一种自走式青饲料收获打捆一体机控制方法与流程
- 国知局
- 2024-07-12 12:57:10
本发明属于青贮机工作控制,具体地说,本发明涉及一种自走式青饲料收获打捆一体机控制方法。
背景技术:
1、我国北方农作物多是一季一熟,因此秋冬季节就会出现饲草料缺乏的现象,特别是鲜青饲草料,传统的畜牧业养殖多数以干料饲喂,即在夏季或秋季将牧草等晒干储备,以便于在冬季、初春等季节使用,这种饲喂方式极大地降低了饲草的营养成分和适口性,随着养殖技术的不断提高,经过研究发现通过青贮加工,可以将新鲜牧草等做成青贮饲料,新鲜、适口,解决了饲草匮乏季节的困扰。
2、青贮饲料是将新鲜的青绿饲料在密闭缺氧的条件下,通过厌氧乳酸菌的发酵作用,抑制各种杂菌的繁殖得到的一种粗饲料,青贮饲料气味酸香、柔软多汁、适口性好、营养丰富,储存占地少且没有火灾问题,利于长期保存是家畜优良饲料来源。
3、青贮饲料的加工是利用青贮机来完成的,从结构形式上分为自走式、悬挂式、牵引式三种,上述各种青贮机在工作时,均需要专门的供料机向青贮机的成型室内添加物料,通过成型室打捆成型,并经过包膜机构进行自动包膜和自动卸捆。
4、现有的自走式青饲料收获打捆一体机,由于机型作业比较复杂,需要完成开机检测、自动送料、自动缠网、自动开关仓、自动循环等功能,并且需要保证收割作业时,优先割台升降等,所以需要开发本电控系统,以实现该车型的自动化作业。
技术实现思路
1、本发明提供一种自走式青饲料收获打捆一体机控制方法,解决了上述背景技术中所提出的问题。
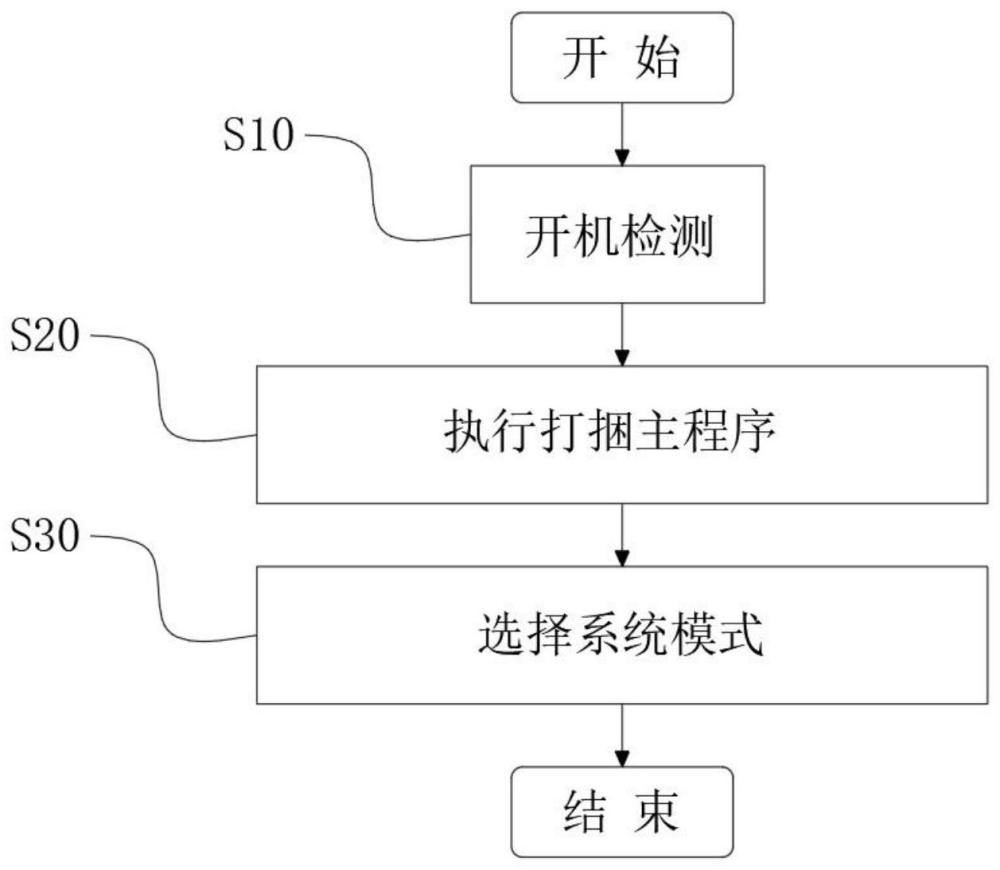
2、为了实现上述目的,本发明采取的技术方案为:一种自走式青饲料收获打捆一体机控制方法,包括以下步骤:
3、步骤s10,开机检测;
4、步骤s20,执行打捆主程序;
5、步骤s30,选择系统模式;
6、所述步骤s20包括以下步骤:
7、步骤s21,供给开始;
8、步骤s22,出网工作;
9、步骤s23,缠网工作。
10、优选的,所述步骤s21包括以下步骤:
11、步骤s211,按下供给开始按钮;
12、步骤s212,确认割台升电磁阀是否打开,若是则返回重复进行判定,若否则进行下一步骤;
13、步骤s213,确认割台降电磁阀是否打开,若是则返回重复进行判定,若否则进行下一步骤;
14、步骤s214,确认全闭信号是否打开,若是则进行下一步骤,若否则关闭马达正转电磁阀,熄灭供给指示灯;
15、步骤s215,确认传动结合信号是否打开,若是则供给马达正转电磁阀打开,供给指示灯点亮,并进行下一步骤,若否则关闭马达正转电磁阀,熄灭供给指示灯。
16、优选的,所述步骤s22包括以下步骤:
17、步骤s221,确认是否收到成型满信号,若否则返回重复进行判定,若是则使供给马达电磁阀停止,控制电机打开,同时延时2秒钟后,供给马达正转电磁阀打开0.7秒,然后进行下一步骤;
18、步骤s222,确认20秒内凸轮开关信号是否打开,若是则使控制电机停止,再进行步骤步骤s23,若否则进行步骤s223;
19、步骤s223,控制电机停止,蜂鸣器0.5赫兹报警,报“检查凸轮开关”故障,报“处理完故障后按手动出网,再按复位”提示;
20、步骤s224,操作人员处理完故障后,按复位按钮,然后取消蜂鸣器0.5赫兹报警,取消显示“检查凸轮开关”,最后返回步骤s222。
21、优选的,所述步骤s23包括以下步骤:
22、步骤s231,确认6秒内是否检测到缠网开关信号,若是则使缠网警示灯点亮,然后计时10秒钟,10秒钟之后,再进行步骤s32,若否则转移至步骤324;
23、步骤s232,确认缠网开关信号是否断开,若是则在延时0.5秒,缠网完成指示灯点亮,再进行步骤s233,若否则重复进行判定;
24、步骤s233,确认定刀开关信号是否断开,若是则转移至步骤s234,若否则进行步骤s30;
25、步骤s234,缠网警示灯关闭,蜂鸣器0.5赫兹报警,报“请检查网状态”故障,报“处理完故障后请按手动出网”提示,然后缠网异常指示灯点亮;
26、步骤s235,操作人员处理完网故障问题,按下复位按钮,取消蜂鸣器0.5赫兹报警,取消显示“请检查网状态”然后熄灭缠网异常灯,再按下手动出网,转回到步骤s22。
27、优选的,所述步骤s10包括以下步骤:
28、步骤s11,系统上电,显示公司标志;
29、步骤s12,确认全闭信号是否打开,若是则进行下一步骤,若否则“请检查成型室是否关闭”故障,报“请检查全闭开关”故障,蜂鸣器0.5赫兹报警,然后通过操作人员手动关闭成型室,再进行下一步骤;
30、步骤s13,取消蜂鸣器0.5赫兹报警,取消“请检查成型室是否关闭”故障显示,取消“请检查全闭开关”故障显示;
31、步骤s14,确认凸轮开关信号是否打开,若是则进行步骤s16,若否则报“等待凸轮开关复位”故障,控制电机打开,然后进行下一步骤;
32、步骤s15,再次确认20s内凸轮开关信号是否打开,若是则控制电机关闭,进行步骤16,若否则控制电机关闭,报“请检查凸轮开关”故障,蜂鸣器0.5赫兹报警,按复位按钮,取消蜂鸣器0.5赫兹报警,然后再次按复位按钮,进行步骤14;
33、步骤s16,取消“等待凸轮开关复位”显示,取消“请检查凸轮开关”显示,然后显示“开机检测完成”,延时1秒钟后,取消显示“开机检测完成”。
34、优选的,所述步骤s30包括以下步骤:
35、步骤s31,确认系统选择模式,若为自动状态则进行步骤s32,若为手动状态则进行步骤s33;
36、步骤s32,自动状态;
37、步骤s33,手动状态;
38、步骤s34,然后延时0.5秒之后,注油泵打开,延时10秒钟之后,注油泵关闭,然后进入打捆主程序下一个循环。
39、优选的,所述步骤s32包括以下步骤:
40、步骤s321,确认割台升电磁阀是否打开,若是则返回重复进行判定,若否则进行下一步骤;
41、步骤s322,确认割台降电磁阀是否打开,若是则返回重复进行判定,若否则执行开仓电磁阀打开,先导阀打开,再进行下一步骤;
42、步骤s323,确认10秒钟内全开信号是否打开,若是则延时0.2秒后,开仓电磁阀关闭,先导阀关闭,再进行步骤s34,若否则开仓电磁阀关闭,先导阀关闭,然后蜂鸣器0.5赫兹报警,报“请检查全开开关”故障,再进行下一步骤;
43、步骤s324,操作人员处理完故障,然后按复位按钮,取消蜂鸣器0.5赫兹报警,报“请切换到手动模式进行手动开关,再转移至步骤步骤s31。
44、优选的,所述步骤s33包括以下步骤:
45、步骤s331,按下开仓按钮,开仓电磁阀打开,先导阀打开;
46、步骤s332,操作人员观察出现全开指示灯后,松开开仓按钮,开仓电磁阀关闭,先导阀关闭,然后缠网完成指示灯熄灭,系统总捆数加一,系统当前捆数加一;
47、步骤s333,按下关仓按钮,关仓电磁阀打开,先导阀打开;
48、步骤s334,操作人员观察出现全闭指示灯后,松开关仓按钮,关仓电磁阀关闭,先导阀关闭,然后转移至步骤s34。
49、采用以上技术方案的有益效果是:
50、一、本发明能够实现该机型的全程自动化作业,并在发生故障时,及时发出报警并自动暂停作业,有效避免生产事故的发生。
51、二、通过全局函数的开发和应用,自走式青饲料收获打捆一体机能够在任何节点进行暂停和重新恢复作业,实现了更高的自动化和智能化水平,这不仅提高了整车的灵活性和可靠性,也进一步降低了故障率和生产成本。
本文地址:https://www.jishuxx.com/zhuanli/20240614/101943.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表