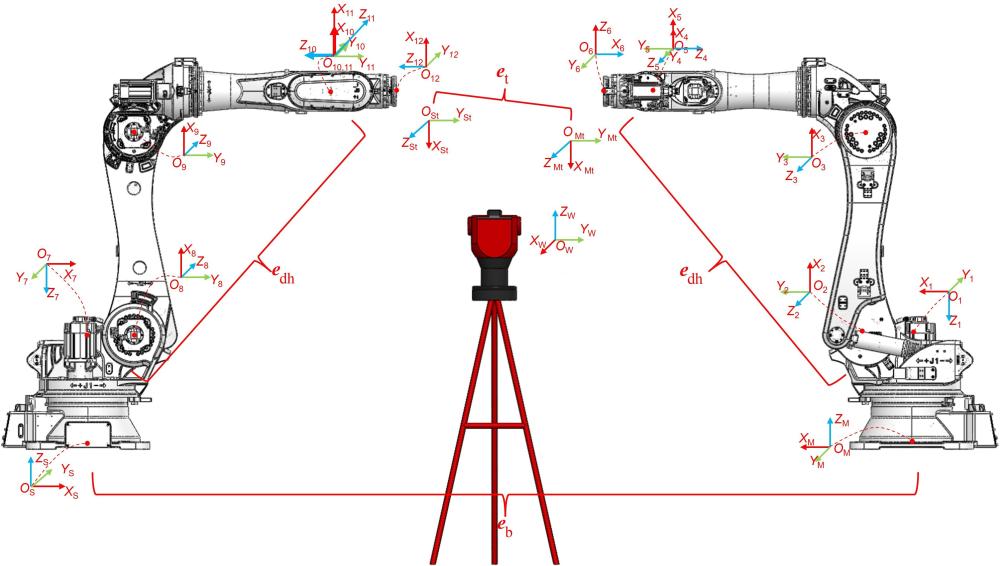
一种基于运动学模型的双机器人协同误差的标定方法
本发明属于工业机器人标定,具体涉及一种基于运动学模型的双机器人协同误差的标定方法。背景技术:1、工业机器人广泛应用于搬运、焊接、装配等领域,但目前大多数场景都是基于单机器人的应用,即使一条生产线上有很......
-
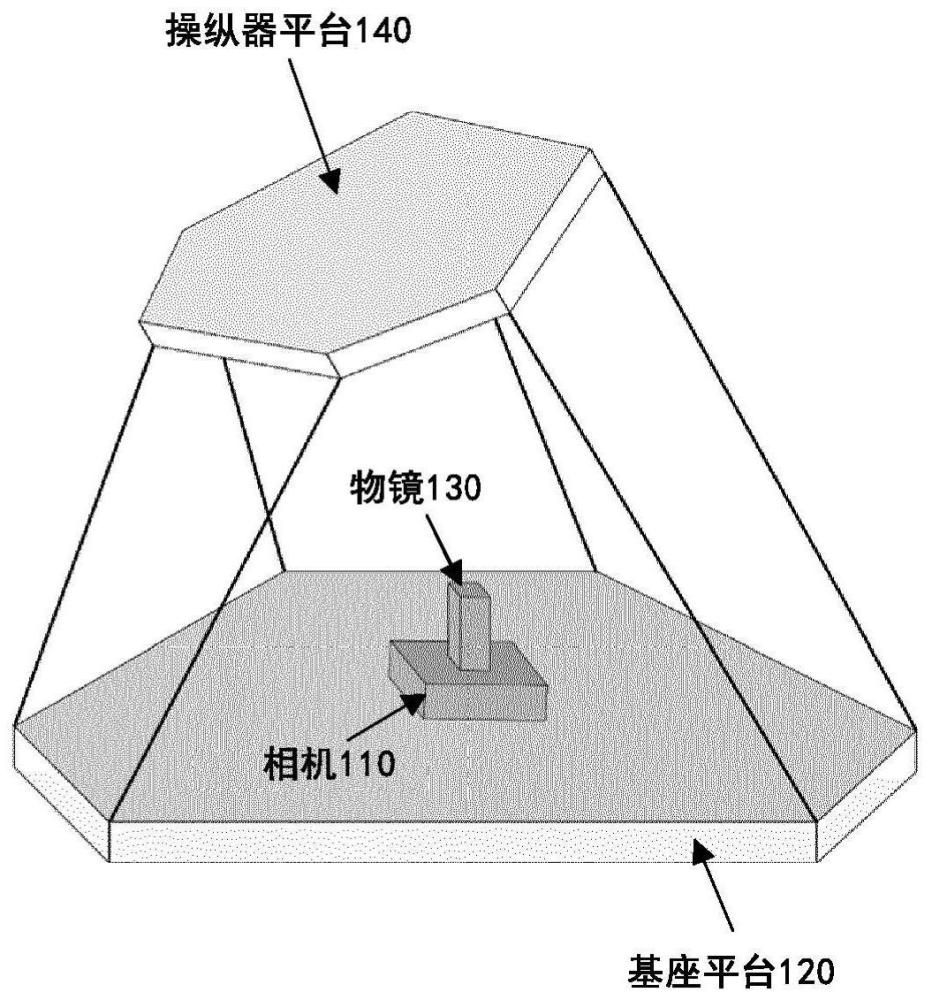
具有参考标记的并联运动学系统中的位姿确定的制作方法
本发明涉及用于确定并联运动学系统的位姿的装置和方法。背景技术:1、控制机器人时的常见问题是确定其当前位姿(位置和定向)。2、然而,具体而言,在并联运动学系统中,无法根据从动腿的长度或关节角度直接地和/......
-
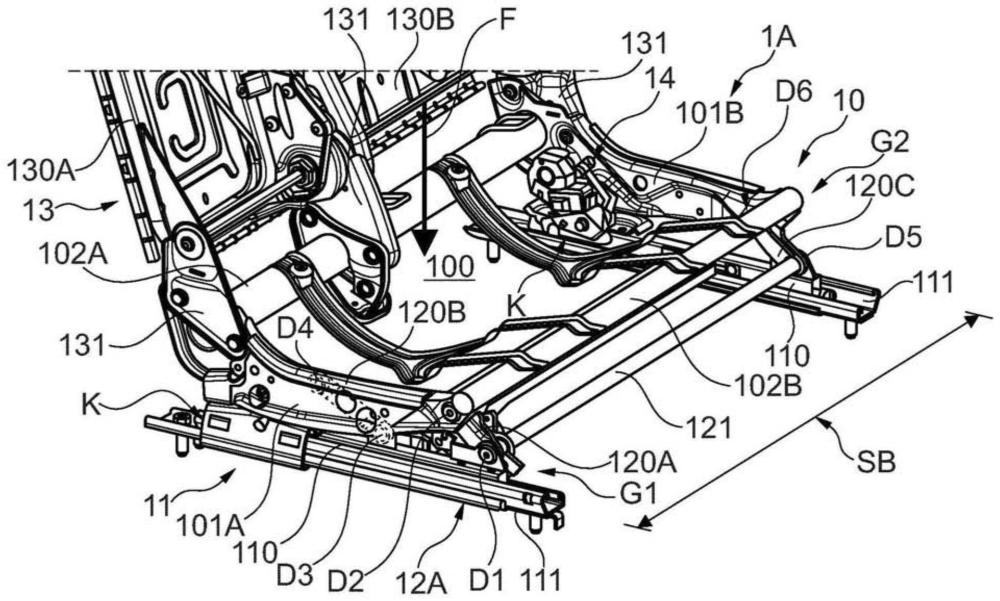
具有非对称的运动学装置的车辆座椅的制作方法
所提出的解决方案涉及一种根据权利要求1的前序部分的车辆座椅。背景技术:0、现有技术1、这种车辆座椅包括乘坐部分、底座和运动学装置,该乘坐部分限定具有座椅宽度的可乘坐的乘坐区域并且包括第一侧向部分和沿座......
-
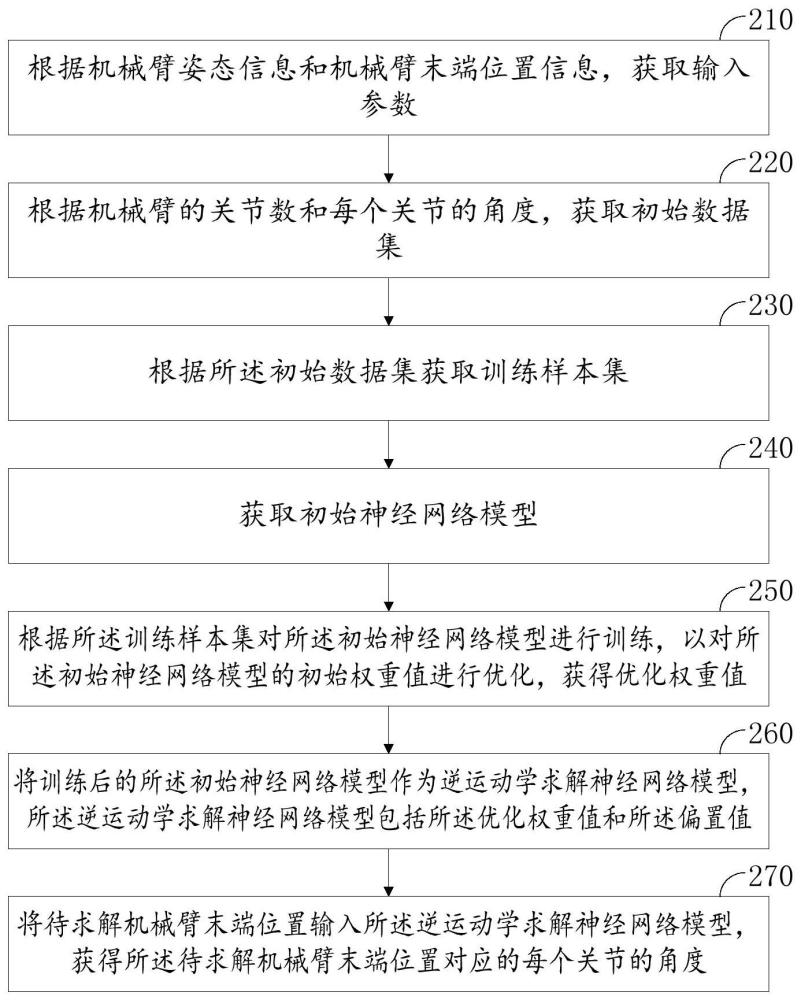
逆运动学求解的方法、装置、模型、设备及存储介质与流程
本发明涉及神经网络领域,尤其涉及一种逆运动学求解的方法、装置、模型、设备及存储介质。背景技术:1、随着信息技术、自动化和智能化水平的不断提高,多自由度机械臂因其更高的灵活性和适应性,在复杂作业环境中的......
-
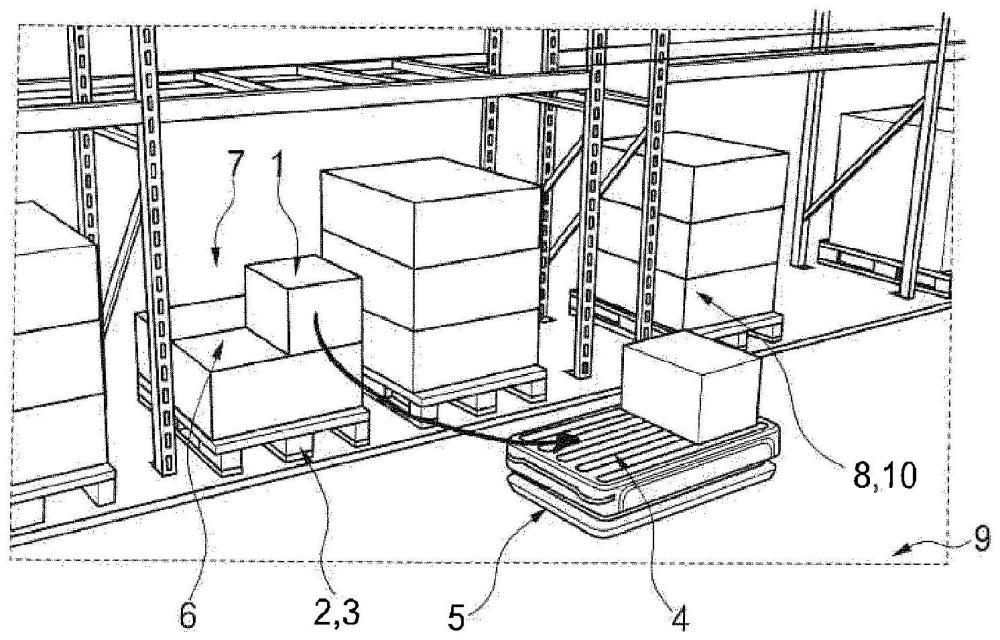
用于在变换的工作环境中对负载处理运动学装置的负载处理环境进行三维保险的系统和方法与流程
本发明涉及一种用于在变换的工作环境中对负载处理运动学装置的负载处理环境进行保险的系统、一种物流机器人和一种用于在变换的工作环境中对负载处理运动学装置的负载处理环境进行保险的方法,所述系统具有环境感测单......
技术新讯 > 运动学 > 列表
 2024-11-21
2024-11-21精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -
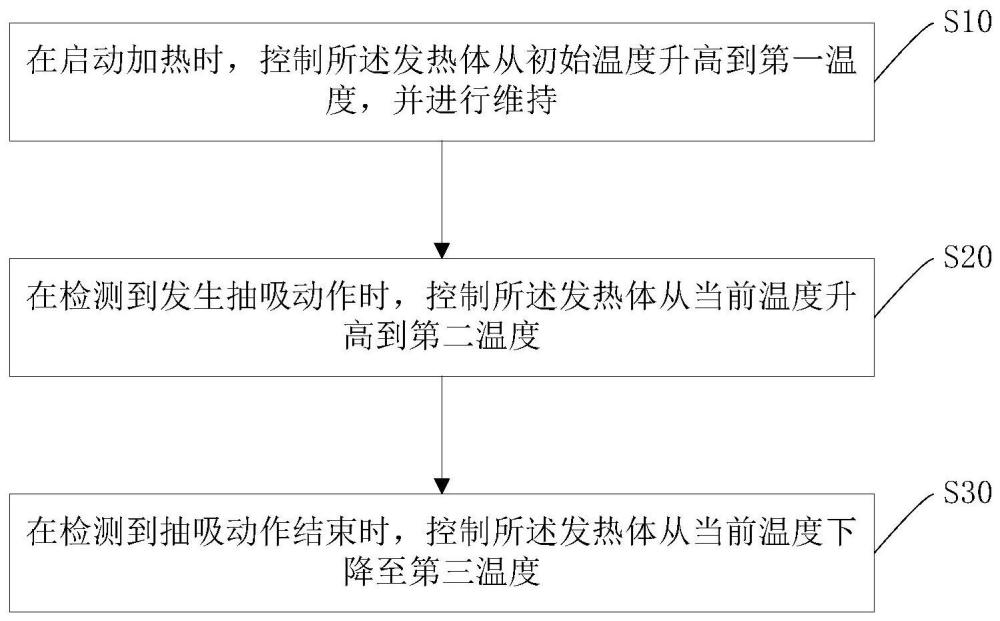
发热体、加热不燃烧装置及其加热控制方法与流程
2024-11-19 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01