一种考虑执行性能差异的船舶动力定位事件触发控制方法
- 国知局
- 2024-11-21 12:05:44
本发明涉及自适应控制的动力定位船舶装备应用,尤其涉及一种考虑执行性能差异的船舶动力定位事件触发控制方法。
背景技术:
1、动力定位船舶广泛应用于石油钻井平台或科研船,且一般配备有包括侧推进器和全回旋推进器在内的多台推进器,在施加海洋环境干扰条件下能够稳定在期望位置。
2、实际作业中,动力定位船舶可能遭遇较大风浪,对自适应控制器的设计提出了强鲁棒性的要求,此外,为了实现对误差的镇定,从控制器发送至执行器的控制信号为连续信号,若采用固定频率的信号零阶保持器(zoh)则可以降低信号传输频率,但却削弱了控制效果。现有的研究成果主要采用传统的事件触发机制,降低了从控制器到执行器的通讯负载,但是,从传感器到执行器的通讯负载却没有得到缓解。此外,现有研究成果未考虑不同执行器的执行效果差异,这显然不利于应用于工程实际。
3、基于以上分析,基于传统事件触发机制的动力定位控制算法主要存在以下2点缺陷:
4、1)传统事件触发机制虽减轻了控制器与执行器之间的信号传输压力,但传感器与控制器之间仍然传输连续信号,系统的信号传输压力并未得到彻底缓解,这显然不利于工程实际。
5、2)在航海实际中,全驱动船一般配备有包括主推进器、侧推进器、全回旋推进器在内的多个执行器。由于执行器之间存在执行性能差异,其对控制效果的影响相互耦合,严重削弱控制系统的输出性能。
技术实现思路
1、本发明公开了一种考虑执行性能差异的船舶动力定位事件触发控制方法,以克服上述技术问题。
2、为了实现上述目的,本发明的技术方案是:
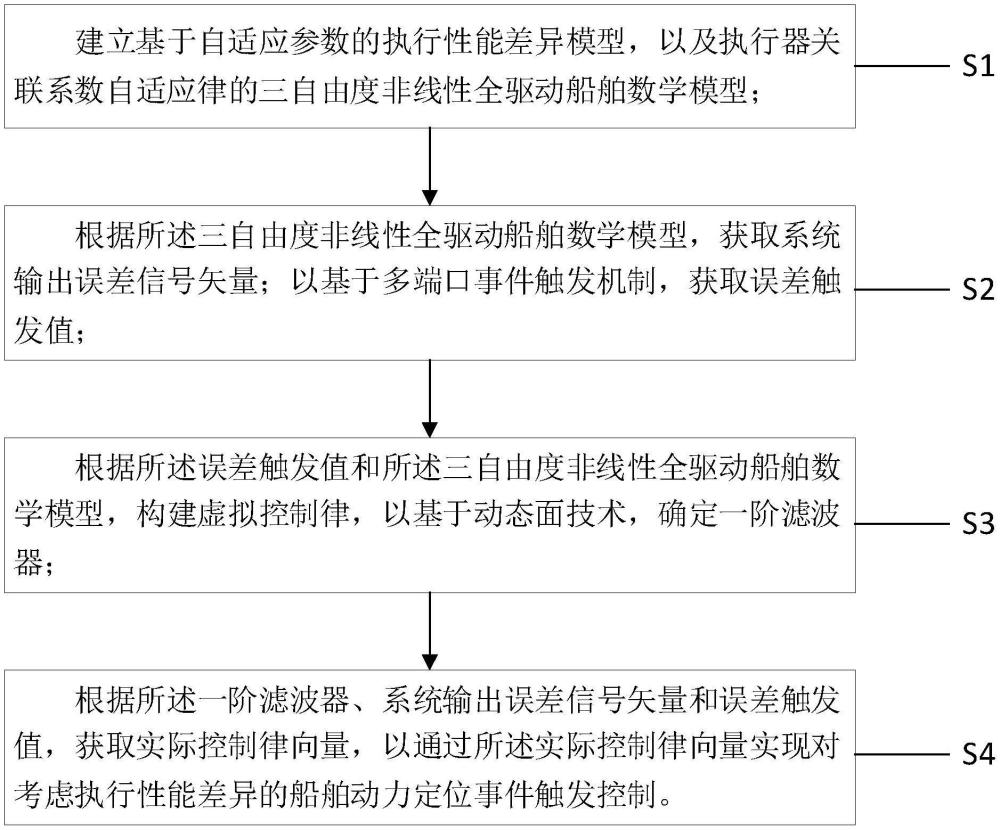
3、一种考虑执行性能差异的船舶动力定位事件触发控制方法,包括如下步骤:
4、s1:建立基于自适应参数的执行性能差异模型,以及执行器关联系数自适应律的三自由度非线性全驱动船舶数学模型;
5、s2:根据所述三自由度非线性全驱动船舶数学模型,获取系统输出误差信号矢量;以基于多端口事件触发机制,获取误差触发值;
6、s3:根据所述误差触发值和所述三自由度非线性全驱动船舶数学模型,
7、构建虚拟控制律,以基于动态面技术,确定一阶滤波器;
8、s4:根据所述一阶滤波器、系统输出误差信号矢量和误差触发值,获取实际控制律向量,以通过所述实际控制律向量实现对考虑执行性能差异的船舶动力定位事件触发控制。
9、进一步的,获取实际控制律向量方法如下;
10、
11、其中,αup=(αx,αy,αψ)t
12、式中:φ(ξ)为鲁棒神经阻尼项,φξ表示鲁棒神经放缩量,φξ=1+||sξ(ξ)||||βξ||;||sξ(ξ)||f表示基函数范数;αx表示前进控制律;αy表示横漂控制律;αψ表示艏摇控制律;kξn为神经阻尼设计矩阵,为对角阵形式且元素全为正;kξe为速度镇定矩阵;αup表示实际控制律向量。
13、进一步的,所述三自由度非线性全驱动船舶数学模型建立如下:
14、
15、
16、式中:表示船舶的姿态矢量,其中,x,y,ψ分别表示惯性坐标系下的船舶位置的横坐标、船舶位置的纵坐标和船舶的艏向角;t表示矩阵或矢量的转置;表示三维矢量空间;r(ψ)为旋转矩阵;
17、表示速度矢量,其中,u,v,r分别表示船舶的前进速度、横漂速度和艏摇角速度;m表示惯性矩阵;表示η的一阶导数;表示ξ的一阶导数;n(ξ)ξ为动力定位船舶未知的非线性项;为操船力矩矢量,其中τu,τv,τr分别表示纵向推力、横向推力和转船力矩;dω表示海洋环境干扰,其中,dw=[dwu,dwv,dwr]t,dwu表示前进运动环境干扰;dwv表示横漂运动环境干扰;dwr表示艏摇运动环境干扰;
18、其中,
19、
20、
21、τ=t(γ)κ(n)up
22、式中:m表示动力定位船舶的质量;表示前进加速度水动力导数;
23、表示横漂加速度水动力导数;yr表示耦合速度水动力导数;表示耦合加速度水动力导数;xg表示船舶质心距附体坐标系原点距离;nr表示艏摇速度水动力导数;iz表示动力定位船舶的惯性矩;|·|表示绝对值运算;
24、t(γ)为执行器的位置矩阵;κ(n)为执行器的增益矩阵;up为直接控制输入向量,up=[up1,up2,...,upq,...,upq]t,其中,q为等效推进器,即执行器的数量,upq=pq|pq|表示第q个等效推进器的直接控制输入向量;pq是第q个等效推进器的螺距比,q=1,2,…,q表示等效推进器的索引编号;
25、其中,直接控制输入向量up根据如下基于自适应参数的执行性能差异模型获取:
26、式中:kp为执行效果矩阵;γp为中间输入,为执行偏差向量;
27、令gp=k(n)kp,则令θ=λsup{μ}l;
28、式中:gp为效果增益矩阵;μ为偏差增益向量;θ为放缩向量,λ为效果补偿矩阵,k(n)表示执行器的增益矩阵;kp为执行效果矩阵;为执行偏差向量;l表示元素全为1的q行列向量,其中,l=(1,1,...,1)t;sup{μ}表示对μ的元素取下限;
29、则,引入自适应参数,对效果补偿矩阵λ和放缩向量θ进行估计,因此中间输入γp为:
30、
31、
32、式中:γp为设计的中间输入,分别为效果补偿矩阵λ中对应的第1个,第2个,…,第q个,…,第q个等效执行器的元素的自适应参数,分别为放缩向量θ中对应的第1个,第2个,…,第q个,…,第q个等效执行器的元素的自适应参数;q为等效推进器的数量;为t(γ)的伪逆矩阵;t(γ)为执行器的位置矩阵;αup表示实际控制律向量;θ表示双曲正切矢量;t1(γ)表示t(γ)的第1列向量;tq(γ)表示t(γ)的第q列向量;ε表示双曲正切小量;ξe表示速度误差向量;
33、ξe=βξ-ξ
34、式中:ξe表示触发速度误差向量;βξ表示一阶滤波器;ξ表示速度矢量;
35、其中,建立如下执行器关联系数自适应律,获取效果补偿矩阵λ和放缩向量θ的元素的自适应参数:
36、
37、
38、式中:γλq,γθq,σλq,σθq均为设计参数,分别为和的初始值;分别为和的一阶导数;表示的q行b列的元素,taq(γ)表示t(γ)的a行q列元素,表示第a行q列的元素,ξea表示ξe的第a个元素,αupb表示αup的第b个元素;γλq表示第q个等效推进器的λ增益参数,γθq表示第q个等效推进器的θ增益参数,σλq表示第q个等效推进器的λ收敛参数,σθq表示第q个等效推进器的θ收敛参数。
39、进一步的,所述误差触发值获取如下:
40、首先获取系统输出误差信号矢量ηe如下:
41、
42、ηe=(xe(t),ye(t),ψe(t))t
43、式中:xe(t),ye(t),ψe(t)分别表示t时刻的惯性坐标系下的船舶的位置的横坐标误差、纵坐标误差和艏向误差;分别表示在tk-tk+1区间内船舶的位置的横坐标误差的触发值、纵坐标误差的触发值和艏向误差的触发值;和分别表示船舶的位置的横坐标误差的触发时刻、纵坐标误差的触发时刻和艏向误差的触发时刻;k表示时刻的索引编号;ηe表示系统输出误差信号矢量;
44、则误差触发值为:
45、
46、式中:表示误差触发值;kt表示触发矩阵,
47、kt=diag{1+λ1xδx,1+λ1yδy,1+λ1ψδψ};diag{·}表示取对角运算;λ1x,λ1y,λ1ψ,λ2x,λ2y,λ2ψ均为触发边界参数;ζx表示前进触发增量阈值;ζy表示横漂触发增量阈值;ζψ表示艏摇触发增量阈值。
48、进一步的,所述多端口事件触发机制的触发规则如下:
49、
50、式中:inf{·}表示求下界运算;δx表示前进触发系数阈值;δy表示横漂触发系数阈值;δψ表示艏摇触发系数阈值;ζx表示前进触发增量阈值;ζy表示横漂触发增量阈值;ζψ表示艏摇触发增量阈值。
51、进一步的,所述虚拟控制律构建如下:
52、
53、式中:αξ表示虚拟控制律;r-1(ψ)为旋转矩阵的逆矩阵;kη为姿态镇定矩阵;表示误差触发值;
54、根据虚拟控制律αξ,基于动态面技术,确定一阶滤波器βξ,所采用公式如下:
55、
56、式中:tξ为时间常数矩阵,其中tξ=diag{t1,t2,t3},diag{·}表示取对角运算,t1,t2,t3分别表示时间常数矩阵对角线上的第一个分量、第二个分量和第三个分量;βξ表示一阶滤波器;表示βξ的一阶导数;βξ(0)表示一阶滤波器的初始值;αξ(0)表示虚拟控制律的初始值。
57、有益效果:本发明的一种考虑执行性能差异的船舶动力定位事件触发控制方法,根据基于自适应参数的执行性能差异模型,以及执行器关联系数自适应律的三自由度非线性全驱动船舶数学模型,获取系统输出误差信号矢量;以基于多端口事件触发机制,获取误差触发值;进而构建虚拟控制律,并基于动态面技术,确定一阶滤波器;最终获得实际控制律向量,实现对船舶动力定位事件触发的控制。本发明能够解决执行性能差异问题中的船舶动力定位自适应控制方法,通过引用多端口事件触发机制,降低系统的信号传输压力;同时还考虑了执行器的执行性能差异,通过设计的执行器关联系数自适应律不断补偿未知的差异和执行器增益,使得本发明更接近于航海实际和工程应用,对智能化动力定位船舶走向工程应用具有理论指导意义。
本文地址:https://www.jishuxx.com/zhuanli/20241120/334266.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。