一种仿生青蛙弹跳结构
- 国知局
- 2024-12-06 12:15:37
本发明涉及仿生青蛙的弹跳,更具体地说,涉及一种仿生青蛙弹跳结构。
背景技术:
1、仿生青蛙是指在仿生学领域中,设计者借鉴青蛙的特性和机能来设计和制造机械装置或系统的过程。青蛙拥有多种独特的生物特征和行为,尤其青蛙以其出色的跳跃能力而闻名,所以目前研究青蛙的跳跃能力,以开发具有类似跳跃能力的机器人,可用于探索复杂地形或执行特定任务。其中在一些创新大赛中也会经常有仿生青蛙的项目,鼓励学生和研究人员利用生物学原理和技术手段,创造出具备青蛙跳跃等功能的创新作品。
2、当前的仿生青蛙的跳跃结构会配合其储能结构实现跳跃操作,但是目前仿生青蛙的重量和尺寸较大,且在其有限储能的条件下,仿生青蛙跳跃的距离较短,且结构较为复杂,设计和制作成本较高,无法达到青蛙跳跃的生物特性,跳跃效果不佳。
3、因此,有必要提供一种仿生青蛙弹跳结构解决上述技术问题。
技术实现思路
1、本发明的目的在于提供一种仿生青蛙弹跳结构以解决上述技术问题。
2、为实现上述目的,本发明采用如下的技术方案:
3、一种仿生青蛙弹跳结构,包括:
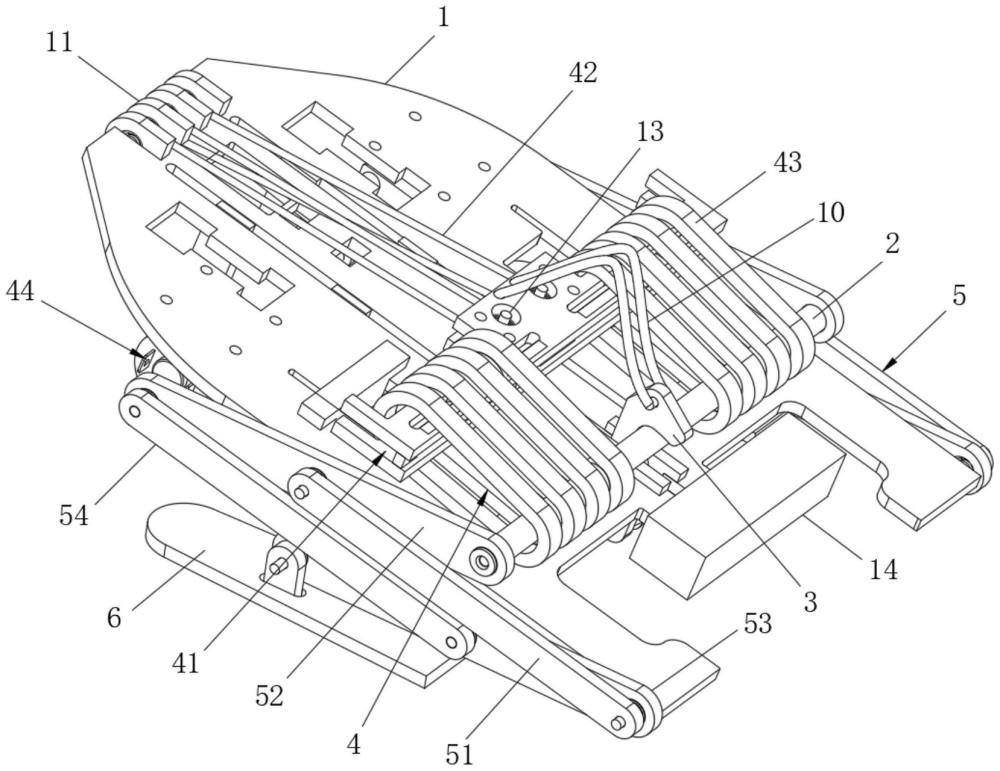
4、仿生蛙体,所述仿生蛙体上方设有主动杆;
5、限位脱钩,设于所述仿生蛙体上,用于对所述主动杆进行限制;
6、储能部件,设于所述仿生蛙体,用于使得所述主动杆脱离所述限位脱钩的限制并进行移动;
7、弹跳部件,设有两个且对称设于所述仿生蛙体上,且两个所述弹跳部件分别与所述主动杆的两端相连,当所述主动杆脱离所述限位脱钩发生移动时,会带动所述弹跳部件进行弹跳。
8、进一步的,所述弹跳部件包括:
9、上横杆,其两端均通过轴转动设于所述仿生蛙体的侧面,所述上横杆的两端分别转动设置有大腿杆和小腿杆,所述大腿杆的一端与所述主动杆相连;
10、下横杆,其一端通过轴转动设于所述大腿杆的另一端,所述下横杆的另一端通过轴与所述小腿杆转动相连。
11、进一步的,所述仿生蛙体的下方还设有脚蹼板,所述脚蹼板上设置有支板,所述支板上转动设有转杆,所述小腿杆远离所述上横杆的一端与所述转杆相连。
12、进一步的,所述储能部件包括:
13、排剑,设于所述仿生蛙体的上方,所述排剑上连接有滑轮绳索;
14、弹性件,其两端分别套设于所述排剑和所述主动杆上;
15、驱动组件,设于所述仿生蛙体的下方,通过和所述滑轮绳索的配合带动所述排剑移动。
16、进一步的,所述仿生蛙体上设置有脱钩支架,所述脱钩支架上转动设置有脱钩轴,所述限位脱钩与所述脱钩轴相连,所述限位脱钩上设有钩绳,所述钩绳的另一端与所述排剑相连。
17、进一步的,所述驱动组件包括对称设置在所述仿生蛙体底部的两个驱动件,所述驱动件的输出端设有驱动轴,所述滑轮绳索的两端分别与两个所述驱动轴相连。
18、进一步的,所述仿生蛙体上设置有滑轮套,所述滑轮套上转动设置有定滑轮,所述排剑上设有动滑轮,其中一个所述驱动轴上的所述滑轮绳索的另一端依次来回穿过各个所述定滑轮和动滑轮后与另一个所述驱动轴相连。
19、进一步的,根据权利要求6所述的一种仿生青蛙弹跳结构,其特征在于,所述仿生蛙体上还设有蓄电池,所述蓄电池与所述驱动件电性连接。
20、相比于现有技术,本发明的有益效果在于:
21、1、本方案中将储能部件释放能量后,主动杆快速移动时会对弹跳部件进行作用,弹跳部件则会迅速弹跳,带动整体仿生青蛙本身进行跳跃,该仿生青蛙的整体以四十五度弹射出去,通过弹跳部件巧妙设计以及储能部件的配合,使得仿生青蛙整体的重量和尺寸较小,同时通过弹跳部件模仿青蛙的腿部骨骼运动,在保证该仿生青蛙跳跃可靠性的基础上,尽可能地减少重量实现轻量化设计,进而能实现更高效的跳跃运动,结构简单巧妙,设计和制作的成本较低,可有效达到青蛙跳跃的特性,跳跃效果好。
22、2、本方案中限位脱钩其内侧的凹槽由两段圆弧光滑相连而成,其中靠内一段圆弧为与主动杆的外侧相切的一段圆弧,靠外侧的一段圆弧则是以脱钩轴的轴心为旋转中心c,以c到主动杆的轴心b的距离为半径作的一段圆弧,这两段圆弧光滑连接,同时与以大腿杆中心为旋转中心a,以a到主动杆的轴心b的距离为半径作的圆弧相交,该结构可使得限位脱钩放置在主动杆的堵点位置,使得该仿生青蛙在储能阶段,可以阻止主动杆移动,弹性件能进行有效拉伸,获得更多的储能;而且在储能释放的瞬间,限位脱钩可以沿着脱钩轴转动得以顺利解脱,瞬间释放。
23、3、本方案中当储能释放后,主动杆则会带动大腿杆进行旋转,进而会带动下横杆和小腿杆展开,最终小腿杆会弹跳离地,并最终带动整个仿生青蛙离地,并在惯性作用下在空中自由运动,直至弹跳部件完全展开,完成弹射过程,减少了空气阻力,更好地释放储存的能量,实现有限储能条件下,仿生青蛙的最远跳跃距离,结构简单牢靠,用最小的重量保证强度。
技术特征:1.一种仿生青蛙弹跳结构,其特征在于,包括:
2.根据权利要求1所述的一种仿生青蛙弹跳结构,其特征在于,所述弹跳部件(5)包括:
3.根据权利要求2所述的一种仿生青蛙弹跳结构,其特征在于,所述仿生蛙体(1)的下方还设有脚蹼板(6),所述脚蹼板(6)上设置有支板(7),所述支板(7)上转动设有转杆,所述小腿杆(53)远离所述上横杆(51)的一端与所述转杆相连。
4.根据权利要求1所述的一种仿生青蛙弹跳结构,其特征在于,所述储能部件(4)包括:
5.根据权利要求4所述的一种仿生青蛙弹跳结构,其特征在于,所述仿生蛙体(1)上设置有脱钩支架(8),所述脱钩支架(8)上转动设置有脱钩轴(9),所述限位脱钩(3)与所述脱钩轴(9)相连,所述限位脱钩(3)上设有钩绳(10),所述钩绳(10)的另一端与所述排剑(41)相连。
6.根据权利要求4所述的一种仿生青蛙弹跳结构,其特征在于,所述驱动组件(44)包括对称设置在所述仿生蛙体(1)底部的两个驱动件(441),所述驱动件(441)的输出端设有驱动轴(442),所述滑轮绳索(42)的两端分别与两个所述驱动轴(442)相连。
7.根据权利要求6所述的一种仿生青蛙弹跳结构,其特征在于,所述仿生蛙体(1)上设置有滑轮套(11),所述滑轮套(11)上转动设置有定滑轮(12),所述排剑(41)上设有动滑轮(13),其中一个所述驱动轴(442)上的所述滑轮绳索(42)的另一端依次来回穿过各个所述定滑轮(12)和动滑轮(13)后与另一个所述驱动轴(442)相连。
8.根据权利要求6所述的一种仿生青蛙弹跳结构,其特征在于,所述仿生蛙体(1)上还设有蓄电池(14),所述蓄电池(14)与所述驱动件(441)电性连接。
技术总结本发明公开了一种仿生青蛙弹跳结构,属于仿生青蛙的弹跳技术领域,包括:仿生蛙体,仿生蛙体上方设有主动杆;限位脱钩,设于仿生蛙体上;储能部件,设于仿生蛙体;弹跳部件,设有两个且对称设于仿生蛙体上,且两个弹跳部件分别与主动杆的两端相连,当主动杆脱离限位脱钩发生移动时,会带动弹跳部件进行弹跳;本方案中将储能部件释放能量后,主动杆快速移动时会对弹跳部件进行作用,弹跳部件则会迅速弹跳,保持四十五度的最佳跳跃角度,直至弹跳部件完全展开,通过弹跳部件模仿青蛙的腿部骨骼运动,在保证该仿生青蛙跳跃可靠性的基础上,尽可能地减少重量实现轻量化设计,进而能实现更高效的跳跃运动。技术研发人员:陈向春,於陈浩,于乃辉,孟凡凯,丁俊香,严军,张啸宇,胡龙辉,赵博宇受保护的技术使用者:中国人民解放军陆军炮兵防空兵学院技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/340286.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
可折叠式手推车的制作方法
下一篇
返回列表