一种基于机器视觉的鱼塘养殖智能投饲系统及方法与流程
- 国知局
- 2024-07-12 12:59:22
本发明属于鱼塘养殖投饲智能装备设计,尤其涉及一种基于机器视觉的鱼塘养殖智能投饲系统及方法。
背景技术:
1、随着经济的发展,全国各地的鱼塘养殖规模不断扩大,但是如今的水产养殖管理模式还是原始、粗放的养殖方式,养殖效率不高且饲料利用率低。现有的水产养殖投饲机主要采用定时投饲的方式,其结构通常包括一个投饲箱,内装有饲料以及一个控制器,用于设定投饲的时间和投饲量;投饲机根据设定的时间,自动释放饲料到鱼塘中,以供鱼群食用。但这种传统的定时投饲机往往只能按照预设的时间进行投饲,无法根据实际情况进行调整,导致投饲的时间不准确,可能导致鱼群未能在最佳时机得到饲料;而且定时投饲方式无法根据鱼塘中鱼群的实际情况进行调整,可能导致投喂过量或者不足的情况,造成饲料的浪费或者鱼群营养不良,进而影响养殖效益。因此,本发明开发了一种基于机器视觉的鱼塘养殖智能投饲装置,能够根据鱼塘进食鱼群数量进行精准智能投饲,有效提高饲料利用率。
技术实现思路
1、针对现有技术中存在的不足,本发明提供了一种基于机器视觉的鱼塘养殖智能投饲系统及方法,实现了精准智能投饲,提升了鱼塘养殖智能化水平,提高了鱼塘饲料利用率,有效提高鱼塘养殖的经济效益。
2、本发明通过以下技术手段实现上述技术目的。
3、一种利用基于机器视觉的鱼塘养殖智能投饲系统的投饲方法,基于机器视觉的鱼塘养殖智能投饲系统包括投饲机、视觉系统、控制系统;投饲机包括料仓,料仓下方饲料出口处设置有饲料托板,饲料托板下方设置有分料斗,分料斗下方设置有抛料盘,抛料盘与抛料电机输出轴;下料电机安装于下料电机座上,下料电机输出轴通过偏心连杆与饲料托板相连,丝杠通过连杆与下料电机座相连;
4、投饲方法包括如下过程:
5、步骤1:开启投饲机,下料电机转动,偏心连杆带动饲料托盘抖动,使饲料从料仓经饲料托板滑落至分料斗,饲料落入抛料盘后,抛料电机驱动抛料盘转动,抛洒饲料;同时视觉系统开始拍照,每间隔一段时间拍照一次,并将图像发送至控制系统的工控机中的图像处理模块;
6、步骤2:图像处理模块接收图像并对所获取的图像进行图像处理,获取多个鱼塘进食鱼群数量类别,然后再进一步与控制系统的数据库内鱼群数量数据进行对比,从而判别出鱼塘进食鱼群数量,并对比数据库内投饲量数据以实现投饲量的判断;
7、步骤3:控制系统基于arduino mega2560主控板,根据投饲量与下料电机和抛料电机转速对应关系,发送信号至下料电器驱动器和抛料电机驱动器,控制下料电机和抛料电机的转速,进行落料流量控制、饲料抛幅控制,进而实现精准投饲。
8、进一步地,所述步骤2中,图像处理的具体过程如下:
9、步骤2.1:图像处理模块首先对鱼塘进食鱼群数量图像进行灰度化处理、滤波处理;
10、步骤2.2:图像处理模块对步骤2.1处理后的图像进行特征提取,采用canny边缘检测方法提取鱼塘进食鱼群图像的边缘特征,并构建边缘特征向量v1;采用灰度共生矩阵法提取鱼塘进食鱼群图像的纹理特征中的能量、惯性矩、熵和相关性,构建纹理特征向量v2;
11、步骤2.3:图像处理模块通过改进的人工蜂群-支持向量机算法实现鱼塘进食鱼群数量分类识别判断:
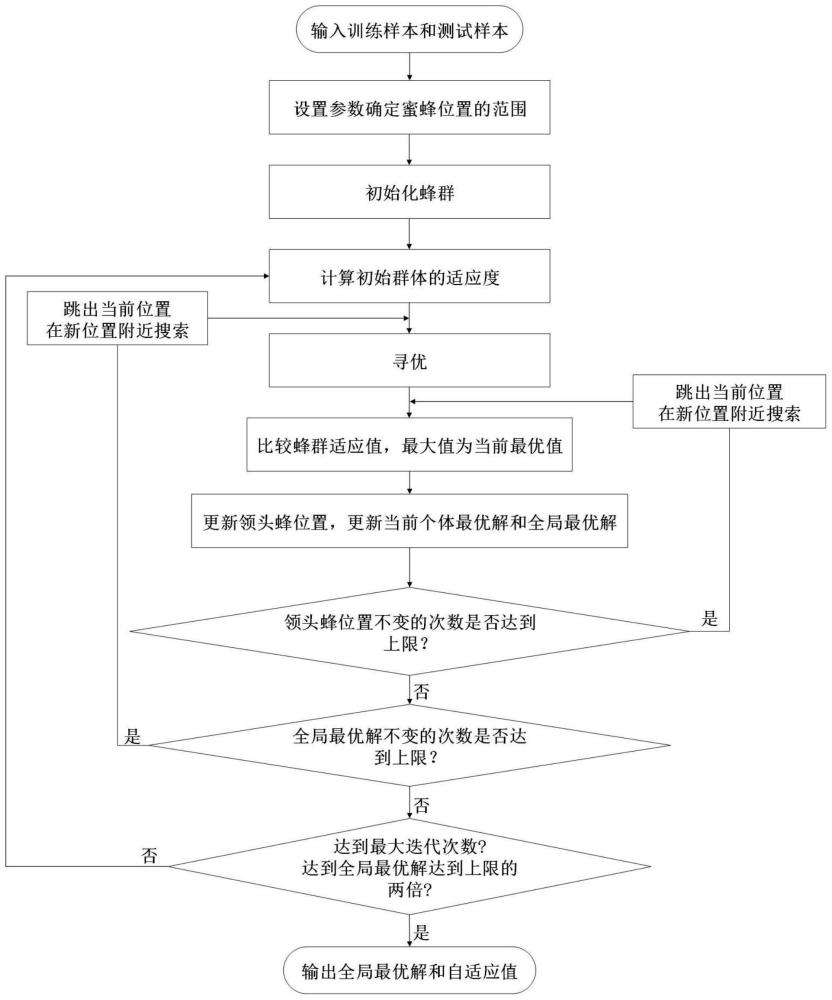
12、步骤2.3.1:构建svm模型,对svm的输入数据进行归一化处理,初始化并提取svm惩罚因子c和核函数参数σ:将组合边缘特征向量v1和纹理特征向量v2作为svm的输入特征向量v,v=[v1,v2],设置领头蜂位置不变的次数上限为l1,设置全局最优解连续不变的上限为l2,设置最大迭代次数为l3,设置惩罚因子c的取值范围为[cmin、cmax]、核函数参数σ取值范围为[σmin、σmax];
13、步骤2.3.2:采用改进人工蜂群算法优化参数c和σ,然后赋值给svm,即初始化人工蜂群,计算初始群体的适应度值,选择高斯径向基核函数作为支持向量机的核函数,每个人工群体的适应度值即为支持向量机的分类精度,比较适应度值的大小,最大值即为当前人工蜂群最优值。
14、进一步地,所述步骤2.3.2中,采用改进人工蜂群算法优化参数c和σ的具体过程如下:
15、首先设置蜜源初始化公式为:
16、xi,d=ld+rand(0,1)(ud-ld),i∈[1,n]
17、其中,n为蜂群的数量;i为蜜源;xi,d为原始蜜源;d为蜜源的维数,设为2,表示参数c和σ;ud和ld分别为预设的蜂蜜源最大值和最小值;
18、评估初始蜜源和新蜜源的适应度,适应度函数fit为:
19、
20、其中,fi为解的目标函数值,作为svm的分类精度;
21、每次搜索后,侦察蜂将成为领头蜂,招募跟随蜂,并分享蜜源信息,包括对好蜜源的正面反馈和对坏蜜源的负面反馈,每个跟随蜂通过使用轮盘赌选择瞄准一个蜜源:
22、
23、其中,pi为选择概率;sn为领头蜂的个数;
24、在跟随蜂搜索阶段,跟随蜂在选定的蜜源附近进行随机搜索,对蜜源更新公式进行优化,于每次信息搜寻时,将之前最优适应度值对应的蜜源位置加入下次搜索中,当迭代次数超过三次时,新的蜜源更新公式为:
25、vi,d=xi,d+rand(-1,1)(xbest1-xk,d)+rand(-1,1)(xbest2-xk,d)
26、其中,vi,d为新蜜源;xk,d为通过使用随机选择在所有蜜源中xk,d的不同相邻蜜源;xbest1、xbest2分别为前两次最优适应度值对应的蜜源位置;
27、步骤2.3.3:更新领头蜂的位置,更新当前个体最优解和全局最优解;
28、步骤2.3.4:判断当前是否满足迭代终止条件,若领头蜂的位置没有连续变化l1次,则会变成侦察蜂,随机初始化自己的位置并搜索;若全局最优解不连续变化l2次,则劣质领头蜂随机初始化自己的位置并搜索;当全局最优解不连续变化2l2次或达到最大迭代次数l3时,输出该点的适应度值和全局最优解,将满足最优的值赋值给svm的c和σ,训练赋值后的svm。
29、本发明具有如下有益效果:
30、本发明采用机器视觉的技术手段,通过对鱼塘进食鱼群状况进行拍照,进而分析得出鱼群进食数量,并实时控制投饲机投饲量,实现精准智能投饲,提升了鱼塘养殖智能化水平,提高了鱼塘饲料利用率,有效提高鱼塘养殖的经济效益。
技术特征:1.一种利用基于机器视觉的鱼塘养殖智能投饲系统的投饲方法,其特征在于,基于机器视觉的鱼塘养殖智能投饲系统包括投饲机、视觉系统、控制系统;投饲机包括料仓(1),料仓(1)下方饲料出口处设置有饲料托板(2),饲料托板(2)下方设置有分料斗(7),分料斗(7)下方设置有抛料盘(4),抛料盘(4)与抛料电机(5)输出轴;下料电机(3)安装于下料电机座(9)上,下料电机(3)输出轴通过偏心连杆(8)与饲料托板(2)相连,丝杠(6)通过连杆与下料电机座(9)相连;
2.根据权利要求1所述的投饲方法,其特征在于,所述步骤2中,图像处理的具体过程如下:
3.根据权利要求2所述的投饲方法,其特征在于,所述步骤2.3.2中,采用改进人工蜂群算法优化参数c和σ的具体过程如下:
技术总结本发明提供一种基于机器视觉的鱼塘养殖智能投饲系统及方法,属于鱼塘养殖投饲智能装备设计领域,投饲系包括投饲机、视觉系统、控制系统,视觉系统采集鱼群图像数据,控制系统基于改进的人工蜂群‑支持向量机算法对图像数据进行分析处理,对鱼塘进食鱼群数量进行判断,并与数据库内鱼群数量数据进行对比,从而对鱼塘进食鱼群数量进行准确判断,并对比数据库内投饲量数据以实现投饲量的判断,最后根据判断结果下发指令至投饲机,通过控制下料电机和抛料电机转速,实现落料流量可控、抛洒装置抛幅可调,从而实现智能化精准投饲,提升鱼塘养殖智能化水平,提高鱼塘饲料利用率,提高鱼塘养殖的经济效益。技术研发人员:朱虹,沈启扬,孙龙霞,葛迅一,李健,徐斌,胡双燕,钱士程受保护的技术使用者:江苏省农机具开发应用中心技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240614/102248.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表