一种盾构隧道断面拟合方法、错台量检测方法及检测系统与流程
- 国知局
- 2024-12-06 12:24:29
本技术涉及隧道工程测量,具体涉及一种盾构隧道断面拟合方法、错台量检测方法及检测系统。
背景技术:
1、盾构隧道的管片错台主要指沿着隧道的纵向相邻管片之间移动产生的相对位移。造成盾构隧道管片错台的原因主要有:管片未按规范拼装、千斤顶顶推压力不均匀、注浆压力控制不当、螺栓松弛效应及隧道外部复杂环境的影响等。错台现象往往会引发管片局部破损(开裂)、隧道渗漏水、盾尾漏浆、掉块等病害,这些现象引起的病害威胁着运营期隧道的行车安全。
2、传统的盾构隧道错台检测方法有人工巡检及全站仪扫描。人工巡检即采用钢尺直接对肉眼可见的错台进行测量,人工检测常用于两腰位置的测量,对拱顶位置测量不便,全站仪扫描需要利用天窗时间进行测量,检测效率低,不能满足蓬勃发展的地铁运营隧道巡检的需求,传统的错台量检测方法均耗费大量的人力物力,占用过多运营维护天窗期时间,检测效率低且结果的准确性依赖检测人员的经验水平。
3、三维激光扫描技术在空间信息获取方面具有非接触测量、高精度高分辨率、信息丰富等优点。与全站仪、断面仪等传统测量方法相比,三维激光扫描技术不用频繁设置观测点,就能实现点云数据的采集,且数据密度大、质量好、精度高,测量精度可达到毫米级,因此三维激光扫描技术常用于横断面变形检测、隧道渗水掉块等病害检测、裂缝检测等。
4、对盾构隧道断面的拟合,通常直接采用最小二乘法对其进行拟合,最小二乘法拟合方法需要对所有的数据对象进行拟合,局部噪声对拟合结果的干扰较大,因此在直接采用最小二乘法进行断面的椭圆拟合时,需要对断面点云数据进行噪点滤除处理,这样才能使拟合结果满足要求。而在实际工程中,断面点云精简、滤波、分割等步骤繁琐,且为了拟合真实环境的盾构隧道横断面,更希望对原始断面点云数据进行直接拟合。
技术实现思路
1、本技术提供一种盾构隧道断面拟合方法、错台量检测方法及检测系统,对较少数量的原始断面点云数据直接拟合,并在拟合过程中利用偏离权值来评价拟合结果的可用性以实现在拟合过程中自动滤除噪点,免于拟合前对断面点云数据进行精简、滤波、分割等步骤,使之适用于实际检测工程。
2、本技术通过下述技术方案实现:
3、第一方面,本技术提供一种盾构隧道断面拟合方法,包括以下步骤:
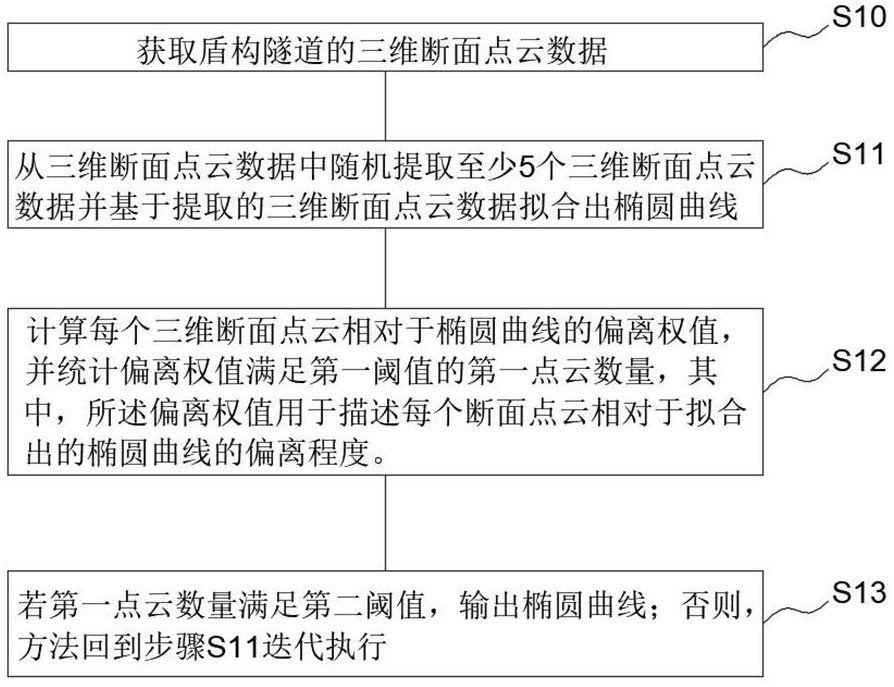
4、a、获取盾构隧道的三维断面点云数据;
5、b、从三维断面点云数据中随机提取至少5个三维断面点云数据并基于提取的三维断面点云数据拟合出椭圆曲线;
6、c、计算每个三维断面点云相对于椭圆曲线的偏离权值,并统计偏离权值满足第一阈值的第一点云数量,其中,所述偏离权值用于描述每个断面点云相对于拟合出的椭圆曲线的偏离程度;
7、d、若第一点云数量满足第二阈值,输出椭圆曲线;否则,方法回到步骤b迭代执行。
8、本技术提供的盾构隧道断面拟合方法,从三维断面点云数据(原始断面点云数据)中选取较少数量的点云数据进行椭圆曲线拟合;该方法通过计算偏离权值,评估每个三维断面点云与拟合出的椭圆曲线之间的偏离程度,从而实现噪点的自动滤除;通过统计第一点云数量,该方法进一步评价椭圆曲线的可靠性,确保拟合误差符合规范要求;该方法尤其适用于实际检测工程中,能够直接对三维断面点云数据进行处理,而无需经过精简、滤波或分割等预处理步骤。
9、在一些可选的实施例中,偏离权值通过以下内容获得:
10、求解椭圆曲线的两个焦点坐标以及长轴长度;
11、计算盾构隧道断面点云与两个焦点的间距和;
12、将长轴长度与间距和差值的绝对值作为偏离权值。
13、在一些可选的实施例中,步骤d进一步包括:
14、输出椭圆曲线前,再次执行步骤b和步骤c,以得到第二点云数量;
15、若第二点云数量大于第一点云数量,更新椭圆曲线。
16、在一些可选的实施例中,步骤b进一步包括:
17、标记隧道轮廓与隧道地面的两个交点;
18、以盾构隧道中轴线为圆心,构建两个交点间的优弧;
19、标记优弧的五等分点,并构建从中轴线到五等分点的射线以得到五个扇形区域;
20、分别在五个扇形区域中随机选取一个三维断面点云数据;
21、采用最小二乘法对选取出的三维断面点云数据进行椭圆拟合。
22、第二方面,本技术提供一种盾构隧道断面错台量检测方法,基于第一方面所述的任一种盾构隧道断面拟合方法实现,包括以下步骤:
23、e、获取盾构隧道的三维点云数据并基于其得到环缝位置;
24、f、沿盾构隧道的延伸方向,在环缝前后截取得到第一断面和第二断面;
25、g、采用盾构隧道断面拟合方法分别得到第一断面、第二断面的第一断面轮廓和第二断面轮廓;
26、h、套合第一断面轮廓和第二断面轮廓,计算错台量。
27、在一些可选的实施例中,步骤e包括:
28、将盾构隧道三维点云数据映射为二维灰度图像;
29、通过二维灰度图像定位环缝轮廓;
30、采用霍夫变换方法拟合环缝,并滤除噪点;
31、根据三维点云数据与二维灰度图像像素点的映射关系得出环缝位置。
32、在一些可选的实施例中,将盾构隧道三维点云数据映射为二维灰度图像,包括:
33、采用3~8mm的网格对平面点云进行栅格化。
34、在一些可选的实施例中,采用5mm的网格对平面点云进行栅格化。
35、在一些可选的实施例中,通过以下内容计算错台量:
36、计算第一断面轮廓在倾角为α情况下其上m点到椭圆曲线圆心的距离r1:
37、r1=a1*b1/[a12*(sin(θ1-α))2+b12*(cos(θ1-α))2]1/2;
38、其中,a1为第一断面轮廓对应椭圆曲线的长半轴长度,b1为第一断面轮廓对应椭圆曲线的短半轴长度,θ1为由第一断面轮廓对应椭圆曲线圆心延伸到m点的射线与水平面的夹角;
39、计算第二断面轮廓在倾角为β情况下其上n点到椭圆曲线圆心的距离r2:
40、r2=a2*b2/[a22*(sin(θ2-β))2+b22*(cos(θ2-β))2]1/2;
41、其中,a2为第二断面轮廓对应椭圆曲线的长半轴长度,b2为第二断面轮廓对应椭圆曲线的短半轴长度,θ2为由第二断面轮廓对应椭圆曲线圆心延伸到n点的射线与水平面的夹角;
42、计算错台量δr:
43、δr=|r1-r2|;
44、其中,在盾构隧道的延伸方向上,m点和n点重合。
45、在一些可选的实施例中,所述第一断面和第二断面与环缝的间距均为6cm。
46、第三方面,本技术提供一种盾构隧道断面错台量检测系统,包括三维激光扫描设备和计算机设备;
47、所述三维激光扫描设备用于扫描盾构隧道以获得盾构隧道的三维点云数据,并用于将三维点云数据发送至计算机设备;
48、所述计算机设备包括存储模块、处理器以及存储在存储模块上并可在处理器上运行的第一计算机程序和第二计算机程序,其中,处理器执行第一计算机程序时实现如第一方面所述的任一种盾构隧道断面拟合方法,处理器执行第二计算机程序时实现如第二方面所述的任一种盾构隧道断面错台量检测方法。
49、本技术与现有技术相比,具有如下的优点和有益效果:
50、本技术提供的盾构隧道断面拟合方法、错台量检测方法及检测系统,从三维断面点云数据(原始断面点云数据)中选取较少数量的点云数据进行椭圆曲线拟合;该方法通过计算偏离权值,评估每个三维断面点云与拟合出的椭圆曲线之间的偏离程度,从而实现噪点的自动滤除;通过统计第一点云数量,该方法进一步评价椭圆曲线的可靠性,确保拟合误差符合规范要求;该方法尤其适用于实际检测工程中,能够直接对三维断面点云数据进行处理,而无需经过精简、滤波或分割等预处理步骤。
本文地址:https://www.jishuxx.com/zhuanli/20241204/341208.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。