一种高架栽培草莓的连续式采摘机器人系统及其作业方法
- 国知局
- 2024-07-12 13:03:40
本发明涉及自动化机器人的,尤其是指一种高架栽培草莓的连续式采摘机器人系统及其作业方法。
背景技术:
1、草莓作为一种高效益经济作物,且因其具有调节免疫功能的优点而得到种植户和消费者的喜爱,得到广泛种植。为方便生产、提高作业效率,同时提高空间利用率与产量,设施农业中草莓广泛采用高架栽培的形式。目前草莓采摘仍以人工为主,费时费力,生产效率低,不能适应草莓的规模化生产。随着自动化技术和机器人技术的发展以及人们对自动化装备的需求,相继出现一些草莓采摘机器人以代替人工作业,但普遍是间歇式作业的方式,存在采摘效果差和采摘效率低的问题。连续式动态草莓自动化采摘不仅能够提高作业质量和效率,降低劳动力和生产成本,还能增加草莓产业经济效益。
2、发明专利201711130650.8提出了一种基于机器视觉的高架草莓无损采摘装置及其实现方法,通过视觉识别机构拍照确定草莓位置,末端执行机构从草莓正下方向上升起的过程中捕捉并切割草莓,具有新颖性但是缺点是需要先拍照识别再进行采摘作业,影响作业效率。
3、发明专利202210311178.2提出了一种基于双目视觉的草莓采摘方法、机器人系统,通过采集图像识别草莓,并利用草莓的质心以及茎来确定采摘点位置,能够准确获取最有可能的茎,实现低损伤采摘,但是现场进行图像采集和处理需要时间较长,作业效率较低。
4、发明专利202210500243.6提出了一种适用于多层高架种植农艺的多工况温室草莓精准采摘机器人及采摘方法,利用五连杆机械臂在平面内带动末端执行机构自由移动,通过图像识别定位模块对草莓进行识别定位,在高度调节装置的配合下,能够使末端执行机构在不同层高的高架上对成熟草莓进行无损采摘, 该发明定位精度高同时实现分级收集功能,但是作业过程和步骤较为复杂。
5、有鉴于此,为降低采摘损伤、提高采摘效率及降低人工劳动强度,亟需设计一种适用于高架栽培草莓场景的、高效且可靠的连续式草莓采摘机器人。
技术实现思路
1、本发明目的在于为解决现有技术中的不足,提供了一种高架栽培草莓的连续式采摘机器人系统及其作业方法,实时构建草莓种植环境场景模型,获取目标坐标位置和机器人坐标,并规划采摘顺序和运动路径,联动轮式移动底盘与采摘机械臂协同作业,实现自动化作业,在降低劳动强度的同时,能够有效减少采摘损伤和提高采摘效率。
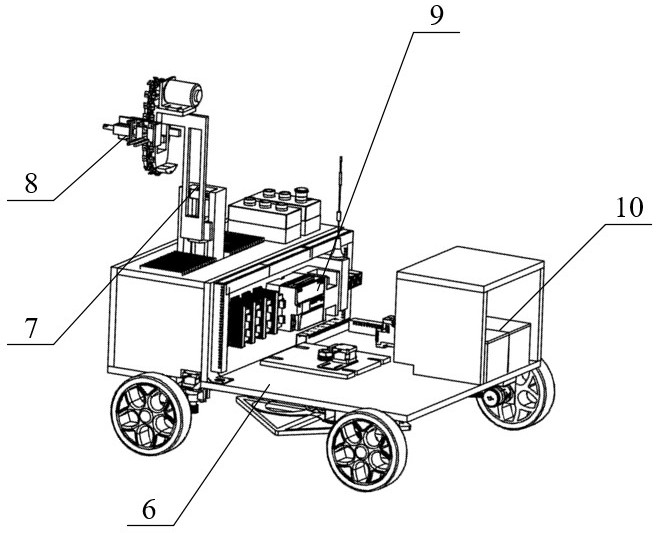
2、为实现上述目的,本发明所提供的技术方案为:一种高架栽培草莓的连续式采摘机器人系统,包括采摘机器人以及与所述采摘机器人通讯连接的控制终端,所述采摘机器人包括轮式移动底盘、安装在轮式移动底盘上的采摘机械臂和控制柜、安装在机械臂上通过旋转运动进行连贯采摘的末端执行器、用于驱动机器人作业的动力电池组、固定安装在温室中的环境信息感知系统以及布置在控制柜中的运算控制系统,其特征在于:采摘机械臂包括横向丝杠、纵向丝杠、末端运动轨道、单边折弯链条、驱动电机和连接板,所述纵向丝杠竖直安装在横向丝杠上,两者配合完成末端执行器的横向和纵向移动,驱动电机和末端运动轨道通过连接板与纵向丝杠固定安装,分别用来驱动单边折弯链条运动和约束单边折弯链条的运动轨迹,单边折弯链条用来安装末端执行器;末端执行器包括固定架、连接件、电磁铁、运动手指和固定手指,所述连接件、电磁铁、运动手指和固定手指通过固定架进行定位和安装,电磁铁带动运动手指往返移动,运动手指和固定手指配合完成草莓的夹持采摘和松开放置;环境信息感知系统包括三维激光雷达传感器、监控摄像头、编码器、拉绳传感器以及光电开关传感器,所述三维激光雷达传感器和监控摄像头通过支架安装在温室顶部位置,两者配合实时采集草莓生长的周围环境信息以及采摘机器人位姿信息,编码器有多个分别安装在采摘机械臂和轮式移动底盘处,用于感知采摘机械臂和轮式移动底盘的状态,拉绳传感器有两个分别安装在横向丝杠和纵向丝杠处,用于感知横向丝杠和纵向丝杠的位移状态,光电传感器有三个安装在末端运动轨道上,分别用于提供末端执行器采摘、卸果和复位的信号;所述运算控制系统分别于环境信息感知系统和电气系统通讯连接,能够根据环境信息感知系统实时采集的草莓生长状态、坐标位置和采摘机器人自身状态信息精准控制底盘的移动及机械臂和末端执行器的运动。
3、进一步,所述运算控制系统集成有工控机、plc、边缘计算网关、供电电源与配电系统;所述plc设置有传感器数据采集模组,所述传感器数据采集模组与环境信息感知系统通讯连接,负责采集环境信息感知系统的信息;所述工控机与传感器数据采集模组通讯连接,且其设置有建图与定位模组和运动规划和动作控制模组,所述建图与定位模组用于实现草莓生长状态建模和位置坐标获取,并且获取采摘机器人自身状态信息,所述运动规划和动作控制模组分别与采摘机械臂和轮式移动底盘通讯连接,用于对采摘机械臂和轮式移动底盘进行动作规划和动作控制;所述边缘计算网关分别与plc和工控机通讯连接,用于实现数据和控制信息的无线传输。
4、进一步,所述末端执行器在链轮链条带动下和末端运动轨道约束下在固定轨迹内进行旋转运动;采用旋转的方式从上至下运动到达采摘位置,并以倾斜的角度完成草莓采摘,能够有效减少周围草莓和果梗对采摘过程的影响;旋转往复式的运动方式减少了复位过程,能够提高采摘效率。
5、进一步,所述末端执行器采用夹持剪切方式进行草莓采摘,固定手指和运动手指均采用长×宽×高为5 mm×5 mm×50 mm的立方体,固定手指和运动手指之间的最大开度为10 mm,在满足采摘需求的同时增加通过性;使用直流推拉电磁铁,实现运动手指的往复移动。
6、一种上述的高架栽培草莓的连续式采摘机器人的作业方法,包括以下步骤:
7、s1、将草莓采摘机器人放置于温室高架草莓种植环境中,并在控制终端输入待采摘草莓的成熟度信息,通过无线传输方式将该信息传输至采摘机器人系统的运算控制系统中;
8、s2、三维激光雷达传感器采集温室高架草莓种植环境点云信息,草莓采摘机器人的运算控制系统实时构建草莓生长环境模型,获取草莓果梗遮挡情况和待采摘草莓的位置坐标,根据最短路径原理和果梗先外后内原则规划采摘顺序;监控摄像头实时获取温室环境图像,草莓采摘机器人的运算控制系统实时计算其自身位置坐标信息;
9、s3、草莓采摘机器人的运算控制系统根据其自身位置坐标信息和第一个待采摘草莓坐标信息,进行轮式移动底盘和采摘机械臂的动作控制,在草莓采摘机器人行走过程中完成采摘机械臂的移动,当到达目标位置时立即完成采摘动作,然后草莓采摘机器人开始向第二个待采摘草莓移动,在移动过程中完成草莓的放置和采摘机械臂的动作控制;
10、s4、草莓采摘机器人重复s3的动作,直至完成所有草莓采摘,在整个采摘过程中轮式移动底盘运动不停止,在轮式移动底盘行走过程中完成采摘机械臂的移动,实现连续式采摘作业。
11、进一步,在步骤s2中,具体为:
12、采摘机器人系统的三维激光雷达传感器和监控摄像头共同配合实时采集草莓生长的周围环境信息以及采摘机器人位置位姿信息,完成温室高架草莓种植环境的三维重建,获取待采摘草莓和采摘机器人的位置坐标信息,并规划草莓采摘顺序和采摘机器人的移动路径。
13、进一步,在步骤s3中,具体为:
14、草莓采摘机器人在向待采摘草莓行走过程中进行采摘机械臂的运动控制,实现采摘机械臂位姿调整,在到达目标位置后立即执行采摘动作,草莓采摘机器人无需在停止运动后再进行采摘作业,可以实现连续式采摘,提高作业效率。
15、本发明与现有技术相比,具有如下优点与有益效果:
16、1、本发明中通过实时构建草莓种植环境场景模型,根据目标位置和机器人定位信息,实时规划采摘顺序和机器人运动路径,联动轮式移动底盘与采摘机械臂协同作业,实现自动化作业,有效提高机器人运动和作业的稳定性。
17、2、本发明在草莓采摘机器人在向待采摘草莓行走过程中进行采摘机械臂的运动控制,实现采摘机械臂位姿调整,在到达目标位置后立即执行采摘动作,草莓采摘机器人无需在停止运动后再进行采摘作业,可以实现连续式采摘,提高作业效率。
18、3、本发明的末端执行器在在固定轨迹内进行旋转运动,通过旋转的方式从上至下运动到达采摘位置,并以倾斜的角度完成草莓采摘,能够有效减少周围草莓和果梗对采摘过程的影响,旋转往复式的运动方式减少了复位过程,能够提高采摘效率。
本文地址:https://www.jishuxx.com/zhuanli/20240614/102542.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表