一种机械式宽带连续相位可调的智能超表面系统结构
- 国知局
- 2024-12-26 16:15:41
本发明涉及无线通信,具体是一种机械式宽带连续相位可调的智能超表面系统结构。
背景技术:
1、在当前的无线通信领域,传统的信号传播方法面临诸多限制,尤其是在信号覆盖、传输效率和灵活性方面。随着5g及未来通信技术的发展,对无线信号管理的需求日益增长,尤其是在复杂环境中实现高效、定向的信号控制。在此背景下,智能超表面(intelligentreflecting surfaces,irs)作为一种新技术,被提出用于增强信号覆盖和传输效率,通过动态调整其表面特性来控制电磁波的反射方向和状态。
2、然而,现有的大多数智能超表面的控制主要集中在电子开关式,电子开关式智能反射面单元通过高频二极管实现了离散相位调节,但是离散相位个数有限,无法实现连续调控,从而使得智能反射面产生的波束成型增益受到限制。
技术实现思路
1、本发明的目的是提供一种机械式宽带连续相位可调的智能超表面系统结构,不仅提高了智能超表面在不同通信环境下的适应性和效率,也大大增加了机械式调控的可靠性和稳定性。
2、本发明的技术方案是:
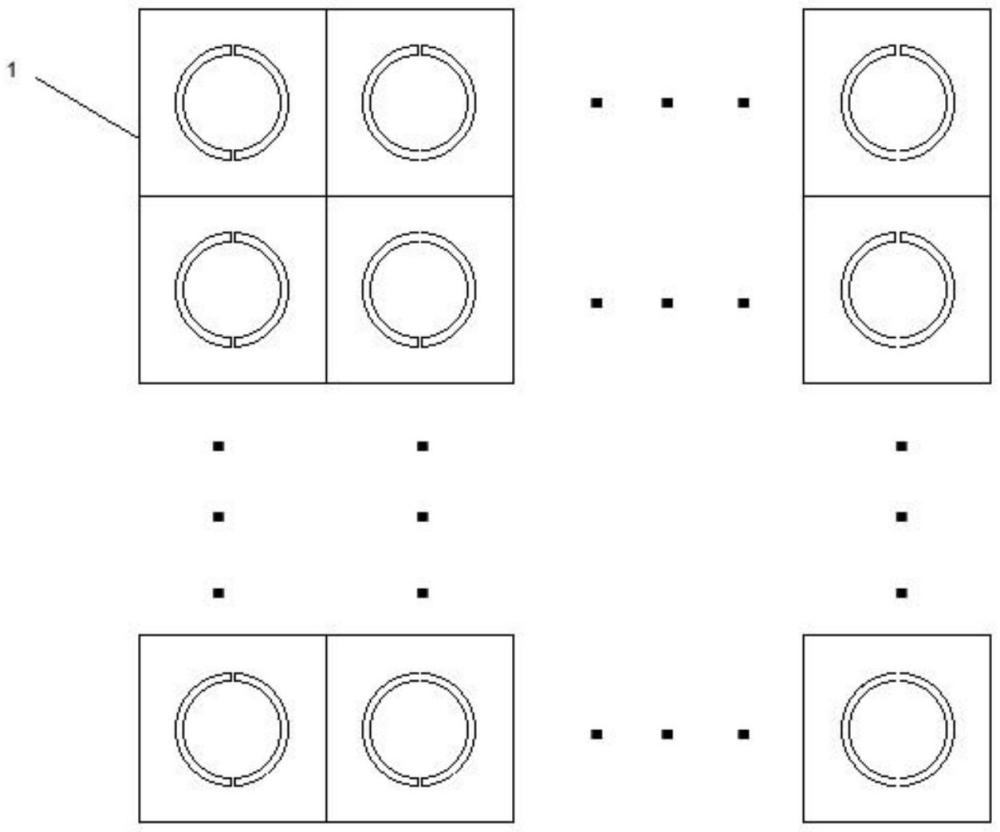
3、一种机械式宽带连续相位可调的智能超表面系统结构,包括:智能超表面和机械控制单元,智能超表面包括多个智能超表面单元,多个智能超表面单元呈阵列方式排布,每个所述智能超表面单元包括多层结构,从下至上依次为:金属铜板、方形介质基板、圆柱形介质基板和金属铜图案,所述金属铜图案包括:两个半环形金属铜贴片,两个半环形金属铜以内环面相对的方式对称设置,且两个半环形金属铜的两端之间设有空隙;所述金属铜板与所述方形介质基板的中心均开设圆形小孔,且所述金属铜板的圆形小孔与所述方形介质基板的圆形小孔孔道对齐连通;机械控制单元,包括多个舵机,每个所述舵机对应一个智能超表面单元,且相对应的舵机与智能超表面单元之间通过金属柱连接,所述金属柱一端连接舵机的输出轴,另一端插入所述金属铜板的圆形小孔与所述方形介质基板的圆形小孔中。
4、进一步的,所述金属铜板为方形板,且与所述方形介质基板的板面尺寸相同。
5、进一步的,所述舵机操控智能超表面单元的旋转角度范围为:0°至90°。
6、进一步的,每个所述智能超表面单元的仿真设计方法包括以下步骤:
7、步骤1:智能超表面的周期边长p是一个比波长λ小的数值,即0<p<λ;其中λ=c/f,c表示光在真空中的速度为3×108m/s,f表示所设计的智能超表面工作的频率,具体的p值通过软件仿真优化调整找到所需要的具体数值;
8、步骤2:圆柱形介质基板的厚度h选为工作频率下波长的一部分,即0<h<λ4,这里的波长λ与介质基板的相对介电常数εr有关,即具体h值通过软件仿真优化调整找到所需要的具体数值;
9、步骤3:方形的介质基板的厚度h1通常选为工作频率下波长的一部分,为λ4即h1<λ4,这里的波长λ与介质基板的相对介电常数εr有关,即这里h1值大于0,所以0<h1<λ4,具体的h1值通过软件仿真优化调整找到所需要的具体数值;
10、步骤4:外圆环的半径r小于工作频率下波长的一部分,为λ4即r<λ4,其中λ=c/f,c表示光在空气或者真空中的速度为3×108m/s,f表示所设计的智能超表面工作的频率,这里r值大于0,所以0<r<λ4,内圆环的半径r比外圆环半径r小,即0<r<r<λ4,此时,这两者存在的差值设计相位才可以覆盖0°~180°;环宽w直接等于r-r,即0<r-r<(λ4)-r,具体的值r、r和w通过软件仿真优化调整找到所需要的具体数值;
11、步骤5:开口缝隙g也小于工作频率下的波长为λ10,即0<g<λ10,具体的g值通过软件仿真优化调整找到所需要的具体数值;
12、步骤6:根据实际所用到的金属柱的半径设定圆形小孔r1的大小,然后直接在软件中输入具体的数值。
13、进一步的,所述金属铜图案与所述金属铜板均为黄色。
14、进一步的,所述智能超表面单元从0°~90°每次向左旋转10°,获得相应的反射幅度和反射相位。即0°、10°、20°、30°、40°、50°、60°、70°、80°、90°。
15、进一步的,频率为6.25ghz、6.5ghz、6.8ghz、7ghz时旋转角度与反射相位之间的关系式为:
16、当频率为6.25ghz时,智能超表面逐渐由0°旋转至90°,每次逆时针旋转10°,在此过程中,旋转角度与反射相位呈一一对应关系,同时,所有提到的旋转角度和相应的反射相位值都转换为弧度(rad),弧度=角度×π/180,或者,弧度=相位×π/180,π用3.14来代替,反射相位θ与旋转角度ψ之间的关系为公式(1):
17、θ=-0.07025ψ4-0.2521ψ3+0.2973ψ2+1.877ψ-0.467 (1);
18、因此,一旦确定了旋转角度,就能推断出对应的反射相位,反之亦然,这样就可以实现对反射相位进行快速精准的连续调节。
19、当频率为6.5ghz时,智能超表面逐渐由0°旋转至90°,每次逆时针旋转10°,在此过程中,旋转角度与反射相位呈一一对应关系,同时,所有提到的旋转角度和相应的反射相位值都需转换为弧度(rad),弧度=角度×π/180,或者,弧度=相位×π/180,π用3.14来代替,旋转角度ψ与反射相位θ之间的关系为公式(2):
20、θ=-0.03936ψ4+0.04163ψ3+0.1103ψ2+1.87ψ-0.9189 (2);
21、因此,一旦确定了旋转角度,就能推断出对应的反射相位,反之亦然,这样就可以实现对反射相位进行快速精准的连续调节。
22、当频率为6.8ghz时,智能超表面逐渐由0°旋转至90°,每次逆时针旋转10°,在此过程中,旋转角度与反射相位呈一一对应关系,同时,所有提到的旋转角度和相应的反射相位值都需转换为弧度(rad),弧度=角度×π/180,或者,弧度=相位×π/180,π的值设定为3.14,旋转角度ψ与反射相位θ之间的关系为公式(3):
23、θ=-0.111ψ4+0.2719ψ3-0.07556ψ2+1.874ψ-1.533 (3);
24、因此,一旦确定了旋转角度,就能推断出对应的反射相位,反之亦然,这样就可以实现对反射相位进行快速精准的连续调节。
25、当频率为7ghz时,智能超表面逐渐由0°旋转至90°,每次逆时针旋转10°,在此过程中,旋转角度与反射相位呈一一对应关系,同时,所有提到的旋转角度和相应的反射相位值都需转换为弧度(rad),弧度=角度×π/180,或者,弧度=相位×π/180,π用3.14来代替,旋转角度ψ与反射相位θ之间的关系为公式(4):
26、θ=-0.03962ψ4+0.0834ψ3+0.2569ψ2+1.713ψ-1.929 (4);
27、因此,一旦确定了旋转角度,就能推断出对应的反射相位,反之亦然。这样就可以实现对反射相位进行快速精准地连续调节。
28、进一步的,所述方形介质基板和所述圆柱形介质基板均为f4b介质基板。
29、与现有技术相比,本发明的有益效果是:
30、本发明充分利用环形超表面单元开口旋转角度与反射相位成线性相关的特性,通过舵机的连续旋转运动带动超表面单元旋转,从而使得反射相位在0°至180°范围内连续可调,相比于开缝隙的方式,通过打孔的方式把舵机金属柱与超表面旋转部分相连,不仅使得反射衰减得到有效降低同时反射单元的工作带宽大幅提升。此外,相比于基于高频二极管的超表面,机械式超表面当调控完成后无需任何电路功耗。
31、通过本发明提出的在频率为6.25ghz、6.5ghz、6.8ghz、7ghz时旋转角度与反射相位之间的关系式,反射相位θ可用旋转角度ψ的多项式描述。一旦确定了旋转角度ψ,就能用公式直接给出对应的反射相位θ,反之,要想调控到某个反射相位,直接根据公式就可以得到要旋转的角度,调控方便,大大降低了算法复杂度。可以实现对反射相位进行快速精准地连续调节。
本文地址:https://www.jishuxx.com/zhuanli/20241216/348987.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表