一种基于人员行为分析与位置跟踪的智能作业安全管控方法及系统与流程
- 国知局
- 2025-01-10 13:31:52
本发明涉及计算机视觉领域,尤其涉及一种基于人员行为分析与位置跟踪的智能作业安全管控方法及系统。
背景技术:
1、作业安全管控的实质是对人员行为的管理与控制,目前对于作业安全管控的实施一般是通过通用和针对性的提出规章制度,通过人员监护,通过视频监视等,该方法会产生较大的人力成本,智能化水平较低,管控效果严重依赖于人员的工作状态。人员监护存在以下缺点:执行不力,比如监护人员未严格履行作业程序,如未对照许可证要求逐项检查落实安全措施,或未对现场安全措施、应急方案等进行确认;责任心不强:监护人员擅自脱离监护岗位,或进行多点监护,导致监护不到位。
技术实现思路
1、发明目的:本发明旨在提供一种减少人力成本并增加作业安全管控效率的基于人员行为分析与位置跟踪的智能作业安全管控方法;本发明的另一目的是提供一种基于人员行为分析与位置跟踪的智能作业安全管控系统。
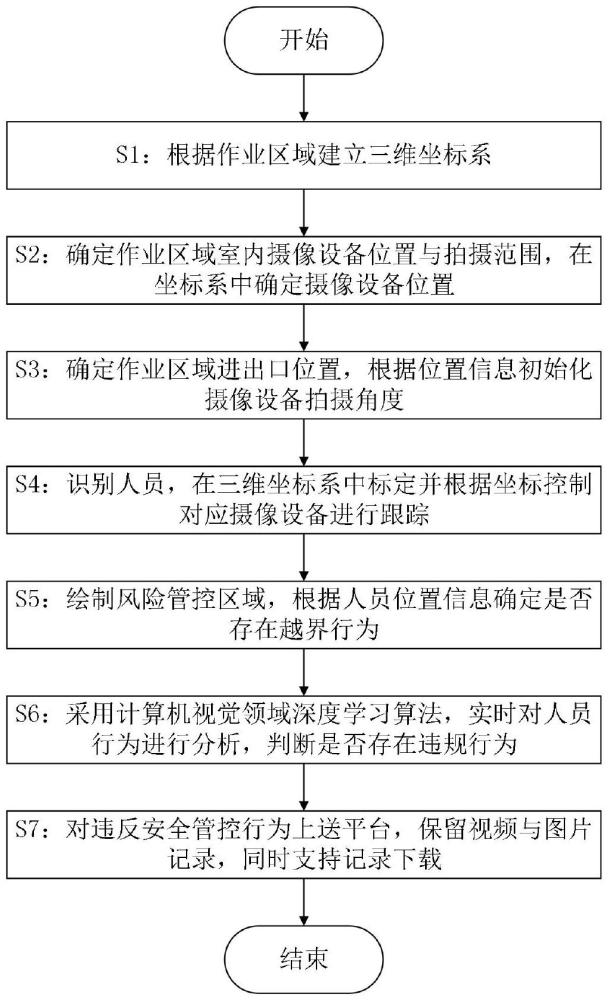
2、技术方案:本发明所述的基于人员行为分析与位置跟踪的智能作业安全管控方法,包括如下步骤:
3、s1:构建作业区域的三维坐标系;
4、s2:根据作业区域室内摄像设备位置,在坐标系中确定摄像设备位置;
5、s3:确定作业区域进出口位置,根据位置信息初始化摄像设备拍摄角度和扫描三维区域范围;
6、s4:识别人员并在三维坐标系中对其标定坐标,并根据标定的坐标控制对应摄像设备进行人员跟踪;
7、s5:设定风险管控区域,根据人员位置信息判断是否存在越界行为;
8、s6:采用基于深度学习的视觉算法,对人员行为进行实时分析,判断是否存在违规行为;
9、s7:对违反安全管控行为上送系统,保留视频与图片记录,同时支持记录下载。
10、进一步的,步骤s1具体如下:
11、s11:确定作业区域范围,根据现场实际情况确认作业行为的区域;
12、s12:按照正坐标原则确定三维坐标系原点位置。
13、进一步的,步骤s2具体如下:
14、摄像设备包括高清球机和高清枪机;
15、s21:获取作业区域空间分布与摄像设备观测范围信息;
16、s22:根据s21获取信息,计算能够覆盖全部作业区域的最小摄像设备个数;
17、s23:根据摄像设备个数,计算其间隔距离,并在三维坐标系中标定摄像设备位置。
18、进一步的,步骤s3具体如下:
19、s31:确定作业区域进出口位置,并设置高清枪机观察进出口;
20、s32:根据s2确定的摄像设备位置信息和s31确定的进出口位置,确定初始化时摄像设备拍摄角度;
21、s33:当作业区域无人时对摄像设备拍摄位置进行初始化。
22、进一步的,步骤s4具体如下:
23、s41:识别人体轮廓;
24、s42:根据识别出的人体轮廓的最大外接矩形与其对应的摄像设备位置,计算人体三维坐标;
25、s43:将摄像设备接入流媒体服务,根据人体三维坐标调用对应位置的摄像设备调整角度使人体始终在视频画面中心处;
26、s44:当人体坐标移动到该摄像设备拍摄范围外,根据人体三维坐标、摄像设备位置坐标和拍摄范围,计算并调用相应摄像设备;
27、s45:重复步骤s43与s44实现人员跟踪。
28、进一步的,步骤s5具体如下:
29、s51:在三维坐标系中确定风险管控区域;
30、s52:根据人体三维坐标,判断风险管控区域与人体三维坐标是否有重合部分;
31、s53:计算重合比例,若大于阈值则判断存在越界行为。
32、进一步的,步骤s6具体如下:
33、s61:采用流媒体服务获取对应摄像设备实时视频流;
34、s62:设置实时视频流采样周期,获取待识别图片;
35、s63:根据不同违规行为配置对应的识别模型与分析程序,对s62中获取的待识别图片进行人员行为分析;
36、s64:根据人员行为分析结果,判断是否存在违规行为。
37、进一步的,步骤s63具体如下:
38、s631:根据现场实际安全管控需求,确定基于深度学习的视觉算法;其中,现场实际安全管控需求包括人员摔倒、单人作业、安全帽佩戴、工作服穿戴、吸烟和烟火的识别;
39、s632:利用数据集,对视觉算法的算法架构进行训练,对人员行为图像进行分析,并对结果进行评估;
40、s633:根据评估结果,确定是否重新采样优化训练;
41、s634:重复步骤s632和s633,得到人员行为分析模型,对人员行为进行分析,判断是否存在违规行为。
42、进一步的,步骤s7具体如下:
43、s71:搭建智能作业安全管控硬件系统与软件系统;
44、s72:将步骤6确定的违规行为上送系统,存储违规行为的视频与图片,并支持记录下载。
45、本发明所述基于人员行为分析与位置跟踪的智能作业安全管控系统,包括:摄像设备,用于对人员行为进行采集;流媒体服务器,用于获取视频流和对摄像设备进行控制;视频分析服务器,用于对采集的图像进行训练或者推理分析;系统服务器,用于执行实现权上述方法的步骤,实现系统的执行逻辑。
46、有益效果:本发明与现有技术相比,其显著优点是:1、本发明采用视觉技术进行人员行为分析与位置跟踪,结合基于深度学习的视觉算法,对人员行为进行实时分析,判断是否存在违规行为,实现智能化的作业安全管控;2、本发明能够精确跟踪人员位置,对人员作业行为进行分析识别,记录违规行为,针对不同人员行为场景选用对应的算法架构,对违规行为进行鉴别,具有精度高、效率快、识别准等特点,同时还支持模型优化训练,增强系统鲁棒性,可以有效提高作业安全管控效率,减少人力成本。
技术特征:1.一种基于人员行为分析与位置跟踪的智能作业安全管控方法,其特征在于,包括如下步骤:
2.根据权利要求1所述基于人员行为分析与位置跟踪的智能作业安全管控方法,其特征在于,步骤s1具体如下:
3.根据权利要求2所述基于人员行为分析与位置跟踪的智能作业安全管控方法,其特征在于,步骤s2具体如下:
4.根据权利要求3所述基于人员行为分析与位置跟踪的智能作业安全管控方法,其特征在于,步骤s3具体如下:
5.根据权利要求4所述基于人员行为分析与位置跟踪的智能作业安全管控方法,其特征在于,步骤s4具体如下:
6.根据权利要求5所述基于人员行为分析与位置跟踪的智能作业安全管控方法,其特征在于,步骤s5具体如下:
7.根据权利要求6所述基于人员行为分析与位置跟踪的智能作业安全管控方法,其特征在于,步骤s6具体如下:
8.根据权利要求7所述基于人员行为分析与位置跟踪的智能作业安全管控方法,其特征在于,步骤s63具体如下:
9.根据权利要求8所述基于人员行为分析与位置跟踪的智能作业安全管控方法,其特征在于,步骤s7具体如下:
10.一种基于人员行为分析与位置跟踪的智能作业安全管控系统,其特征在于,包括:摄像设备,用于对人员行为进行采集;流媒体服务器,用于获取视频流和对摄像设备进行控制;视频分析服务器,用于对采集的图像进行训练或者推理分析;系统服务器,用于执行实现权利要求1—7任一项所述方法的步骤,实现系统的执行逻辑。
技术总结本发明公开了一种基于人员行为分析与位置跟踪的智能作业安全管控方法及系统,所述方法,通过构建作业区域的三维坐标系,在坐标系中确定摄像设备位置和作业区域进出口位置,根据位置信息初始化摄像设备拍摄角度和扫描三维区域范围;识别人员并在三维坐标系中对其标定坐标,控制对应摄像设备进行人员跟踪;设定风险管控区域,根据人员位置信息判断是否存在越界行为;采用基于深度学习的视觉算法,对人员行为进行实时分析,判断是否存在违规行为。本发明采用视觉技术进行人员行为分析与位置跟踪,精确跟踪人员位置,结合基于深度学习的视觉算法,对人员行为进行实时分析,判断是否存在违规行为,实现智能化的作业安全管控。技术研发人员:李泽龙,张滔,陈球,于莹莹,陆炳辰受保护的技术使用者:国电南瑞南京控制系统有限公司技术研发日:技术公布日:2025/1/6本文地址:https://www.jishuxx.com/zhuanli/20250110/353736.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。