1.本发明涉及车辆技术领域,更具体而言,涉及一种用于车辆启停控制的辅助驾驶系统、包括其的车辆及相应的方法和计算机可读存储介质。
背景技术:
2.车辆在道路上行驶时,由于交通堵塞等情况导致车辆经常停车和起步。针对这种车辆经常启停的情况,如果车辆根据自适应巡航控制(adaptive cruise control,简称acc)进行行驶,由于acc功能自身的延时特性,会导致车辆的起步响应滞后,从而使得车辆在acc状态下的起步表现不佳。
3.因此,需要一种改善的控制车辆启停的技术方案。
技术实现要素:
4.为解决上述技术问题,本发明提出了一种用于车辆启停控制的辅助驾驶方案,至少旨在一定程度上减少车辆在起步时的响应时间,改善对车辆的启停控制。
5.作为本发明的第一方面,提供一种用于车辆启停控制的辅助驾驶系统,其中,所述系统包括:
6.信息获取单元,被配置用于:
7.获取当前车辆、与当前车辆位于同一车道且在当前车辆前方的第一交通参与者、和与当前车辆位于同一车道且在该第一交通参与者前方的第二交通参与者的行驶相关信息,以及
8.获取所述当前车辆的与启停控制相关的预设参数;
9.控制单元,被配置用于:
10.在当前车辆停止行进时,基于所述第二交通参与者的行驶相关信息判断所述第二交通参与者是否启动,如果判断所述第二交通参与者启动,则控制所述当前车辆以预设的初始加速度启动,以及
11.在当前车辆以预设的初始加速度启动后,在一监测时间内监测所述第一交通参与者是否也启动,响应于所述第一交通参与者在所述监测时间内是否启动的监测结果调整所述当前车辆的行驶状态,
12.其中,所述监测时间是根据所述当前车辆、所述第一交通参与者和所述第二交通参与者的行驶相关信息以及预设参数中的一个或多个确定的。
13.在一个实施方案中,所述行驶相关信息至少包括以下一个或多个:所述当前车辆的速度v
x_ego
、所述第一交通参与者的速度v
x_wzo
、所述第二交通参与者的速度v
x_vzo
、所述当前车辆与所述第一交通参与者处于待启动状态时它们之间的等待距离d
x_wzo_standstill
、所述当前车辆与所述第一交通参与者之间的实时距离d
x_wzo
、和/或用于跟随控制的所述当前车辆相对于所述第一交通参与者的第一期望距离d
x_desired_acc
;以及
14.所述预设参数至少包括以下一个或多个:所述当前车辆与第一交通参与者之间的
安全距离系数p
_f_d_gap
、响应延迟时间p
_t_offset
、加速时间百分比p
_f_t_accel
、所述当前车辆启动时的初始加速度p
_ax_pre_drive_off-initial
和/或所述当前车辆重新启动预期达到的最大速度p
_v_pre_restart_max
。
15.在一个实施方案中,所述监测时间通过以下公式(1)和(2)确定:
16.t
_monitor
=sqrt(2*d
_gap
/p
_ax_pre_drive_off-initial
) p
_t_offset
ꢀꢀ
(1);
17.d
_gap
=p
_f_d_gap
*d
x_wzo_standstill
ꢀꢀ
(2);
18.其中,t
_monitor
是所述监测时间,d
_gap
是所述当前车辆与所述第一交通参与者之间的安全距离,p
_ax_pre_drive_off-initial
是所述当前车辆启动时的初始加速度,p
_t_offset
是响应延迟时间,p
_f_d_gap
是所述当前车辆与第一交通参与者之间的安全距离系数,d
x_wzo_standstill
是所述当前车辆与所述第一交通参与者处于待启动状态时它们之间的等待距离。
19.在一个实施方案中,所述监测时间包括加速监测时间和减速监测时间,所述在一监测时间内监测所述第一交通参与者是否也启动包括:监测在所述加速监测时间t
_monitor_accel
内所述第一交通参与者的速度v
x_wzo
是否大于零;
20.所述控制单元被进一步配置为:
21.响应于在所述加速监测时间t
_monitor_accel
内所述第一交通参与者的速度v
x_wzo
大于零,则至少基于所述当前车辆重新启动预期达到的最大速度p
_v_pre_restart_max
计算第一目标加速度,然后控制所述当前车辆以该第一目标加速度加速至所述最大速度p
_v_pre_restart_max
并保持该最大速度p
_v_pre_restart_max
直至所述当前车辆与所述第一交通参与者之间的实时距离d
x_wzo
接近或等于用于跟随控制的所述当前车辆相对于所述第一交通参与者的第一期望距离d
x_desired_acc
;和/或
22.响应于在所述加速监测时间t
_monitor_accel
内所述第一交通参与者的速度v
x_wzo
不大于零,控制所述当前车辆在减速监测时间t
_monitor_decel
内以目标减速度减速,其中,
23.如果在所述当前车辆减速至停车之前所述第一交通参与者在所述减速监测时间t
_monitor_decel
内启动,则至少基于所述当前车辆重新启动预期达到的最大速度p
_v_pre_restart_max
计算第二目标加速度,然后控制所述当前车辆以该第二目标加速度加速至所述最大速度p
_v_pre_restart_max
并保持该最大速度p
_v_pre_restart_max
直至所述当前车辆与所述第一交通参与者之间的实时距离d
x_wzo
接近或等于用于跟随控制的所述当前车辆相对于所述第一交通参与者的第一期望距离d
x_desired_acc
;
24.如果在所述当前车辆减速至停车之前所述第一交通参与者在所述减速监测时间t
_monitor_decel
内未启动,则控制所述当前车辆停车等待。
25.作为本发明的第二方面,提供一种车辆,其中,所述车辆包括上述任一项所述的辅助驾驶系统。
26.作为本发明的第三方面,提供一种用于车辆启停控制的辅助驾驶方法,其中,所述辅助驾驶方法包括:
27.获取当前车辆、与当前车辆位于同一车道且在当前车辆前方的第一交通参与者、和与当前车辆位于同一车道且在该第一交通参与者前方的第二交通参与者的行驶相关信息,以及获取所述当前车辆的与启停控制相关的预设参数;
28.在当前车辆停止行进时,基于所述第二交通参与者的行驶相关信息判断所述第二交通参与者是否启动,如果判断所述第二交通参与者启动,则控制所述当前车辆以预设的
初始加速度启动,以及在当前车辆以预设的初始加速度启动后,在一监测时间内监测所述第一交通参与者是否也启动,响应于所述第一交通参与者在所述监测时间内是否启动的监测结果调整所述当前车辆的行驶状态,
29.其中,所述监测时间是根据所述当前车辆、所述第一交通参与者和所述第二交通参与者的行驶相关信息以及预设参数中的一个或多个确定的。
30.在一个实施方案中,所述行驶相关信息至少包括以下一个或多个:所述当前车辆的速度v
x_ego
、所述第一交通参与者的速度v
x_wzo
、所述第二交通参与者的速度v
x_vzo
、所述当前车辆与所述第一交通参与者处于待启动状态时它们之间的等待距离d
x_wzo_standstill
、所述当前车辆与所述第一交通参与者之间的实时距离d
x_wzo
、和/或用于跟随控制的所述当前车辆相对于第一交通参与者的第一期望距离d
x_desired_acc
;以及
31.所述预设参数至少包括以下一个或多个:所述当前车辆与第一交通参与者之间的安全距离系数p
_f_d_gap
、响应延迟时间p
_t_offset
、加速时间百分比p
_f_t_accel
、所述当前车辆启动时的初始加速度p
_ax_pre_drive_off-initial
和/或所述当前车辆重新启动预期达到的最大速度p
_v_pre_restart_max
。
32.在一个实施方案中,所述监测时间通过以下公式(1)和(2)确定:
33.t
_monitor
=sqrt(2*d
_gap
/p
_ax_pre_drive_off-initial
) p
_t_offset
ꢀꢀ
(1);
34.d
_gap
=p
_f_d_gap
*d
x_wzo_standstill
ꢀꢀ
(2);
35.其中,t
_monitor
是所述监测时间,d
_gap
是所述当前车辆与所述第一交通参与者之间的安全距离,p
_ax_pre_drive_off-initial
是所述当前车辆启动时的初始加速度,p
_t_offset
是响应延迟时间,p
_f_d_gap
是所述当前车辆与第一交通参与者之间的安全距离系数,d
x_wzo_standstill
是所述当前车辆与所述第一交通参与者处于待启动状态时它们之间的等待距离;
36.优选地,所述监测时间t
_monitor
包括加速监测时间t
_monitor_accel
和减速监测时间t
_monitor_decel
,所述加速监测时间t
_monitor_accel
为所述监测时间t
_monitor
与加速时间百分比p
_f_t_accel
的乘积,所述减速监测时间t
_monitor_decel
为所述监测时间t
_monitor
与系数(1-p
_f_t_accel
)的乘积。
37.在一个实施方案中,所述监测时间包括加速监测时间和减速监测时间,在当前车辆以预设的初始加速度启动后所述在一监测时间内监测所述第一交通参与者是否也启动,包括:监测在所述加速监测时间t
_monitor_accel
内所述第一交通参与者的速度v
x_wzo
是否大于零;
38.所述响应于所述第一交通参与者在所述监测时间内是否启动的监测结果调整所述当前车辆的行驶状态,包括:
39.响应于在所述加速监测时间t
_monitor_accel
内,所述第一交通参与者的速度v
x_wzo
大于零,则至少基于所述当前车辆重新启动预期达到的最大速度p
_v_pre_restart_max
计算第一目标加速度,然后控制所述当前车辆以该第一目标加速度加速至所述最大速度p
_v_pre_restart_max
并保持该最大速度p
_v_pre_restart_max
直至所述当前车辆与所述第一交通参与者之间的实时距离d
x_wzo
接近或等于用于跟随控制的所述当前车辆相对于所述第一交通参与者的第一期望距离d
x_desired_acc
;和/或
40.响应于在所述加速监测时间t
_monitor_accel
内所述第一交通参与者的速度v
x_wzo
不大于零,控制所述当前车辆在减速监测时间t
_monitor_decel
内以目标减速度减速,其中,
41.如果在所述当前车辆减速至停车之前所述第一交通参与者在所述减速监测时间t
_monitor_decel
内启动,则至少基于所述当前车辆重新启动预期达到的最大速度p
_v_pre_restart_max
计算第二目标加速度,然后控制所述当前车辆以该第二目标加速度加速至所述最大速度p
_v_pre_restart_max
并保持该最大速度p
_v_pre_restart_max
直至所述当前车辆与所述第一交通参与者之间的实时距离d
x_wzo
接近或等于用于跟随控制的所述当前车辆相对于所述第一交通参与者的第一期望距离d
x_desired_acc
;
42.如果在所述当前车辆减速至停车之前所述第一交通参与者在所述减速监测时间t
_monitor_decel
内未启动,则控制所述当前车辆停车等待。
43.作为本发明的第四方面,提供一种计算机可读存储介质,其上存储有计算机程序,其中,所述计算机程序在被处理器执行时实现上述任一项所述的辅助驾驶方法。
44.利用本发明的技术方案,对于具有自适应巡航控制功能的车辆,在面临交通拥堵等情况而导致需要频繁启停时,可以在监测时间内根据当前车辆前方的第一交通参与者(例如,前车)以及第二交通参与者(例如,前前车)的行驶相关信息,而调整当前车辆的行驶状态。尤其是在减速监测时间内,当前车辆可在减速过程中根据前车情况及时重新加速,从而缩短车辆的响应时间,进而使得车辆在整个“停车-起步”过程中的起步响应更快并且更平缓,改善车辆用户的乘车体验。
附图说明
45.以示例的方式参考以下附图描述本发明的非限制性且非穷举性实施方案,其中:
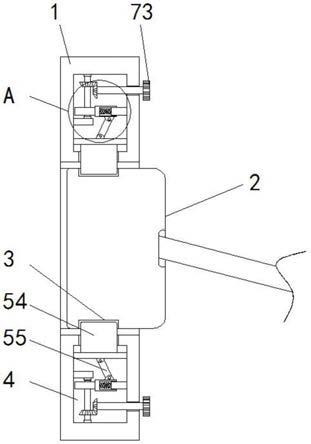
46.图1示出根据本发明一实施方案的用于车辆启停控制的辅助驾驶系统的示意图;
47.图2示出根据本发明一实施方案的用于车辆启停控制的辅助驾驶方法的流程图;
48.图3a和图3b示出根据本发明一实施方案的用于车辆启停控制的辅助驾驶系统和/或方法的应用示意图。
具体实施方式
49.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施方案对本技术进行进一步详细说明。应当理解,此处描述的具体实施方案仅仅用以解释本技术,并不用于限定本技术。
50.作为本发明的第一方面,图1示出根据本发明一实施方案的用于车辆启停控制的辅助驾驶系统100。具体地,所述辅助驾驶系统100包括信息获取单元110和控制单元120,并且二者之间可通信地耦合。
51.信息获取单元110可以被配置为:获取当前车辆、与当前车辆位于同一车道且在当前车辆前方的第一交通参与者、和当前车辆位于同一车道且在该第一交通参与者前方的第二交通参与者的行驶相关信息,以及获取所述当前车辆的与启停控制相关的预设参数。例如,所述第一交通参与者可以是与当前车辆紧邻的前方车辆(简称为“前车”),所述第二交通参与者可以是与该前方车辆紧邻的位于当前车辆前前方的车辆(简称为“前前车”)。当然,所述第二交通参与者也可以是与当前车辆位于同一车道且在该车道的队首的头车,在这种情况下,可以借助车联网通信方式获取该第二交通参与者的行驶相关信息,并且需要根据本文描述的计算方式相应地调整计算参数以获取预期的判断效果。
52.如能理解的,信息获取单元110可通过多种可用的方式获取所述行驶相关信息和所述当前车辆的与启停控制相关的预设参数。例如,参照图3a,在一个实施例中,信息获取单元110可以通过设置在当前车辆上的检测装置来获取当前车辆、第一交通参与者和/或第二交通参与者的行驶相关信息。在另一个实施例中,信息获取单元110也可以通过与当前车辆的中央控制系统或者自动驾驶辅助系统(例如自适应巡航系统acc)通信来获取关于当前车辆的与启停控制相关的预设参数。或者,信息获取单元110也可以设置在远程服务器上并且能够与当前车辆的检测装置或者中央控制系统通信,以间接获取所述行驶相关信息和当前车辆的与启停控制相关的预设参数。例如,信息获取单元110可以与所述当前车辆、所述第一交通参与者、所述第二交通参与者、道路基础设施和/或安装在所述当前车辆、所述第一交通参与者以及所述第二交通参与者上的检测装置通信,以获取所述当前车辆、所述第一交通参与者和/或所述第二交通参与者的行驶相关信息和所需要的所述当前车辆的预设参数。
53.所述检测装置可以为安装在车辆上的各种传感器,所述传感器例如可以包括激光雷达、毫米波雷达、超声波传感器或者任何其他合适的传感器,或其任意组合。所述信息获取单元110可以根据需要通过任意合适的方式实现通信。例如,所述信息获取单元110可以利用移动网络(例如4g、5g)或者wi-fi等与所述当前车辆、第一交通参与者和/或第二交通参与者建立无线通信。
54.所述交通参与者可以包括机动车辆、摩托车或自行车等,或者可被传感器监测到的其他类型的交通参与者。
55.所述行驶相关信息可以至少包括以下一个或多个:所述当前车辆的速度v
x_ego
、所述第一交通参与者的速度v
x_wzo
、所述第二交通参与者的速度v
x_vzo
、所述当前车辆与所述第一交通参与者处于待启动状态时它们之间的等待距离d
x_wzo_standstill
、所述当前车辆与所述第一交通参与者之间的实时距离d
x_wzo
、和/或用于跟随控制的所述当前车辆相对于所述第一交通参与者的第一期望距离d
x_desired_acc
。
56.所述预设参数可以至少包括以下一个或多个:所述当前车辆与第一交通参与者之间的安全距离系数p
_f_d_gap
、响应延迟时间p
_t_offset
、加速时间百分比p
_f_t_accel
、所述当前车辆启动时的初始加速度p
_ax_pre_drive_off-initial
和/或所述当前车辆重新启动预期达到的最大速度p
_v_pre_restart_max
。需要说明的是,上述预设参数可以是例如安装在车辆上的acc系统自己设定的,也可是根据经验值或者用户需求而预定的,本发明对这些预设参数的大小不做限定。例如,仅为了示例说明,安全距离系数p
_f_d_gap
的取值可以为0.8,延迟时间p
_t_offset
的取值可以为0.8秒,初始加速度p
_ax_pre_drive_off-initial
的取值可以为0.5m/s2。
57.控制单元120可以被配置用于:在当前车辆停止行进时,基于所述第二交通参与者的行驶相关信息判断所述第二交通参与者是否启动,如果判断所述第二交通参与者启动,则控制所述当前车辆以预设的初始加速度启动,以及在当前车辆以预设的初始加速度启动后,在一监测时间内监测所述第一交通参与者是否也启动,响应于所述第一交通参与者在所述监测时间内是否启动的监测结果调整所述当前车辆的行驶状态,其中,所述监测时间是根据所述当前车辆、所述第一交通参与者和所述第二交通参与者的行驶相关信息以及预设参数中的一个或多个确定的。
58.如能理解的,控制单元120可通过判断第二交通参与者的速度v
x_vzo
是否大于零判
断所述第二交通参与者是否启动,例如,当所述第二交通参与者的速度v
x_vzo
大于零时,则判断所述第二交通参与者启动,反之,则判断所述第二交通参与者未启动。
59.在一个实施方案中,所述监测时间可通过以下公式(1)和(2)确定:
60.t
_monitor
=sqrt(2*d
_gap
/p
_ax_pre_drive_off-initial
) p
_t_offset
ꢀꢀ
(1);
61.d
_gap
=p
_f_d_gap
*d
x_wzo_standstill
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2);
62.其中,t
_monitor
是所述监测时间,d
_gap
是所述当前车辆与所述第一交通参与者之间的安全距离,p
_ax_pre_drive_off-initial
是所述当前车辆启动时的初始加速度,p
_t_offset
是响应延迟时间,p
_f_d_gap
是所述当前车辆与第一交通参与者之间的安全距离系数,d
x_wzo_standstill
是所述当前车辆与所述第一交通参与者处于待启动状态时它们之间的等待距离。
63.参照公式(1)和(2)所示,将所述等待距离d
x_wzo_standstill
和所述当前车辆与第一交通参与者之间的安全距离系数p
_f_d_gap
的乘积作为所述当前车辆与所述第一交通参与者之间的安全距离d
_gap
,将两倍的所述安全距离d
_gap
除以所述当前车辆启动时的初始加速度p
_ax_pre_drive_off-initial
所得结果开平方,然后加上所述延迟时间p
_t_offset
作为所述监测时间t
_monitor
。
64.优选地,所述监测时间t
_monitor
包括加速监测时间t
_monitor_accel
和减速监测时间t
_monitor_decel
,所述加速监测时间t
_monitor_accel
和减速监测时间t
_monitor_decel
可通过以下公式(3)和(4)来确定:
65.t
_monitor_accel
=t
_monitor
*p
_f_t_accel
ꢀꢀꢀ
(3);
66.t
_monitor_decel
=t
_monitor
*(1-p
_f_t_accel
)
ꢀꢀ
(4);
67.如上述公式(3)和(4)所示,所述加速监测时间t
_monitor_accel
为所述监测时间t
_monitor
与加速时间百分比p
_f_t_accel
的乘积,所述减速监测时间t
_monitor_decel
为所述监测时间t
_monitor
与系数(1-p
_f_t_accel
)的乘积。
68.基于此,所述在监测时间内监测所述第一交通参与者是否也启动的方案可通过以下实施例实现:控制单元120判断在所述加速监测时间t
_monitor_accel
内所述第一交通参与者的速度v
x_wzo
是否大于零,若是,则判断所述第一交通参与者启动,若否,则判断所述第一交通参与者未启动。
69.进一步地,控制单元120可以根据第一交通参与者在所述监测时间内监测结果的不同情况,以合适的方式调整所述当前车辆的行驶状态。
70.例如,在一种情况(i)下:
71.参照图3a和3b,在当前车辆的一个“停车-起步”过程中,响应于在所述加速监测时间t
_monitor_accel
内所述第一交通参与者的速度v
x_wzo
大于零(即所述第一交通参与者在所述加速监测时间t
_monitor_accel
内启动),控制单元120可至少基于所述当前车辆重新启动预期达到的最大速度p
_v_pre_restart_max
计算第一目标加速度,然后控制所述当前车辆以该第一目标加速度加速至所述最大速度p
_v_pre_restart_max
并保持该最大速度p
_v_pre_restart_max
直至所述当前车辆与所述第一交通参与者之间的实时距离d
x_wzo
接近或等于用于跟随控制的所述当前车辆相对于所述第一交通参与者的第一期望距离d
x_desired_acc
。优选地,在这种情况下,一旦所述当前车辆与所述第一交通参与者之间的实时距离d
x_wzo
接近或等于用于跟随控制的所述当前车辆相对于所述第一交通参与者的第一期望距离d
x_desired_acc
,则可以使当前车辆转到传统的acc控制模式下,开启与前车的自动跟随行驶功能。在一个实施例中,所述第一期
望距离d
x_desired_acc
可以是例如传统的车辆acc控制中采用的当前车辆与前方车辆之间的跟随距离。进一步地,所述当前车辆的acc控制模式可以至少基于所述实时距离d
x_wzo
计算该当前车辆的跟随目标加速度,并控制当前车辆以所述跟随目标加速度继续行驶。
72.如能理解的,控制单元120可基于当前车辆重新启动预期达到的所述最大速度p
_v_pre_restart_max
通过合适的方式计算第一目标加速度。例如,控制单元120可以响应于第一交通参与者启动的时刻,确定加速监测时间t
_monitor_accel
内的剩余时间t'1,以及所述当前车辆的实时速度,然后可利用最大速度p
_v_pre_restart_max
与所述当前车辆的实时速度的差值除以剩余时间t'1,得到所述第一目标加速度。
73.参照图3b,在所述加速监测时间t
_monitor_accel
内,当前车辆的加速度(对应黑色实线部分)大于零。由于在图3b所示的加速监测时间t
_monitor_accel
内信息获取单元110监测到所述第一交通参与者已经启动,因此当前车辆已经重新启动加速,随后在减速监测时间t
_monitor_decel
内当前车辆的加速度(对应于图3b中减速监测时间t
_monitor_decel
内“第一交通参与者在加速监测时间t
_monitor_accel
内启动”的虚线部分)也大于零,因此当前车辆不需要减速制动,从而可节约在减速监测时间t
_monitor_decel
内调整当前车辆行驶参数的时间,进而使得当前车辆在情况(i)的整个“停车-起步”过程中的起步响应更快。
74.又例如,在另一种情况(ii)下:
75.参照图3a和图3b,在当前车辆的“停车-起步”过程中,响应于在所述加速监测时间t
_monitor_accel
内所述第一交通参与者不启动,控制单元120可以控制所述当前车辆在减速监测时间t
_monitor_decel
内以目标减速度a
x_aim
减速。其中,所述目标减速度a
x_aim
可通过以下公式(5)、(6)以及(7)进行计算:
76.a
x_aim
=(v
x_ego
*v
x_ego
)/(d
_gap_rest
*(-2))
ꢀꢀꢀ
(5);
77.d
_gap_rest
=d
x_wzo-d
x_desired
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6);
78.d
x_desired
=d
x_wzo_standstill
*(1-p
_f_d_gap
)
ꢀꢀꢀꢀꢀ
(7);
79.参照上述公式(5)、(6)以及(7)所示,利用所述等待距离d
x_wzo_standstill
与所述系数(1-p
_f_d_gap
)的乘积得到第二期望距离d
x_desired
,将所述实时距离d
x_wzo
减去所述第二期望距离d
x_desired
得到剩余安全距离d
_gap_rest
,以所述当前车辆的速度v
x_ego
的平方除以所述剩余安全距离d
_gap_rest
*(-2)所得结果作为所述目标减速度。优选地,所述目标减速度可以按照预设的减速度梯度p
_a_gradient
变化,所述减速度梯度p
_a_gradient
的值可以例如为0.5m/s3~1.5m/s3(优选为1.0m/s3)。这样可以使得当前车辆减速过程更加平缓,改善客户乘车体验并且提高安全性。
80.进一步地,情况(ii)可以包括情况(ii-1)和情况(ii-2)。
81.对于情况(ii-1),如果在所述当前车辆减速至停车之前所述第一交通参与者启动(即所述第一交通参与者在所述减速监测时间t
_monitor_decel
内启动),则可至少基于当前车辆重新启动预期达到的最大速度p
_v_pre_restart_max
计算第二目标加速度,然后控制所述当前车辆以该第二目标加速度加速至所述最大速度p
_v_pre_restart_max
并保持所述最大速度p
_v_pre_restart_max
,直至所述当前车辆与所述第一交通参与者之间的实时距离d
x_wzo
接近或等于用于跟随控制的所述当前车辆相对于所述第一交通参与者的第一期望距离d
x_desired_acc
。优选地,在这种情况下,一旦所述当前车辆与所述第一交通参与者之间的实时距离d
x_wzo
接近或等于用于跟随控制的所述当前车辆相对于所述第一交通参与者的第一期望距离dx_desired_acc
,则可以使当前车辆转到传统的acc控制模式下,开启与前车的自动跟随行驶功能。在一个实施例中,所述第一期望距离d
x_desired_acc
可以是例如传统的车辆acc控制中采用的当前车辆与前方车辆之间的跟随距离。进一步地,所述当前车辆的acc控制模式可以至少基于所述实时距离d
x_wzo
计算该当前车辆的跟随目标加速度,并控制当前车辆以所述跟随目标加速度继续行驶。
82.如能理解的,控制单元120可至少基于重新启动预期达到的所述最大速度p
_v_pre_restart_max
通过合适的方式计算第二目标加速度。例如,控制单元120可以响应于第一交通参与者启动的时刻,确定所述减速监测时间t
_monitor_decel
内的剩余时间t'2,以及所述当前车辆的实时速度,然后可利用最大速度p
_v_pre_restart_max
与所述当前车辆的实时速度的差值除以剩余时间t'2,得到所述第二目标加速度。
83.需要说明的是,本发明对于上述情况(i)和(ii)中所涉及的第一目标加速度和第二目标加速度的计算方式不作限定,本领域技术人员可以基于当前车辆重新启动预期达到的最大速度p
_v_pre_restart_max
采用本领域其他可用的或者常用的计算目标加速度的方式结合本文中获取的上述相关信息来计算,这里不再赘述。
84.参照图3b,在所述加速监测时间t
_monitor_accel
内,当前车辆的加速度(对应黑色实线部分)大于零。由于在加速监测时间t
_monitor_accel
内,当前车辆提前监测到第一交通参与者未启动,因此,在减速监测时间t
_monitor_decel
内的一段时间,所述当前车辆的加速度小于零(对应图中“第一交通参与者在减速时间t
_monitor_decel
内启动”的虚线小于零的部分),当前车辆减速,但在尚未停车前,信息获取单元110监测到第一交通参与者在减速监测时间t
_monitor_decel
内的某一时刻启动,则控制单元120重新计算当前车辆的加速度(对应图中“第一交通参与者在减速时间内启动”的虚线大于零的部分),以控制当前车辆开始加速行驶。由此可见,在此情况(ii-1)中,当前车辆无需在减速监测时间t
_monitor_decel
内减速至停车,然后再等待起步,而是在停车之前即可再次加速起步,从而缩短起步时间,进而使得当前车辆在情况(ii-1)的整个“停车-起步”过程中的起步响应更快。
85.对于情况(ii-2),如果在所述当前车辆减速至停车之前所述第一交通参与者在所述减速监测时间t
_monitor_decel
内未启动,则控制所述当前车辆停车等待。
86.参照图3b,在所述减速监测时间t
_monitor_decel
内,当前车辆的加速度(对应黑色实线部分)小于零,由于在整个减速监测时间t
_monitor_decel
内,信息获取单元110监测到第一交通参与者未启动,则控制单元120控制当前车辆减速至停车,等待再次启动。
87.如上文描述的本发明的用于车辆启停控制的辅助驾驶系统以及如下面将描述的本发明的用于车辆启停控制的辅助驾驶方法可适用于车辆以自适应巡航控制(acc)状态行驶于需要经常停车-起步的场景。
88.作为本发明第二方面,提供一种车辆,其中,所述车辆包括本发明所述的用于车辆启停控制的辅助驾驶系统。其中,所述车辆可以为具有自适应巡航控制(acc)功能的车辆,例如,自动驾驶车辆。
89.作为本发明第三方面,提供一种用于车辆启停控制的辅助驾驶方法。图2示出根据本发明一实施方案的用于车辆启停控制的辅助驾驶方法200。
90.如图2所示,所述辅助驾驶方法200包括:
91.s210、获取当前车辆、与当前车辆位于同一车道且在当前车辆前方的第一交通参
与者、和与当前车辆位于同一车道且在该第一交通参与者前方的第二交通参与者的行驶相关信息,以及获取所述当前车辆的与启停控制相关的预设参数;
92.s220、在当前车辆停止行进时,基于所述第二交通参与者的行驶相关信息判断所述第二交通参与者是否启动,如果判断所述第二交通参与者启动,则控制所述当前车辆以预设的初始加速度启动,以及在当前车辆以预设的初始加速度启动后,在一监测时间内监测所述第一交通参与者是否也启动,响应于所述第一交通参与者在所述监测时间内是否启动的监测结果,调整所述当前车辆的行驶状态,其中,所述监测时间是根据所述当前车辆、第一交通参与者和第二交通参与者的行驶相关信息以及预设参数中的一个或多个确定的。
93.为简洁起见,关于所述行驶相关信息、所述预设参数以及所述监测时间的具体内容可以参考本文上述关于所述辅助驾驶系统的描述。
94.优选地,所述监测时间t
_monitor
包括加速监测时间t
_monitor_accel
和减速监测时间t
_monitor_decel
。在一个实施方案中,在当前车辆以预设的初始加速度启动后在一监测时间内监测所述第一交通参与者是否也启动,包括:监测在所述加速监测时间t
_monitor_accel
内所述第一交通参与者的速度v
x_wzo
是否大于零;
95.所述响应于所述第一交通参与者在所述监测时间内是否启动的监测结果调整所述当前车辆的行驶状态,包括:
96.响应于在所述加速监测时间t
_monitor_accel
内所述第一交通参与者的速度v
x_wzo
大于零,则至少基于所述当前车辆重新启动预期达到的最大速度p
_v_pre_restart_max
计算第一目标加速度,然后控制所述当前车辆以该第一目标加速度加速至所述最大速度p
_v_pre_restart_max
并保持该最大速度p
_v_pre_restart_max
直至所述当前车辆与所述第一交通参与者之间的实时距离d
x_wzo
接近或等于用于跟随控制的所述当前车辆相对于所述第一交通参与者的第一期望距离d
x_desired_acc
;和/或
97.响应于在所述加速监测时间t
_monitor_accel
内所述第一交通参与者的速度v
x_wzo
不大于零,控制所述当前车辆在减速监测时间t
_monitor_decel
内以目标减速度减速,并且,
98.如果在所述当前车辆减速至停车之前所述第一交通参与者在所述减速监测时间t
_monitor_decel
内启动,则至少基于所述当前车辆重新启动预期达到的最大速度p
_v_pre_restart_max
计算第二目标加速度,然后控制所述当前车辆以该第二目标加速度加速至所述最大速度p
_v_pre_restart_max
并保持该最大速度p
_v_pre_restart_max
直至所述当前车辆与所述第一交通参与者之间的实时距离d
x_wzo
接近或等于用于跟随控制的所述当前车辆相对于所述第一交通参与者的第一期望距离d
x_desired_acc
;
99.如果在所述当前车辆减速至停车之前所述第一交通参与者在所述减速监测时间t
_monitor_decel
内未启动,则控制所述当前车辆停车等待。
100.应理解,本文中前述第一方面关于用于车辆启停控制的辅助驾驶系统所描述的具体特征也可类似地应用于第三方面的用于车辆启停控制的辅助驾驶方法中进行类似扩展。为简化起见,未对其进行详细描述。
101.应理解,本发明的用于车辆启停控制的辅助驾驶系统100的各个单元可全部或部分地通过软件、硬件、固件或其组合来实现。所述各单元各自可以硬件或固件形式内嵌于计算机设备的处理器中或独立于所述处理器,也可以软件形式存储于计算机设备的存储器中以供处理器调用来执行所述各单元的操作。所述各单元各自可以实现为独立的部件或模
块,或者两个或更多个单元可实现为单个部件或模块。
102.本领域普通技术人员应理解,图1中示出的用于车辆启停控制的辅助驾驶系统100的示意图仅仅是与本发明的方案相关的部分结构的示例性说明框图,并不构成对体现本发明的方案的计算机设备、处理器或计算机程序的限定。具体的计算机设备、处理器或计算机程序可以包括比图中所示更多或更少的部件或模块,或者组合或拆分某些部件或模块,或者可具有不同的部件或模块布置。
103.作为本发明第四方面,提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序在被处理器执行时实现本发明第三方面的方法的步骤。在一个实施例中,所述计算机程序被分布在网络耦合的多个计算机设备或处理器上,以使得所述计算机程序由一个或多个计算机设备或处理器以分布式方式存储、访问和执行。单个方法步骤/操作,或者两个或更多个方法步骤/操作,可以由单个计算机设备或处理器或由两个或更多个计算机设备或处理器执行。一个或多个方法步骤/操作可以由一个或多个计算机设备或处理器执行,并且一个或多个其他方法步骤/操作可以由一个或多个其他计算机设备或处理器执行。一个或多个计算机设备或处理器可以执行单个方法步骤/操作,或执行两个或更多个方法步骤/操作。
104.本领域普通技术人员可以理解,本发明的用于车辆启停控制的辅助驾驶方法的全部或部分步骤可以通过计算机程序来指示相关的硬件如计算机设备或处理器完成,所述的计算机程序可存储于非暂时性计算机可读存储介质中,该计算机程序被执行时实现本发明的用于车辆启停控制的辅助驾驶方法的步骤。根据情况,本文中对存储器、存储、数据库或其它介质的任何引用可包括非易失性和/或易失性存储器。非易失性存储器的示例包括只读存储器(rom)、可编程rom(prom)、电可编程rom(eprom)、电可擦除可编程rom(eeprom)、闪存、磁带、软盘、磁光数据存储装置、光学数据存储装置、硬盘、固态盘等。易失性存储器的示例包括随机存取存储器(ram)、外部高速缓冲存储器等。
105.以上描述的各技术特征可以任意地组合。尽管未对这些技术特征的所有可能组合进行描述,但这些技术特征的任何组合都应当被认为由本说明书涵盖,只要这样的组合不存在矛盾。
106.尽管结合实施例对本发明进行了描述,但本领域技术人员应理解,上文的描述和附图仅是示例性而非限制性的,本发明不限于所公开的实施例。在不偏离本发明的精神的情况下,各种改型和变体是可能的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。