基于CPS多尺度的城市道路交叉口交通控制方法
- 国知局
- 2024-10-15 09:59:48
本发明属于交通信息化领域,涉及一种基于信息物理系统(cyber-physicalsystems,cps)多尺度的城市道路交叉口交通控制方法。
背景技术:
1、交叉口是城市交通系统的关键节点。从交通流理论角度来看,交叉口作为典型的间断流设施,对交通流产生强制性阻断控制,信号灯通过在时间上隔离不同方向的车流,控制交叉口的运行秩序。交叉口作为城市交通系统的关键节点和交通控制的基本单元,承载着交通流的汇聚和分散功能,合理高效的交叉口控制系统对城市交通系统的高效、安全和可持续发展具有重要意义。信息物理系统能够融合感知和控制技术,描述交通中物理实体与信息虚体之间的动态演化关系,为构建网联环境下车路协同智能交通系统,解决城市交通管理问题提供了新的思路。
2、对于信号交叉口优化控制,目前国内外开展了大量研究并取得了一些重要进展,在交叉口通行效率、车辆通行延迟等方面较传统控制方案有所改善。但是,目前对交叉口信号控制的研究大多将交通信号和车辆控制的优化分别进行,缺少对车联网信息的有效利用,鲜有针对交叉口信号与车辆速度协同优化控制的研究。此外,尽管有少数研究针对信号和车辆速度开展联合优化,但是这些研究所提供的方法具有复杂的模型,需要大量的计算资源,限制了这些方法的进一步发展,相比之下更适用于规划和评估任务而非实时应用。因此,有必要从系统层面同时考虑信号灯的控制和车辆速度的优化,进一步探索研究满足实际交通应用需求的信号交叉口协同控制策略。
3、智能汽车信息物理系统是未来智能交通系统的新形态。智能汽车信息物理系统作为一种新兴的系统架构,将物理系统与信息系统深度融合,刻画了各种交通对象在物理系统和信息系统之间的相互映射、信息交互、反馈和执行关系,并准确描述了整个系统随时间动态演化的过程。对于复杂、强耦合的城市交通系统而言,智能汽车信息物理系统有助于准确把握和理解城市交通控制的内在机制和运行规律,能够有效促进智能交通生态体系的发展。
4、面对复杂、强耦合的城市交通系统,有必要从信息物理系统的视角和技术出发,结合智能网联汽车、云计算以及先进信息通信技术,研究城市交通信息因素与物理因素复杂交互和融合的作用机制,设计高效、环保的城市交通管理框架和控制算法。从信息物理系统的视角探索城市信号交叉口控制问题,有助于理解城市智能交通下车辆、信号灯以及智能控制平台的内在耦合机制,推动城市智能交通体系化发展。
5、基于以上原因,本发明设计了基于信息物理系统多尺度特征的城市交通控制框架,具有尺度间层次清晰、关联关系清楚、对象明确、易扩展等优势,能够广泛应用于满足实际交通应用需求的道路信号交叉口的协同控制。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于cps多尺度的城市道路交叉口交通控制方法。
2、为达到上述目的,本发明提供如下技术方案:
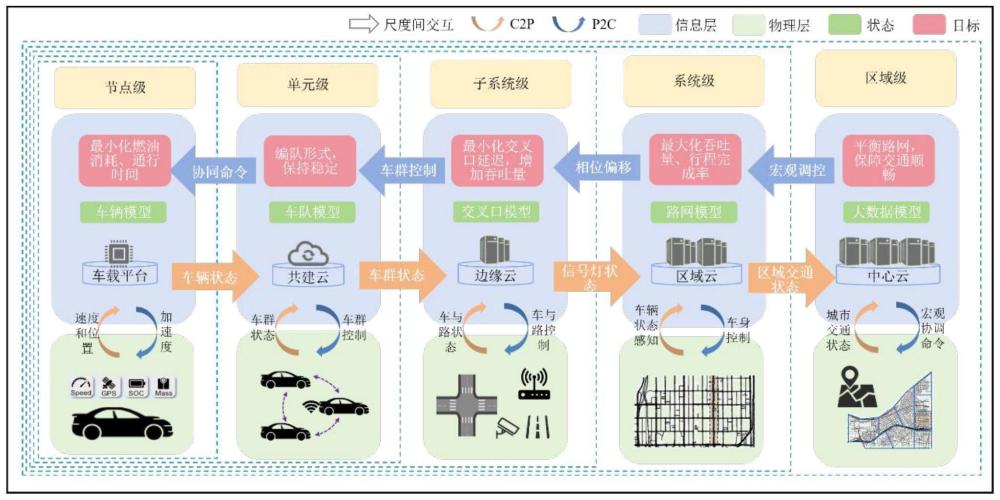
3、本发明提出的信息物理系统多尺度理论,针对城市交通控制问题,考虑尺度内和尺度间的交通动态、交互作用,设计了基于信息物理系统多尺度特征的城市交通控制框架。该框架将整个交通系统分为节点级、单元级、子系统级、系统级以及区域级五个不同尺度,各尺度系统服务的广度和实时性要求均有所不同:从节点级到区域级服务范围逐级扩大,实时性要求则逐级降低。同时,尺度间具有包含关系,多个较低级别尺度由较高级别的尺度统筹协调。例如,一个系统级尺度通常监督和控制一组子系统级尺度的活动。此外,该框架描述了每个尺度的尺度内状态、控制目标、以及信息层与物理层各要素的交互关系。根据控制的需求不同,该框架也可以灵活地进行扩展。
4、节点级智能汽车信息物理系统是整个复杂大系统的最小尺度,该尺度信息物理系统以单个智能汽车为视角,仅考虑车辆内部的组成部分与系统运行过程。节点级智能汽车信息物理系统必须具备可感知、可计算、可交互、可扩展和自决策功能,通过传感设备完成对自身车辆状态及周围环境信息的感知,将其映射到信息空间,并通过在信息空间中的计算、分析、决策,进而控制物理世界中的车辆实体,构建最基本的数据自动流动闭环,形成物理世界和信息世界的融合交互。
5、单元级智能汽车信息物理系统突破单车智能,采用车载自组织网络(vehicularad-hoc networks,vanets)的方式与周围车辆建立通信连接,它还进一步地将各自独立的信息空间通过网络的方式进行共享,使车辆之间演化出协同和自组织的功能。典型的单元级智能汽车信息物理系统是cav编队行驶。单元级尺度关注车群内的信息交互、协同控制。系统内各车辆的通信频率以及时机取决于当时的物理空间的状态,若状态相对稳定,则降低通信频率;若状态波动较大,则增加通信频率,共同完成协同任务。
6、子系统级智能汽车信息物理系统关注超视距的车群间、车与路段间的协同。系统包含一定规模的车辆,这使得仅靠局部车车通信、车车协同的方式,将不能满足全局范围内的优化控制,车队内繁重的感知和计算任务需要通过v2i实现与边缘云的连接以支持其任务卸载。此外,系统也包含路段及其附属基础设施(空间范围通常为50至300米),典型的路段包括交叉口及信号灯、合流区、隧道等,在对子系统级智能汽车信息物理系统进行分析时,需充分考虑车辆与路段的相互作用。子系统级尺度主要关注车群、路段以及边缘云的互联互通形成的局部范围内闭环通信链路及融合控制。除此之外,子系统级尺度控制的形式也发生改变,在节点级智能汽车信息物理系统中,系统直接控制车辆底盘系统,而在子系统级智能汽车信息物理系统中,系统的控制转变为对最终状态的指定,不会直接指定车辆的具体动作过程。
7、系统级智能汽车信息物理系统由多个子系统级智能汽车信息物理系统和区域云组成,系统的空间范围扩大为300至5000米,达到路网级别,包含若干个信号交叉口;时间范围扩大到10至20s,因此在这一级系统提供更长的计算与决策时间。对于系统内的区域云及边缘云,它们之间通过有线通信的方式建立连接,可传输大量信息用以共享局部交通状态和决策信息。
8、区域级智能汽车信息物理系统可以通过中心云及大数据平台实现跨系统、跨平台的互联、互通和互操作,促成了多源异构数据的有效集成、交换和共享,在城市范围内实现信息全面感知、深度分析、科学决策和精准执行。该层级系统关注城市范围内交通态势的宏观调控,负责对道路资源进行分配与协调,以实现城市各区域和路段交通压力的平衡,确保交通顺畅。
9、通过对智能汽车信息物理系统进行尺度划分,能够更加地清晰地划分系统边界,深入理解系统的构成及其运作机制,实现高内聚、低耦合的系统解耦,聚焦研究对象。
10、在所设计城市交通控制框架中,各个尺度的信息层具有不同的结构,所提供的服务也不相同:
11、节点级系统的车载计算平台指车机及其配备的实时计算技术,主要运行自动驾驶或辅助驾驶应用程序,为车辆提供强实时性的行车和安全服务,是实现单车智能、自主决策的重要一环;
12、单元级系统的共建云是指该尺度下突破单车智能,车辆采用网联的方式与周围车辆建立稳定通信连接,将各自独立的信息空间通过网络通信的方式得以共享,实现车辆之间的融合感知和协同控制,主要运行较强实时性的车辆协同服务,例如编队行驶等;
13、子系统级的边缘云包括移动边缘计算(mobile edge computing,mec)和实时缓存技术,主要运行具有弱实时需求的协作应用程序,面向用户提供云控应用基础服务;
14、系统级的区域云提供并行计算和广域通信,主要运行区域级范围的非实时协作应用,向交通运输和交通管理部门提供交通监管、执法等云控应用的基础服务,并面向区域内的各个边缘云提供宏观协调服务;
15、区域级系统受益于中心云的高性能计算和大数据存储,运行服务于整个城市的非实时应用程序,主要面向交通管理部门、政府部门、车辆生产与制造企业、高校及科研单位,为其提供宏观交通数据分析与基础数据增值服务。
16、本发明对于所提出的信息物理系统多尺度城市交通控制问题,建立适用于所提出框架的通用优化模型。设m表示所有的尺度,m∈m且m=1为时空范围最小的尺度,m=m为时空范围最大的尺度。设km为尺度m下的任一离散时刻,任意两时刻km-1(m≥1)与km之间的时间间隔为δtm。由于不同尺度实时性要求不同,因此δtm的值不同。对于不同尺度间的时间间隔δtm(m∈m),存在δt1<δt2<…<δtm,对应到本文前面所提出的多尺度问题,则尺度m=1代表节点级智能汽车信息物理系统,尺度m=m代表区域级智能汽车信息物理系统。此外,xm(km)表示在m尺度下第km时刻的系统状态,例如车辆的位置、加速度、信号灯状态等。um(km)表示在m尺度下第km时刻的控制变量,例如车辆的加速度、信号灯的相位切换等。综上,多尺度信息物理系统城市交通控制问题的一般公式可以离散形式表示为q0:
17、
18、满足约束:
19、
20、方程(1)为整个多尺度问题的系统目标函数,αm为目标函数中第m尺度目标的权重,并服从式(2)的约束。在式(2)中,第一个方程表示尺度内系统状态的转移,状态的转移遵从尺度内的运动学定律如牛顿第二定律、能量守恒定律等。此外,在本研究中可以认为相邻尺度间的相互作用远大于其他尺度间相互作用,因此做出适当简化处理,忽略非相邻尺度之间的相互作用,即尺度m主要受到m-1(m≥0)与m+1尺度的影响,并用式(2)中第二个方程进行表示相邻尺度间的相互作用。式(2)第三个方程中x(km=0)为矢量,表示整个系统各个尺度的初始状态。式(2)第四个方程为系统状态和控制的极限约束,例如因发动机功率等因素导致车辆最大速度、最大加速度受到限制。式(2)第五个方程为系统中其它为满足实际场景需求而设置的约束,例如交通信号灯同一时间只能有一个绿灯相位。
21、本发明所建立的通用优化模型q0显然是多尺度的:首先,在不同的尺度m下,δtm表示的时间间隔从毫秒级到分钟级不等,因此在时间域是多尺度的;其次,对于尺度m,所涉及到的系统状态xm(km)和控制变量um(km)都限定在特定地理区域内,例如车辆、信号交叉口、路网等,因此在空间范围内是隐含的多尺度。
22、本发明的有益效果在于:本发明能够很好地描述尺度内和尺度间信息流动的过程。在单个尺度内,通过融合感知真实的物理实体如道路环境、车辆状态、信号灯相位并经汽车总线或v2x通信技术(依据尺度不同,通信方式有所不同)传输到基础平台,在基础平台经过初步处理后,最终以数字信息的形式在信息层进行实时映射和重构,完成cps数据流动闭环中物理层到信息层(physical to cyber,p2c)的过程,是信息空间对物理空间正确反映的体现。
23、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
本文地址:https://www.jishuxx.com/zhuanli/20241015/316051.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表