一种基于行走效能匹配的智能电动割草机控制方法与流程
- 国知局
- 2025-01-10 13:37:41
本发明涉及割草机控制,尤其涉及一种基于行走效能匹配的智能电动割草机控制方法。
背景技术:
1、割草机作为一种园林工具被广泛应用于草坪、植被的修剪等领域,现有的割草机通常包括手持式割草机和骑乘式割草机,按照能源系统主要分为电动式割草机和燃油式割草机。
2、目前,农业设备智能化程度较低,通常以柴油机拖拉式割草机为主,市面上现有新能源割草机对实际工况无差别分析。对应不同场景使用同一套参数配置无自适应调节,会造成动力不足割草效果差或者能耗匹配过剩导致能耗浪费问题。
技术实现思路
1、本发明的目的在于提供一种基于行走效能匹配的智能电动割草机控制方法,旨在解决现有的割草机控制方法对应不同场景使用同一套参数配置导致能耗匹配过剩造成能耗浪费问题。
2、为实现上述目的,本发明提供了一种基于行走效能匹配的智能电动割草机控制方法,包括以下步骤:
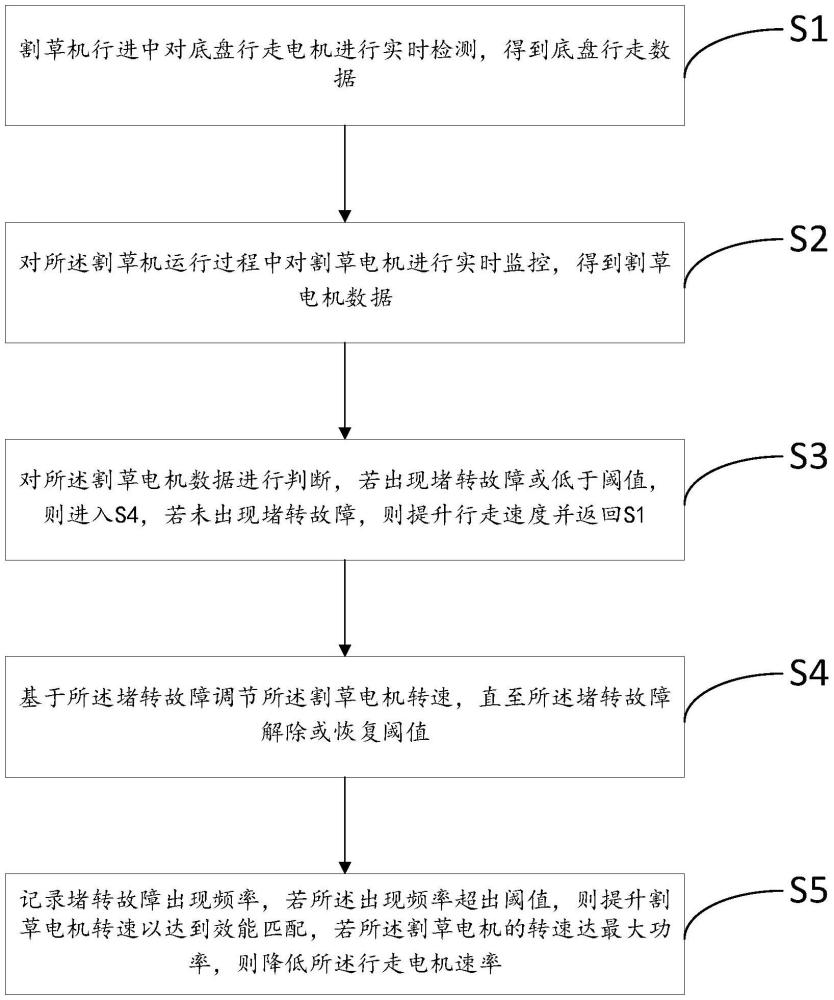
3、s1割草机行进中对底盘行走电机进行实时检测,得到底盘行走数据;
4、s2对所述割草机运行过程中对割草电机进行实时监控,得到割草电机数据;
5、s3对所述割草电机数据进行判断,若出现堵转故障或低于阈值,则进入s4,若未出现堵转故障,则提升行走速度并返回s1;
6、s4基于所述堵转故障调节所述割草电机转速,直至所述堵转故障解除或恢复阈值;
7、s5记录堵转故障出现频率,若所述出现频率超出阈值,则提升割草电机转速以达到效能匹配,若所述割草电机的转速达最大功率,则降低所述行走电机速率。
8、其中,在“割草机行进中对底盘行走电机进行实时检测,得到底盘行走数据”中,包括:
9、割草机在行进过程中采集行走电机的扭矩数据、转速数据和电流数据;
10、can总线实时将所述扭矩数据、所述转速数据和所述电流数据发送给控制系统;
11、所述控制系统以100hz的频率读取并解析所述扭矩数据、所述转速数据和所述电流数据,得到底盘行走数据。
12、其中,在“对所述割草机运行过程中对割草电机进行实时监控,得到割草电机数据”中,包括:
13、采集所述割草电机运行过程中的扭矩数据、转速数据和电流数据;
14、can总线实时将所述扭矩数据、所述转速数据和所述电流数据发送给控制系统;
15、所述控制系统以100hz的频率读取并解析所述扭矩数据、所述转速数据和所述电流数据,得到割草电机数据。
16、其中,在“对所述割草电机数据进行判断,若出现堵转故障或低于阈值,则进入s4,若未出现堵转故障,则提升行走速度并返回s1”中,包括:
17、基于所述割草电机数据进行判断,若所述割草电机的扭矩值大于75nm持续3秒或者报出堵转故障,则降低所述行走电机速率进入s4,若所述割草电机的扭矩低于阈值,则提升所述行走电机的行走速率,并返回s1。
18、其中,在“基于所述割草电机数据进行判断,若所述割草电机的扭矩值大于75nm持续3秒或者报出堵转故障,则降低所述行走电机速率进入s4,若所述割草电机的扭矩低于阈值,则提升所述行走电机的行走速率,并返回s1”中,所述阈值为30nm。
19、其中,在“基于所述堵转故障调节所述割草电机转速,直至所述堵转故障解除或恢复阈值”中,所述阈值为60nm。
20、其中,在“记录堵转故障出现频率,若所述出现频率超出阈值,则提升割草电机转速以达到效能匹配,若所述割草电机的转速达最大功率,则降低所述行走电机速率。”中,所述堵转故障的出现频率阈值为10次/小时。
21、本发明的一种基于行走效能匹配的智能电动割草机控制方法,包括以下步骤:s1割草机行进中对底盘行走电机进行实时检测,得到底盘行走数据;s2对所述割草机运行过程中对割草电机进行实时监控,得到割草电机数据;s3对所述割草电机数据进行判断,若出现堵转故障或低于阈值,则进入s4,若未出现堵转故障,则提升行走速度并返回s1;s4基于所述堵转故障调节所述割草电机转速,直至所述堵转故障解除或恢复阈值;s5记录堵转故障出现频率,若所述出现频率超出阈值,则提升割草电机转速以达到效能匹配,若所述割草电机的转速达最大功率,则降低所述行走电机速率。本方法通过行走电机参数闭环检测,割草机参数闭环检测,通过对割草机内部采集参数解析,自动完成对实况环境杂草的质量硬度分析并实时更新,对应控制方式上采取推杆升降控制、行走降速/割草机扭矩输出控制的自动调节,实现行走与割草机的最佳效能匹配,且自适应与各类杂草环境,适应性强,从而解决了现有的割草机控制方法对应不同场景使用同一套参数配置导致能耗匹配过剩造成能耗浪费问题。
技术特征:1.一种基于行走效能匹配的智能电动割草机控制方法,其特征在于,包括以下步骤:
2.如权利要求1所述的基于行走效能匹配的智能电动割草机控制方法,其特征在于,在“割草机行进中对底盘行走电机进行实时检测,得到底盘行走数据”中,包括:
3.如权利要求1所述的基于行走效能匹配的智能电动割草机控制方法,其特征在于,在“对所述割草机运行过程中对割草电机进行实时监控,得到割草电机数据”中,包括:
4.如权利要求1所述的基于行走效能匹配的智能电动割草机控制方法,其特征在于,在“对所述割草电机数据进行判断,若出现堵转故障或低于阈值,则进入s4,若未出现堵转故障,则提升行走速度并返回s1”中,包括:
5.如权利要求4所述的基于行走效能匹配的智能电动割草机控制方法,其特征在于,在“基于所述割草电机数据进行判断,若所述割草电机的扭矩值大于75nm持续3秒或者报出堵转故障,则降低所述行走电机速率进入s4,若所述割草电机的扭矩低于阈值,则提升所述行走电机的行走速率,并返回s1”中,所述阈值为30nm。
6.如权利要求1所述的基于行走效能匹配的智能电动割草机控制方法,其特征在于,在“基于所述堵转故障调节所述割草电机转速,直至所述堵转故障解除或恢复阈值”中,所述阈值为60nm。
7.如权利要求1所述的基于行走效能匹配的智能电动割草机控制方法,其特征在于,在“记录堵转故障出现频率,若所述出现频率超出阈值,则提升割草电机转速以达到效能匹配,若所述割草电机的转速达最大功率,则降低所述行走电机速率。”中,所述堵转故障的出现频率阈值为10次/小时。
技术总结本发明涉及割草机控制技术领域,具体涉及一种基于行走效能匹配的智能电动割草机控制方法,本方法通过行走电机参数闭环检测,割草机参数闭环检测,通过对割草机内部采集参数解析,自动完成对实况环境杂草的质量硬度分析并实时更新,对应控制方式上采取推杆升降控制、行走降速/割草机扭矩输出控制的自动调节,实现行走与割草机的最佳效能匹配,且自适应与各类杂草环境,适应性强,从而解决了现有的割草机控制方法对应不同场景使用同一套参数配置导致能耗匹配过剩造成能耗浪费问题。技术研发人员:邹才东,唐泽伟,曾万连,朱义坤,陈卿云受保护的技术使用者:重庆廷捷机器人有限公司技术研发日:技术公布日:2025/1/6本文地址:https://www.jishuxx.com/zhuanli/20250110/354344.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。