-

六自由度环境下基于双延时确定策略梯度的空战决策方法
本发明属于无人机控制领域,具体涉及一种六自由度环境下基于双延时确定策略梯度的空战决策方法。背景技术:1、目前,无人战机(unmanned combat air vehicle,ucav)已在军事领域中......
-

一种基于深度强化学习的智能空战决策方法及系统
本发明属于智能空战决策领域,具体涉及一种基于深度强化学习的智能空战决策方法及系统。背景技术:1、随着现代战争的信息化和智能化,迫切需要提高战场信息感知能力和快速生成策略能力,以适应高速、复杂、多变的战......
-
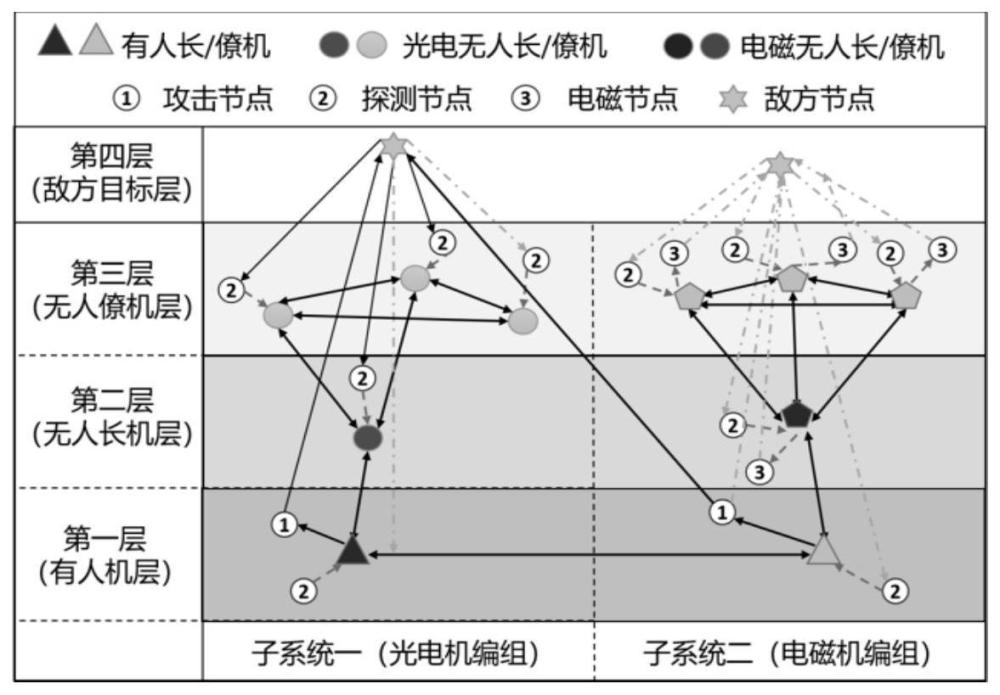
一种有无人协同空战编队复杂网络建模方法
本发明涉及有人/无人协同空战网络化建模,尤其涉及一种有无人协同空战编队复杂网络建模方法。背景技术:1、随着军事智能的高速发展,未来战争的模式趋向于信息化、集群化和网络化的体系对抗。面向空域作战对抗、威......
技术新讯 > 空战 > 列表
 2024-07-31
2024-07-31精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -
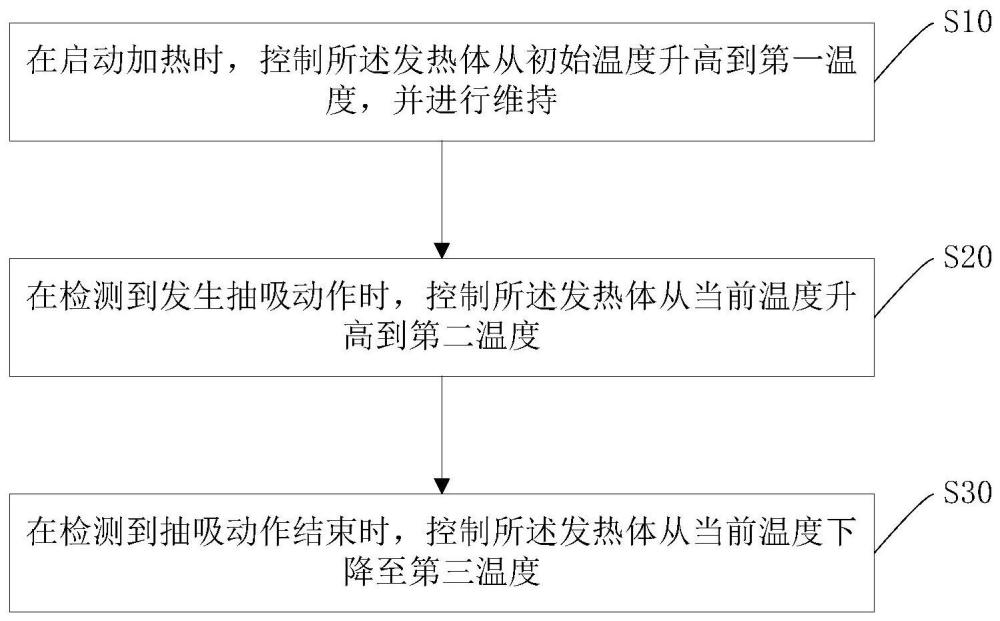
发热体、加热不燃烧装置及其加热控制方法与流程
2024-11-19 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01