-

六足四扑翼微型无尾飞爬一体机器人及其工作方法
本发明涉及仿生机器人,具体地,涉及一种六足四扑翼微型无尾飞爬一体机器人及其工作方法,尤其是一种仿生六足爬行与无尾四翅飞行以及飞爬两种运动模式转换的一体机器人及其工作方法。背景技术:1、六足四扑翼微型无......
技术新讯 > 无尾 > 列表
 2024-08-01
2024-08-01精选技术
-
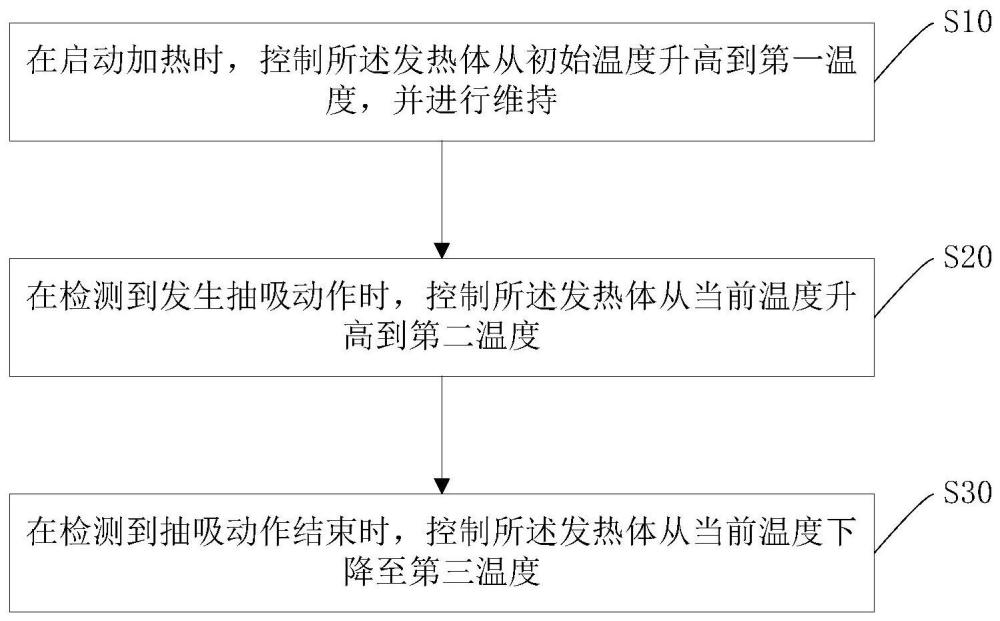
发热体、加热不燃烧装置及其加热控制方法与流程
2024-11-19 -

一种大容纳的紧急物资装备包的制作方法
2024-07-05 -
一种踏板感模拟器及汽车的制作方法
2024-08-02 -

一种隐藏式消火栓箱的制作方法
2024-07-05 -
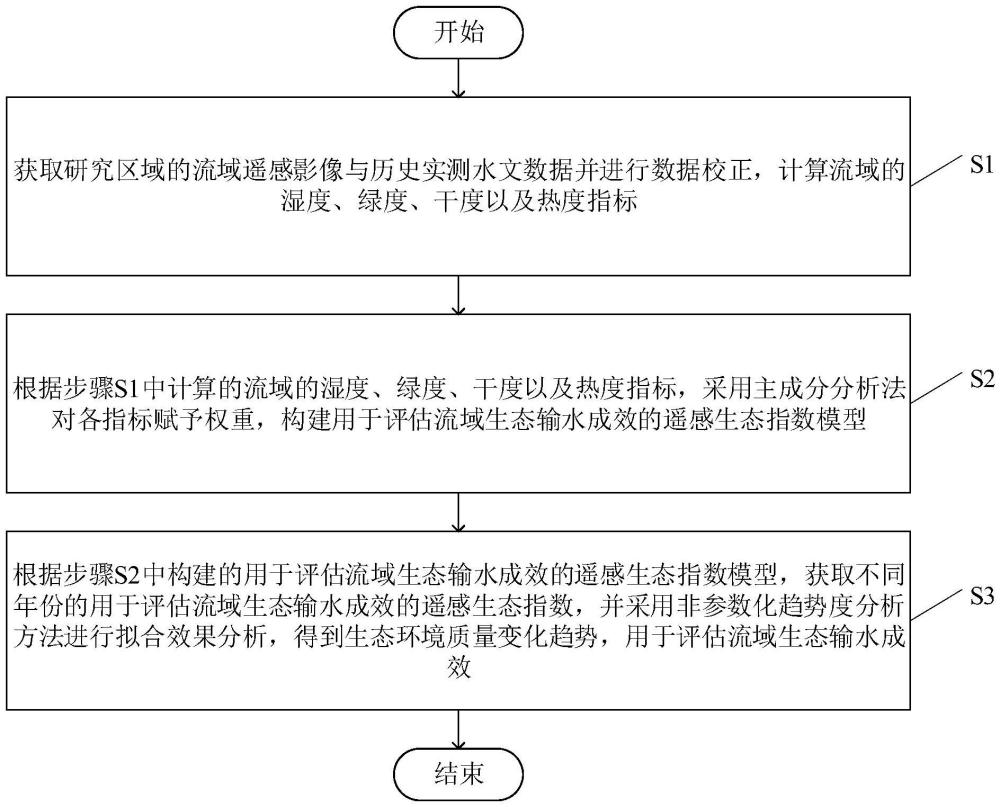
一种流域生态输水成效评估方法
2024-12-06 -

用于T梁转运的装置及方法与流程
2024-08-02 -

船艏导缆孔连接过渡装置的制作方法
2024-08-01 -
一种MEMS触觉传感器及其制作方法与流程
2024-07-27 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15