一种基于改进YOLOv5s的失效航天器部件检测方法
- 国知局
- 2024-12-06 12:12:29
本发明涉及目标检测方法,具体涉及一种基于改进yolov5s的失效航天器部件检测方法。
背景技术:
1、失效航天器在轨道上的存在不仅浪费了宝贵的轨道资源,还潜在地威胁到空间安全。失效的航天器可能会因为自然冲击、意外情况和燃料耗尽等因素失去控制,成为不可合作的目标。这些失效航天器随时可能解体,产生碎片,给空间任务和其他在轨航天器带来安全隐患。因此,需要对失效的航天器进行有效的捕获或维护。
2、捕获任务的关键在于识别航天器的关键部件,如太阳能帆板、雷达天线等,而在轨维护任务则需要识别航天器的大尺度全局部件,如航天器本体和对接面。因此,失效航天器的局部分量和全局分量的检测和识别是一个重要的工程问题。
3、光学成像技术因其目标检测直观、成像分辨率高、信息量大等优点,适用于捕获阶段检测失效航天器部件。在光学图像中,失效航天器部件的检测属于计算机视觉中的目标检测领域。目前,基于光学图像的航天器成分检测方法主要分为两大类:传统目标检测方法和基于卷积神经网络(cnn)的目标检测方法。
4、传统的目标检测方法主要是基于点、线、圆特征的拟合。然而,不同的光照条件或目标需要设置不同的拟合参数,适应性较差,并且需要进行复杂的图像预处理操作。随着深度学习技术的发展,基于cnn的目标检测方法在局部部件的检测中取得了较好的效果,如自动驾驶汽车遮挡目标检测和材料表面缺陷检测等。
5、现阶段,对航天器检测与识别的研究大多集中在航天器整体轮廓的检测上,对局部关键部件(如太阳能帆板、天线和雷达)的检测研究较少报道。此外,光学图像中失效航天器部件检测方法主要面临两个问题:
6、(1)照度问题:空间暗背景环境下拍摄的图像亮度低、对比度差、噪点多,严重影响图像质量和观感,导致目标信息淹没在噪声中,降低了检测器的性能;
7、(2)运动状态问题:在航天器运动中拍摄的图像容易抖动模糊,给关键部件的识别带来困难,限制了航天器关键部件的检测。
8、这些问题常常导致失效航天器关键部件的漏检或误检。因此,研究高效、鲁棒的航天器部件检测方法具有重要意义。
技术实现思路
1、本发明的目的是解决现阶段对航天器检测与识别的研究大多集中在航天器整体轮廓的检测上,缺少对对局部关键部件的检测研究,以及光学图像中失效航天器部件检测方法由于照度问题、运动状态问题常常导致失效航天器关键部件的漏检或误检的不足之处,而提供一种基于改进yolov5s的失效航天器部件检测方法。
2、为了解决上述现有技术所存在的不足之处,本发明提供了如下技术解决方案:
3、一种基于改进yolov5s的失效航天器部件检测方法,其特殊之处在于,包括如下步骤:
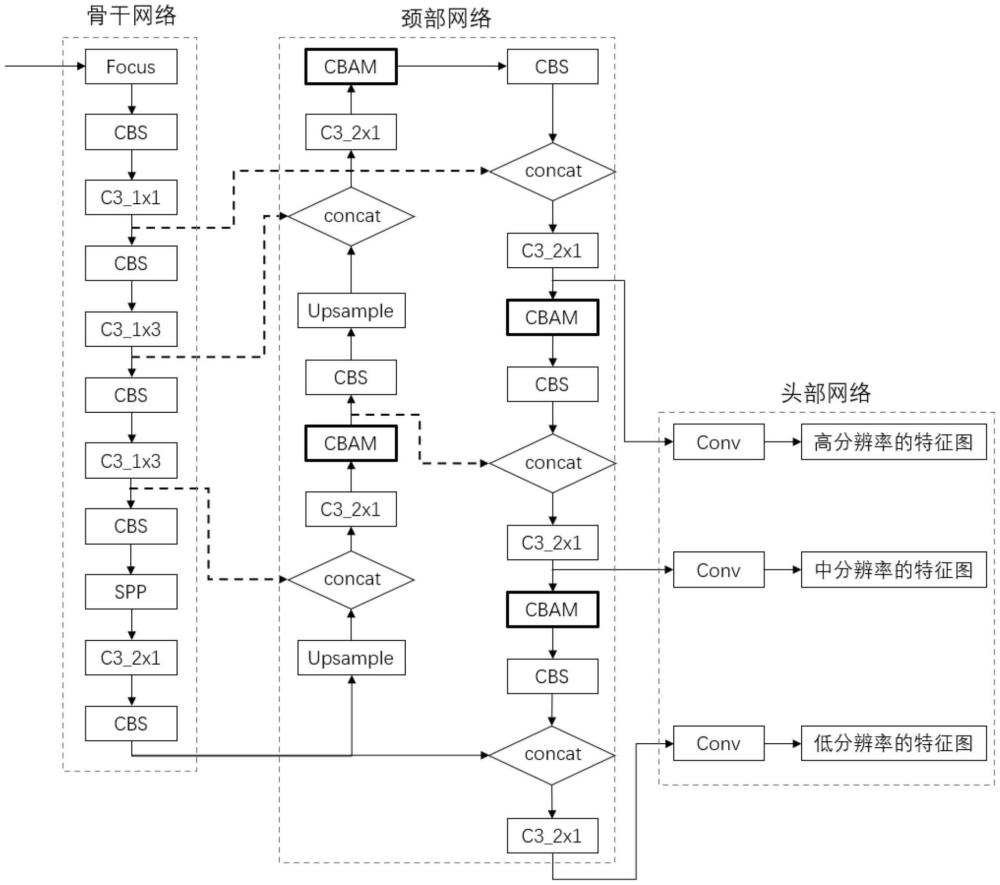
4、步骤1、在yolov5s中颈部网络内每个依次连接的c3模块与cbs之间均设置依次连接的cam(channel attention module,通道注意力模块)和sam(spatial attentionmodule,空间注意力模块),使c3模块的输出端连接cam的输入端,sam的输出端连接cbs的输入端,得到初始的目标检测网络;所述依次连接的cam和sam构成cbam(convolutionalblock attention module,注意力机制模块);
5、步骤2、利用待检测失效航天器的模型在实验室暗室环境采集失效航天器图像,对采集的失效航天器图像进行数据增广,划分为训练集、验证集,并对训练集、验证集进行图像标注;
6、步骤3、将步骤2得到的训练集、验证集输入到步骤1初始的目标检测网络中进行训练,得到训练好的目标检测网络;
7、步骤4、建立多阶段图像增强网络,通过其对待检测数据集中的待检测失效航天器图像进行图像增强,得到增强后待检测失效航天器图像,构成增强后待检测数据集;
8、所述多阶段图像增强网络包括阶段一模块、阶段二模块和阶段三模块,所述阶段一模块包括依次连接的阶段一conv(卷积)、阶段一cab(channel attentionblock)、阶段一u-net和阶段一监督注意模块;所述阶段二模块包括依次连接的阶段二conv、阶段二cab、阶段二拼接模块、阶段二u-net和阶段二监督注意模块;所述阶段三模块包括依次连接的阶段三conv一、阶段三cab、阶段三拼接模块、阶段三orsnet(original resolution sensingnetwork)和阶段三conv二;
9、所述阶段一conv的输入为由待检测失效航天器图像分解得到的多个子图像,阶段一u-net的第一输出端连接阶段一监督注意模块的第一输入端,第二输出端连接阶段二u-net的第二输入端,阶段一监督注意模块的第二输入端用于输入ground-truth图像,第一输出端用于输出阶段一恢复图像,第二输出端连接阶段二拼接模块;
10、所述阶段二conv的输入为阶段一恢复图像;所述阶段二拼接模块用于将阶段二cab的输出与阶段一监督注意模块的输出逐通道拼接;所述阶段二u-net的第一输出端连接阶段二监督注意模块的第一输入端,第二输出端连接阶段三orsnet的第二输入端,阶段二监督注意模块的第一输出端用于输出阶段二恢复图像,第二输出端连接阶段三拼接模块;
11、所述阶段三conv一的输入为阶段二恢复图像;所述阶段三拼接模块用于将阶段三cab的输出与阶段二监督注意模块的输出逐通道拼接,所述阶段三orsnet包括n个依次连接的orb(original resolution block,原始分辨率块),用于处理图像,以保留精细的空间细节;所述阶段三conv二的输出用于与阶段二恢复图像逐元素相加得到阶段三恢复图像,作为增强后待检测失效航天器图像,构成增强后待检测数据集;
12、步骤5、将步骤4得到的增强后待检测数据集输入到步骤3训练好的目标检测网络中,得到失效航天器部件的分类与定位结果,并利用map(平均精度)、recall(召回率)进行评价,完成失效航天器部件检测。
13、进一步地,步骤1中,所述初始的目标检测网络包括骨干网络(backbone)、颈部网络(neck)和头部网络(head);所述颈部网络包括依次连接的第一个upsample(上采样)、第一个concat(拼接)、第一个c3_2x1、第一个cbam、第一个cbs、第二个upsample、第二个concat、第二个c3_2x1、第二个cbam、第二个cbs、第三个concat、第三个c3_2x1、第三个cbam、第三个cbs、第四个concat、第四个c3_2x1、第四个cbam、第四个cbs、第五个concat、第五个c3_2x1;第一个cbam输出端还连接颈部网络中第四个concat的输入端。
14、进一步地,所述步骤2具体为:
15、步骤2.1、将待检测失效航天器的模型作为目标,采用led光源模拟太阳光入射光,采用设置在滑轨上的移动车和设置在移动车前端的观测相机模拟观测航天器;
16、步骤2.2、使太阳光入射光以0°~90°的入射角照射目标,使观测航天器沿直线在距离目标预设范围内以均速向目标移动以模拟接近阶段,同时采集目标的抖动模糊图像;使太阳光入射光以0°~90°的入射角照射目标,使观测航天器在距离目标固定距离处以模拟悬停阶段,同时采集目标的噪声图像;采集完成后,将抖动模糊图像和噪声图像作为失效航天器图像;
17、步骤2.3、对步骤2.2采集的失效航天器图像进行数据增广,并划分为训练集、验证集;然后对训练集、验证集进行图像标注,标注目标包括航天器太阳能帆板和航天器本体。
18、进一步地,步骤2.2中,所述预设范围为0.5m~5m。
19、进一步地,所述步骤4具体为:
20、步骤4.1、建立多阶段图像增强网络;
21、步骤4.2、将多个由待检测失效航天器图像分解得到的子图像依次通过阶段一conv进行初步卷积处理、阶段一cab增强特征表达、阶段一u-net进一步恢复和增强图像细节,最后通过阶段一监督注意模块与多个由待检测失效航天器图像分解得到的子图像进行监督学习,以改进恢复质量,输出阶段一恢复图像;
22、步骤4.3、将阶段一恢复图像依次通过阶段二conv进行初步卷积处理、阶段二cab增强特征表达、阶段二拼接模块与阶段一监督注意模块的输出逐通道拼接、阶段二u-net进一步恢复和增强图像细节,最后通过阶段二监督注意模块与输出阶段二恢复图像;
23、步骤4.4、将阶段二恢复图像依次通过阶段三conv一进行初步卷积处理、阶段三cab增强特征表达、阶段三拼接模块与阶段二监督注意模块的输出逐通道拼接,然后输入阶段三orsnet,通过n个依次连接的orb处理图像,保留和增强图像的精细空间细节,最后通过阶段三conv二进行卷积操作,再与阶段二恢复图像逐元素相加,得到阶段三恢复图像,作为增强后待检测失效航天器图像,构成增强后待检测数据集,n为大于1的整数。
24、进一步地,所述步骤3具体为:
25、步骤3.1、设置训练超参数,包括训练周期(epoch)、学习率(learning rate)、动量(momentum)、批量大小(batch size)、训练框架;
26、步骤3.2、将步骤2得到的训练集输入到步骤1初始的目标检测网络中计算输出的预测结果;使用损失函数计算预测结果与真实标注之间的训练损失;根据训练损失进行梯度反向传播,并通过优化器更新网络的权重和偏置;
27、步骤3.3、对步骤2得到的验证集进行一次前向传播计算,计算所有验证样本损失的平均值作为验证损失;
28、步骤3.4、记录训练损失和验证损失,评估模型的训练效果;评估指标包括map、recall和precision(准确率);
29、步骤3.5、重复步骤3.2至步骤3.4,直至达到预定的训练周期,或者训练损失和验证损失达到预设条件。
30、与现有技术相比,本发明的有益效果是:
31、(1)本发明一种基于改进yolov5s的失效航天器部件检测方法,首先针对空间环境复杂背景下图像噪声和运动模糊的问题,在yolov5s的颈部网络结构中加入了cbam(cam和sam),从通道和空间两个维度强化目标的重要特征,提升网络对目标的关注度,提高目标检测精度;其次针对缺少空间环境复杂背景下检测统一数据,在实验室的暗室环境中,采集失效航天器模型的图像建立训练集和验证集,用于训练初始的目标检测网络;最后利用多阶段图像增强网络对待检测的失效航天器图像进行处理,增强图像的细节和对比度,提高图像的质量,提高了目标检测的精度和鲁棒性,特别适用于复杂环境下失效航天器部件的精确检测。
32、(2)本发明实现了map 77.32%,recall 85.88%;与原始的yolov5s相比,本发明提出的方法在map平均提升了4.9%;多组实验表明,本发明融合了图像恢复和改进的yolov5s,对空间环境下拍摄图像噪声和抖动模糊具有良好的检测效果。
33、(3)本发明中目标检测网络在yolov5s的颈部网络中的每个依次连接的c3模块与cbs之间增加了一个cbam;即在两次特征融合之间,增加注意力机制,来提升网络对目标的关注度;增加cbam后的网络,在进行下一次特征融合之前,先对特征图进行特征加强操作,使网络忽略无关信息的干扰,着重关注关键特征,并将相对重要的特征加以融合;这样不仅使融合后的特征图包含更多有效信息,提高目标定位精度,还可以达到降低计算量,提升模型速度的目的。
本文地址:https://www.jishuxx.com/zhuanli/20241204/339955.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。