一种边坡柔性防护系统耗能器工作状态无接触智能化检测方法
- 国知局
- 2024-12-06 12:28:42
本发明涉及边坡地质灾害防护,具体涉及一种边坡柔性防护系统耗能器工作状态无接触智能化检测方法。
背景技术:
1、柔性防护系统广泛应用于崩塌落石、泥石流、风沙流、风雪流等强冲击自然灾害防护中。系统工作时经常面临多次冲击的情况,需要定期进行维护,目前,主要依靠人工巡检确定系统的灾后残余防护能力。系统工作时主要通过耗能器消耗冲击能量,系统残余防护能力与耗能器的工作状态息息相关。人工巡检最关键的工作之一就是确定耗能器的工作状态,评估耗能器的剩余耗能能力,从而判断结构是需要维修、加强还是换新。由于耗能器工作具有高度非线性特征,巡检人员通过人工测量耗能器的拉伸量来评价其剩余耗能能力往往误差较大。同时,柔性防护系统工作环境多为高山陡崖等危险地段,灾害发生后近距离采集数据十分危险。因此,亟需一种高精度无接触检测方法。
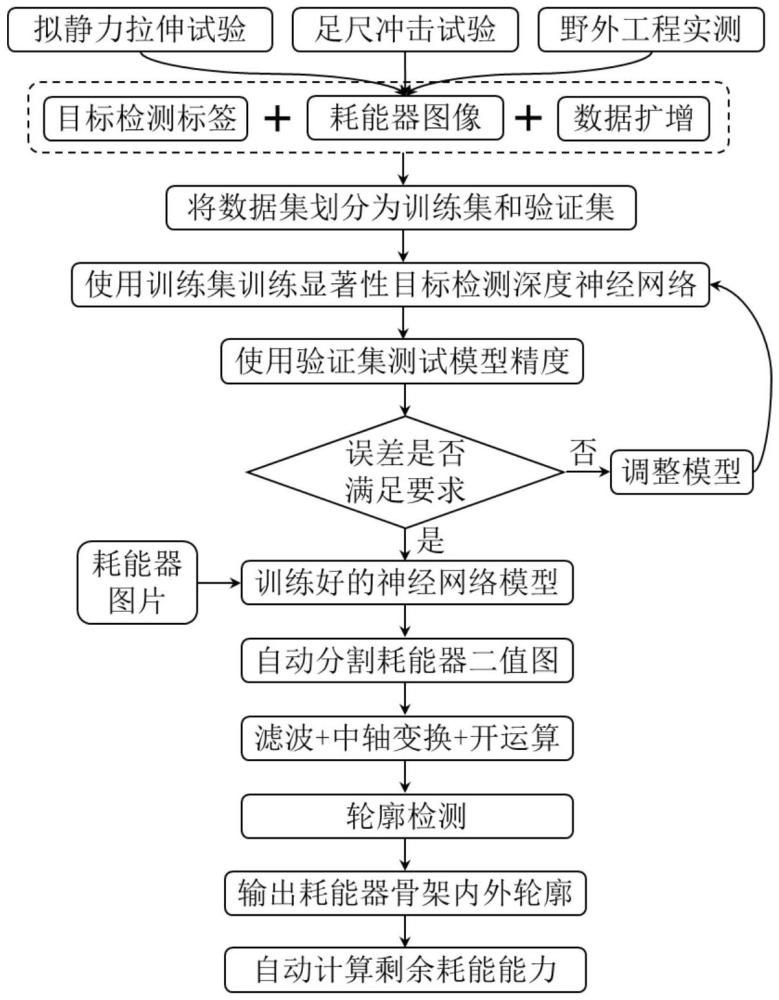
2、显著性目标检测技术是目标检测领域的一个分支,主要用于将目标从背景中分割出来并输出二值图,即目标像素值为1,背景像素值为0。形态学图像处理技术是计算机视觉领域的分支,主要用于处理二值图获取其中的特征。采用训练好的显著性目标检测深度神经网络可从图片中将耗能器的二值图自动分割出来,进一步利用滤波、中轴变换、开运算及轮廓检测等形态学图像处理操作获取耗能器二值图骨架内外轮廓。通过耗能器二值图骨架内外轮廓可自动计算耗能器剩余耗能能力,可实现耗能器工作状态精确、无接触智能化检测。对提高柔性防护系统灾损评估精度、降低安全风险具有重要意义。
技术实现思路
1、为解决现有技术中存在的问题,本发明提供了一种边坡柔性防护系统耗能器工作状态无接触智能化检测方法,实现耗能器工作状态精确、无接触智能化检测,从而降低柔性防护结构应急抢险响应迟缓所带来的间接损失,解决了上述背景技术中提到的现有人工检测方法精度差、风险大的问题。
2、为实现上述目的,本发明提供如下技术方案:一种边坡柔性防护系统耗能器工作状态无接触智能化检测方法,包括如下步骤:
3、s1、进行耗能器模拟静力拉伸试验、足尺冲击试验以及野外工程实测建立耗能器工作过程图像数据集;
4、s2、采用数据集训练显著性目标检测深度神经网络实现耗能器工作状态二值图自动分割;
5、s3、采用形态学图像处理技术获取耗能器骨架并采用轮廓检测技术提取耗能器骨架内外轮廓自动计算剩余耗能能力。
6、优选的,在步骤s1中,具体包括如下:
7、s11、开展耗能器模拟静力拉伸试验获得其拉伸变形全过程视频,并抽取关键帧获得全工作过程图像;
8、s12、开展防护结构足尺冲击试验与野外工程实测获得耗能器多背景工作前后状态图像;
9、s13、对拟静力拉伸试验、足尺冲击试验以及野外工程实测获得的耗能器图像进行显著性目标检测标签标注,同时进行数据扩增并划分为训练集和验证集。
10、优选的,为了获取足够的耗能器工作图像,通过开展耗能器拟静力拉伸试验,防护结构足尺冲击试验、野外工程实测等途径收集图像,测试方法、加载设备、加载速度等应按照相关规范要求。
11、优选的,为了提高显著性目标检测深度神经网络模型的泛化性能,应该尽量获取耗能器全工作过程拉伸变形图像及涵盖日常使用场景多背景图像。
12、优选的,在步骤s2中,具体包括如下:
13、s21、确定显著性目标检测深度神经网络的结构并编写代码;
14、s22、采用训练集训练显著性目标检测深度神经网络并采用验证集进行测试;
15、s23、监测训练误差、验证误差并调整网络结构直至误差满足精度要求,得到训练好的神经网络模型,利用训练好的神经网络模型实现耗能器工作状态二值图自动分割。
16、优选的,在步骤s3中,具体包括如下:
17、s31、对显著性目标检测深度神经网络输出的耗能器二值图进行滤波和中轴变换获取清晰的骨架图;
18、s32、对骨架图进行开运算和轮廓检测获取耗能器骨架内外轮廓长度;
19、s33、根据耗能器骨架内外轮廓长度计算耗能器剩余耗能能力。
20、优选的,在步骤s13中,为了对耗能器图像进行语义分割标注,所述进行显著性目标检测标签标注是选择labelme、eiseg或labelimg标注软件进行标注,为了保证训练效果,标注时统一标准保证标签的准确性和一致性;为了提高显著性目标检测深度神经网络模型的训练精度,形成图像数据集时,对原始图像及标签进行旋转、缩放、模糊操作实现图像数据扩增。
21、优选的,在步骤s21中,为了保证显著性目标检测深度神经网络模型的训练效果,所述显著性目标检测深度神经网络是u2-net、f3-net、basnet等成熟的显著性目标检测深度神经网络结构的任一种。
22、优选的,在步骤s22中,训练显著性目标检测深度神经网络时,损失函数l按下式计算:
23、
24、式中:m表示特征图个数,m代表第m个特征图,表示第m个子特征图权重系数,表示第m个子特征图损失值,wfuse表示特征融合后的总特征图权重系数,lfuse表示特征融合后的总特征图损失值;
25、为了评价显著性目标检测深度神经网络的训练效果,训练显著性目标检测深度神经网络时,通过fβ、mae的关键评价指标判定模型性能,按下式计算:
26、
27、式中:β为权重因子,precision为准确率,recall为召回率,h和w分别为图片的长和宽,r和c分别表示图片长和宽方向的像素坐标,p(r,c)和g(r,c)分别表示模型预测值和标签真实值。
28、优选的,为了自动计算耗能器剩余耗能能力,对训练好的神经网络输出的二值图进一步采用形态学图像处理技术进行操作获取耗能器骨架图,具体包括滤波、中轴变换、开运算和三个步骤。在步骤s31中,为了提高中轴变换输出骨架图的质量,采用python语言及opencv软件库对显著性目标检测深度神经网络输出的耗能器二值图进行滤波,为了得到耗能器骨架图,再采用scikit-image库中的medialaxis函数进行中轴变换;滤波时选择高斯滤波,按照下式计算:
29、
30、式中:xg和yg分别表示距离高斯核中心点的横纵坐标距离,δ表示方差。
31、优选的,在步骤s32中,为了减小骨架粗细带来的计算误差,基于python语言及opencv软件库,采用开运算统一耗能器骨架粗细;为了得到耗能器骨架图内外轮廓,再采用canny算法对耗能器骨架图进行轮廓检测,按照下式计算:
32、θ[i,j]=arctan(py[i,j]/px[i,j])
33、
34、式中:m[i,j]和θ[i,j]分别表示图像中像素点的梯度幅值和方向,px[i,j]和py[i,j]分别表示像素点在x和y方向的偏导数。
35、优选的,在步骤s33中,所述耗能器剩余耗能能力r通过其骨架图轮廓检测输出的内外轮廓长度进行计算,如下式:
36、
37、l0=η(lr+lc);
38、式中:lr表示耗能器实际工作后尚未启动的长度,lc表示耗能器实际工作后的伸长量,l0表示在极限状态下耗能器无法启动的长度,louter表示耗能器骨架图外轮廓长度,linner表示耗能器骨架图内轮廓长度,η为耗能器的不完全启动系数。
39、本发明的有益效果是:
40、1)本发明提出了一种边坡柔性防护系统耗能器工作状态无接触智能化检测方法,首次在柔性防护结构耗能器检测方面采用深度学习技术和形态学图像处理技术,实现了耗能器工作状态无接触智能化检测,为目前人工检测方法提供了革命性的智能化替代方案;
41、2)本发明方法实现了耗能器工作状态无接触检测,无需近距离接触灾害源,大幅度提高了灾后人工检测的安全性;本发明方法实现了耗能器剩余耗能能力自动计算,通过精确比例计算的方式提高了计算精度;
42、3)本发明所述的边坡柔性防护系统耗能器工作状态无接触智能化检测方法,逻辑清晰、理论支撑充分,可操作性高,为目前防护领域强烈依赖人工检测的行业现状提供了革命性的智能化替代方案。推动了防护行业“智能化”、“自动化”、“去劳动力化”的进程,为人工智能技术在防护行业中的应用进行了探索,对推动行业进步具有重大意义。本发明具有实质性特点和进步,拥有十分广泛的市场应用前景,非常适合推广应用。
本文地址:https://www.jishuxx.com/zhuanli/20241204/341614.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表