伸缩臂式混凝土激光整平机的制作方法
- 国知局
- 2024-12-26 16:39:16
本技术涉及激光整平机,尤其涉及伸缩臂式混凝土激光整平机。
背景技术:
1、铺设混凝土时,在施工区灌注混凝土之后,在混凝土硬化之前必须对其进行整平,以使硬化后的混凝土表面平坦,这时便需要用到混凝土整平机。施工工程中,需人工对地面进行夯实,然后通过设备将混凝土混料倒入施工处,再人工将混凝土混料铺摊至相对平整,最后利用整平机震动压实整平。
2、现有技术中,公告号为cn208869918u的中国实用新型专利文献中提供一种路桥施工用防卡料的混凝土铺摊整平机,该整平机的整平机构通过设置填料装置对坑洼之地进行混凝土混料填料,通过设置刮板将混凝土地面上的鼓包刮平,并可由震动电机驱动震动板将混凝土铺摊面压实整平,相比于传统功能单一的整平机,本实用新型同时具有填料、刮平与整平三道工序,避免填料时卡料、刮平时耗时,大大降低了劳动强度,缩短了施工时间,提高了工作效率。
3、一般来说,在刮平高于地坪标高的混凝土时,是按照如图8所示,刮板按照箭头方向刮动混凝土堆,混凝土堆在刮板的刮动作用下向前同时向两侧摊开,最后摊平,达到整平效果;而当混凝土堆较高时,则会出现如图9所示的情况,混凝土堆在刮板的刮动作用下向前向两侧摊开时,会有较多的混凝土从两侧漏掉。由于实际作业过程中所谓缩短整平机的移动距离,普遍采取从场地一侧向另一侧逐渐连续整平的作业方式,所以针对上述图中9中的情况,为了避免整平机来回倒车,整平机会采用如图10所示的作业方式,利用刮板的半边刮动混凝土堆,以避免倒车回头作业,但是如此操作,刮板的利用率明显减小,不利于提高作业效率。
4、然而上述实用新型的不足之处在于,其中的刮板属于整平机中的常规的刮板结构,主要用于刮平高度与地坪标高相差较小的微微隆起的混凝土堆,这种刮板对于从混凝土罐车上倾倒时堆积产生的较高的如图9所示的混凝土堆的刮平效果仍然一般,需要改进。
技术实现思路
1、本实用新型的目的是为了解决现有技术中的混凝土铺摊整平机的刮板刮平堆积较高的混凝土堆时效果一般的问题,而提出的伸缩臂式混凝土激光整平机。
2、为了实现上述目的,本实用新型采用了如下技术方案:
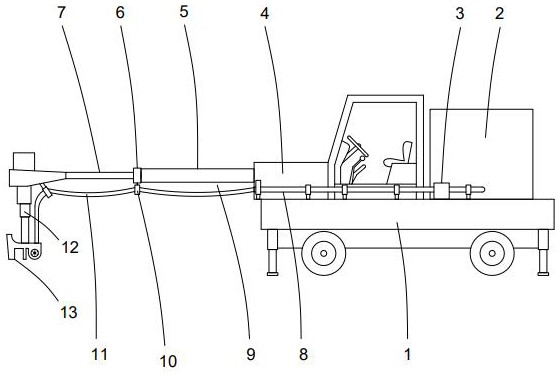
3、伸缩臂式混凝土激光整平机,包括车体,所述车体的后端设置有混凝土罐,所述车体的前端设置有控制系统、伸缩臂,所述伸缩臂的工作端设置有升降杆,所述升降杆的底端设置有整平机构,所述整平机构包括振动板、刮板和填料装置,所述混凝土罐到填料装置之间设置有输送管,所述填料装置远离刮板一侧的中间位置设置有深度刮料装置,所述深度刮料装置包括固定在填料装置上的固定座,所述固定座的内部设置有刮料板,所述固定座的顶部设置有用于向下推动刮料板的液压缸;
4、所述控制系统包括激光发射器和控制箱,所述控制箱与伸缩臂、升降杆、整平机构、填料装置、液压缸电性连接。
5、进一步地,所述固定座的内部设置有开口朝下和朝向车体的导向槽,所述刮料板位于导向槽内侧。
6、进一步地,所述刮料板、导向槽的截面均呈u字型,所述刮料板、导向槽的凹面朝向车体,所述刮料板的外壁与导向槽的内壁贴合。
7、进一步地,所述输送管包括安装在车体上的输送钢管,所述输送钢管的一端与混凝土罐连通,另一端与输送软管的一端连通,所述输送钢管上安装有输送泵,所述输送软管的另一端通向填料装置。
8、进一步地,所述伸缩臂包括从伸缩底座内伸出的第一单臂和从第一单臂内伸出的第二单臂,所述第一单臂靠近第二单臂的一端设置有连接座,所述连接座的下方连接有吊环,所述吊环与输送软管之间固定连接。
9、进一步地,所述填料装置包括顶部开口的填料槽,所述填料槽内设置有绞龙,所述填料槽的端部设置有与绞龙连接的绞龙电机,所述绞龙电机的工作端与绞龙连接,所述填料槽位于绞龙的下方设置有填料孔,所述深度刮料装置与填料槽的外壁之间固定连接。
10、进一步地,所述刮料板的底端高于填料装置的底端。
11、与现有技术相比,本实用新型提供了伸缩臂式混凝土激光整平机,具备以下有益效果:
12、本实用新型伸缩臂式混凝土激光整平机,使用时,通过伸缩臂调整整平机构的前后位置,升降杆调整整平机构的高度位置,碰到普通的微微隆起的混凝土堆时,使用刮板刮平,碰到需要填料的位置,通过填料装置把混凝土罐内的混凝土填装到该位置,碰到隆起高度较高的混凝土堆时,启动液压缸带动刮料板下降至刮料板的底端低于刮板的位置,然后控制伸缩臂缩回,带动刮料板先对高的混凝土堆的中间刮动较多的混凝土,使刮料板刮过的位置的混凝土面低于刮料板两侧的混凝土面,形成低凹处,然后当刮板对该位置进行二次刮平时,超过地坪标高的混凝土在刮板的刮动作用下自流到低凹处,从而一次性刮平隆起较高的混凝土堆,相比于现有技术,可以有效避免倒车、回头重新刮平的动作,从而提高混凝土整平效率。
13、本实用新型的其他优点、目标和特征,在某种程度上将在随后的说明书中进行阐述;并且在某种程度上,基于对下文的考察研究,对本领域技术人员而言将是显而易见的;或者,可以从本实用新型的实践中得到教导。
技术特征:1.伸缩臂式混凝土激光整平机,包括车体(1),所述车体(1)的后端设置有混凝土罐(2),所述车体(1)的前端设置有控制系统(4)、伸缩臂(9),所述伸缩臂(9)的工作端设置有升降杆(12),所述升降杆(12)的底端设置有整平机构(13),所述整平机构(13)包括振动板(1301)、刮板(14)和填料装置(15),所述混凝土罐(2)到填料装置(15)之间设置有输送管,其特征在于,所述填料装置(15)远离刮板(14)一侧的中间位置设置有深度刮料装置(18),所述深度刮料装置(18)包括固定在填料装置(15)上的固定座(21),所述固定座(21)的内部设置有刮料板(22),所述固定座(21)的顶部设置有用于向下推动刮料板(22)的液压缸(17);
2.根据权利要求1所述的伸缩臂式混凝土激光整平机,其特征在于,所述固定座(21)的内部设置有开口朝下和朝向车体(1)的导向槽(23),所述刮料板(22)位于导向槽(23)内侧。
3.根据权利要求2所述的伸缩臂式混凝土激光整平机,其特征在于,所述刮料板(22)、导向槽(23)的截面均呈u字型,所述刮料板(22)、导向槽(23)的凹面朝向车体(1),所述刮料板(22)的外壁与导向槽(23)的内壁贴合。
4.根据权利要求1所述的伸缩臂式混凝土激光整平机,其特征在于,所述输送管包括安装在车体(1)上的输送钢管(8),所述输送钢管(8)的一端与混凝土罐(2)连通,另一端与输送软管(11)的一端连通,所述输送钢管(8)上安装有输送泵(3),所述输送软管(11)的另一端通向填料装置(15)。
5.根据权利要求4所述的伸缩臂式混凝土激光整平机,其特征在于,所述伸缩臂(9)包括从伸缩底座内伸出的第一单臂(5)和从第一单臂(5)内伸出的第二单臂(7),所述第一单臂(5)靠近第二单臂(7)的一端设置有连接座(6),所述连接座(6)的下方连接有吊环(10),所述吊环(10)与输送软管(11)之间固定连接。
6.根据权利要求1所述的伸缩臂式混凝土激光整平机,其特征在于,所述填料装置(15)包括顶部开口的填料槽,所述填料槽内设置有绞龙(20),所述填料槽的端部设置有与绞龙(20)连接的绞龙电机(16),所述绞龙电机(16)的工作端与绞龙(20)连接,所述填料槽位于绞龙(20)的下方设置有填料孔(19),所述深度刮料装置(18)与填料槽的外壁之间固定连接。
7.根据权利要求1所述的伸缩臂式混凝土激光整平机,其特征在于,所述刮料板(22)的底端高于填料装置(15)的底端。
技术总结本技术公开了伸缩臂式混凝土激光整平机,属于激光整平机技术领域;伸缩臂式混凝土激光整平机,包括车体,车体的后端设置有混凝土罐,车体的前端设置有控制系统、伸缩臂,伸缩臂的工作端设置有升降杆,升降杆的底端设置有整平机构,整平机构包括、刮板和填料装置,混凝土罐到填料装置之间设置有输送管,深度刮料装置包括固定在填料装置上的固定座,固定座的内部设置有刮料板,固定座的顶部设置有用于向下推动刮料板的液压缸,控制系统包括激光发射器和控制箱,控制箱与伸缩臂、升降杆、整平机构、填料装置、液压缸电性连接;本技术具有可以一次性刮平较高的混凝土堆、提高整平机的作业效率的优点。技术研发人员:张长颢,张凯,朱学彬,王金平受保护的技术使用者:河南邦士富科技有限公司技术研发日:20240410技术公布日:2024/12/12本文地址:https://www.jishuxx.com/zhuanli/20241216/350682.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表