大蒜联合收获机用地膜、杂草割锄组件及大蒜收获方法与流程
- 国知局
- 2024-07-12 13:04:56
本发明涉及大蒜收获,具体地说是一种大蒜联合收获机用地膜、杂草割锄组件及大蒜收获方法。
背景技术:
1、大蒜作为一种经济农作物在我国有着广泛的种植面积。目前,对于大蒜的收获主要有两种方式,一种方式是采用纯人工收获,人工收获大蒜虽然蒜头损伤率低,但是劳动强度高,效率低,对于大面积的大蒜种植户来讲,其人工成本高,不利于大蒜集中快速上市;另一种方式为机械收获,现有的市面上的一些大蒜收获机,在收割大蒜作业时,其薄膜清理效果并不好,常出现薄膜缠绕在收割上来的大蒜植株上,导致后续的大蒜植株切割处理时,需要将薄膜去掉,增加了大蒜后续处理工序,同时,现有的大蒜收获机械设备上的薄膜处理组件与大蒜根部切割组件为两个独立的机构,这样导致现有的大蒜收获机的结构较为复杂。
技术实现思路
1、本发明的目的在于提供一种大蒜联合收获机用地膜、杂草割锄组件及大蒜收获方法,利用切割片与活动竖板的相对运动,则实现对薄膜的有效切割,杂草及被切割开的薄膜在切割片两侧后拨轮的高速转动下会不断被向后推送,从而能够有效实现薄膜、杂草与大蒜植株的分离,继而提高大蒜植株收获质量,同时,活动竖板在薄膜切割及大蒜根部切割时均起作用,继而能够简化大蒜收获机的结构。
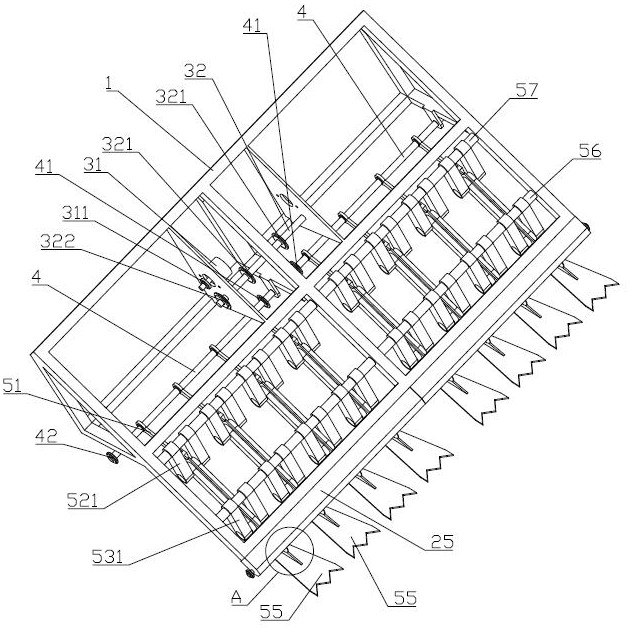
2、本发明解决其技术问题所采取的技术方案是:一种大蒜联合收获机用地膜、杂草割锄组件,包括支撑架、薄膜杂草清理组件、驱动组件,两组所述薄膜杂草清理组件左右对称设置在所述支撑架的前部,每一组所述薄膜杂草清理组件均包括支撑转轴、切割片、后拨轮、活动竖板,所述支撑转轴沿着左右方向转动设置在所述支撑架前部,在所述支撑转轴上沿其轴线方向等间距设置有若干所述切割片,在每一个所述切割片的一侧均设置一所述活动竖板,所述活动竖板相对于对应的所述切割片能够进行往复斜向上运动,在相邻的两个切割片之间设置有至少一个所述后拨轮,所述驱动组件能够为所述活动竖板的往复斜向上运动及支撑转轴的转动提供动力。
3、优选地,所述切割片的侧壁与相邻的所述活动竖板的对应侧壁相贴合。
4、进一步地,在所述支撑转轴上设置有四个切割片,在相邻的两个所述切割片之间设置有一个所述后拨轮,在每一个所述支撑转轴的上方均设置一防护罩。
5、进一步地,所述后拨轮包括若干沿着支撑转轴的圆周方向等间距分布的弧形拨爪。
6、进一步地,在所述活动竖板的前部设置一前低后高的斜面。
7、进一步地,所述驱动组件包括动力机构、第一驱动轴、活动竖板驱动连杆机构,每一组所述活动竖板驱动连杆机构用于驱动对应的一个所述活动竖板进行斜向上往复运动,所述第一驱动轴用于带动对应的四组所述活动竖板驱动连杆机构进行往复运动同时带动对应的一个所述支撑转动进行转动,每一组所述活动竖板驱动连杆机构均包括驱动连杆、后摆臂、前摆臂、偏心轴承,所述前摆臂和后摆臂的下端均与对应的所述活动竖板铰接连接,所述前摆臂和后摆臂前后分布且前摆臂位于对应的支撑转轴后方,所述前摆臂和后摆臂的上部均铰接设置在所述支撑架上,所述前摆臂上下两端的两个铰接转动轴线与所述后摆臂上下两端的两个铰接转动轴线对分布在平行四边形的四个顶点上,每一个所述驱动连杆的前端与对应的所述活动竖板的后部铰接连接,在每一个所述驱动连杆的后端均设置一所述偏心轴承,且驱动连杆的后端与对应的偏心轴承的外圈固定连接,四个所述偏心轴承的偏心套采用键传动方式套置在对应的所述第一驱动轴上,且四个偏心套的最高点沿着所述第一驱动轴的圆周方向依次间隔90°分布;所述动力机构用于同步驱动两个所述第一驱动轴转动。
8、进一步地,在每一个所述活动竖板的前端底部均固定设置一铲刀。
9、进一步地,所述动力机构包括动力源、同步传动轴,在两个所述第一驱动轴相对的端部均固定设置一第一链轮,所述同步传动轴转动设置在所述支撑架上,在所述同步传动轴上设置有两个分别与两个所述第一链轮一一对应的第二链轮,所述第一链轮和第二链轮的结构相同,所述动力源设置在所述支撑架上,且在动力源的输出轴上设置一第三链轮,在所述同步传动轴上设置一与所述第三链轮对应的第四链轮,在每一个所述第一驱动轴的外端均设置一第五链轮,在每一个所述支撑转轴的外端均设置一与所述第五链轮对应的第六链轮,所述第三链轮与第四链轮采用链传动方式实现传动,所述第一链轮与对应的第二链轮采用链传动方式实现传动,所述第五链轮与第六链轮采用链传动方式实现传动。
10、进一步地,所述前摆臂包括两个前连接板,两个所述前连接板左右对称分布在所述铲刀臂两侧,所述前连接板的上部与一前转动管固定连接,所述前转动管转动套置在所述支撑架上设置一前支撑轴上;所述后摆臂包括两个后连接板,两个所述后连接板左右对称分布在所述铲刀臂两侧,所述后连接板的上部与一后转动管固定连接,所述后转动管转动套置在所述支撑架上设置一后支撑轴上。
11、一种大蒜收获方法,包括上述内容所述的大蒜联合收获机用地膜、杂草割锄组件,该大蒜收获方法还包括所述切割片和铲刀如下使用方法:在通过支撑架调整所有铲刀的所需铲蒜深度时,使得所有所述铲刀呈前低后高状态,调整好铲刀位置后,随着支撑架的前行,铲刀整体位于土壤中,切割片和后拨轮与地面相靠近,活动竖板的下部一部分位于土壤中,在第一驱动轴驱动转动时,铲刀进行斜向上的往复运动过程中所述铲刀始终处于土壤中,切割片高速转动进行薄膜的切割处理,后拨轮高速转动将杂草不断向后拨动,所述活动竖板的斜面不断将薄膜向切割片方向顶送。
12、本发明的有益效果是:本发明结构简单,加工制造便利;在支撑架不断前行过程中,通过活动竖板的斜向上往复运动则会带动铲刀进行斜向上往复运动,从而利用铲刀实现大蒜植株根部的切割,同时,在活动竖板斜向上不断往复运动的过程中,斜面不断将薄膜向切割片顶推,在斜面边缘与切割片边缘之间形成一对薄膜有剪切作用的剪切力,继而实现切割片和斜面对薄膜的剪切式切割,在切割片剪切薄膜的同时,切割片还保持高速转动,从而便于将被顶推向切割片边缘的薄膜顺利切割开;切割片与斜面通过剪切及切割相结合的方式实现对薄膜的切割作用,则可确保薄膜被有效切开,因切割片与其前方的大蒜相对,从而使得薄膜的切开处与大蒜植株较为靠近,这样在切割片两侧的拔草轮的高速转动下,则可有效实现薄膜与大蒜植株的脱离同时实现薄膜被不断向后推送,继而在大蒜被缓慢从土壤中提起时,有效解决了薄膜缠绕大蒜植株的问题,进一步地,后拨轮的高速转动能够同步将地面上的杂草不断向下向后拨送,从而在大蒜植株被提升时,有效接解决了杂草缠绕大蒜的问题,继而可提高大蒜植株收获质量;在实际应用中,通过合理的设置偏心轴承的偏心套的偏心距,能够使得铲刀在往复运动过程中,始终处于土壤中,从而不会将土壤翻起,土壤不会被翻起则使得薄膜不会被翻起的土壤覆盖,继而便于后拨轮顺利实现杂草及被切割后的薄膜的向后推送清理。
技术特征:1.一种大蒜联合收获机用地膜、杂草割锄组件,其特征是,包括支撑架、薄膜杂草清理组件、驱动组件,两组所述薄膜杂草清理组件左右对称设置在所述支撑架的前部,每一组所述薄膜杂草清理组件均包括支撑转轴、切割片、后拨轮、活动竖板,所述支撑转轴沿着左右方向转动设置在所述支撑架前部,在所述支撑转轴上沿其轴线方向等间距设置有若干所述切割片,在每一个所述切割片的一侧均设置一所述活动竖板,所述活动竖板相对于对应的所述切割片能够进行往复斜向上运动,在相邻的两个切割片之间设置有至少一个所述后拨轮,所述驱动组件能够为所述活动竖板的往复斜向上运动及支撑转轴的转动提供动力。
2.根据权利要求1所述的大蒜联合收获机用地膜、杂草割锄组件,其特征是,所述切割片的侧壁与相邻的所述活动竖板的对应侧壁相贴合。
3.根据权利要求2所述的大蒜联合收获机用地膜、杂草割锄组件,其特征是,在所述支撑转轴上设置有四个切割片,在相邻的两个所述切割片之间设置有一个所述后拨轮,在每一个所述支撑转轴的上方均设置一防护罩。
4.根据权利要求2所述的大蒜联合收获机用地膜、杂草割锄组件,其特征是,所述后拨轮包括若干沿着支撑转轴的圆周方向等间距分布的弧形拨爪。
5.根据权利要求3所述的大蒜联合收获机用地膜、杂草割锄组件,其特征是,在所述活动竖板的前部设置一前低后高的斜面。
6.根据权利要求5所述的大蒜联合收获机用地膜、杂草割锄组件,其特征是,所述驱动组件包括动力机构、第一驱动轴、活动竖板驱动连杆机构,每一组所述活动竖板驱动连杆机构用于驱动对应的一个所述活动竖板进行斜向上往复运动,所述第一驱动轴用于带动对应的四组所述活动竖板驱动连杆机构进行往复运动同时带动对应的一个所述支撑转动进行转动,每一组所述活动竖板驱动连杆机构均包括驱动连杆、后摆臂、前摆臂、偏心轴承,所述前摆臂和后摆臂的下端均与对应的所述活动竖板铰接连接,所述前摆臂和后摆臂前后分布且前摆臂位于对应的支撑转轴后方,所述前摆臂和后摆臂的上部均铰接设置在所述支撑架上,所述前摆臂上下两端的两个铰接转动轴线与所述后摆臂上下两端的两个铰接转动轴线对分布在平行四边形的四个顶点上,每一个所述驱动连杆的前端与对应的所述活动竖板的后部铰接连接,在每一个所述驱动连杆的后端均设置一所述偏心轴承,且驱动连杆的后端与对应的偏心轴承的外圈固定连接,四个所述偏心轴承的偏心套采用键传动方式套置在对应的所述第一驱动轴上,且四个偏心套的最高点沿着所述第一驱动轴的圆周方向依次间隔90°分布;所述动力机构用于同步驱动两个所述第一驱动轴转动。
7.根据权利要求6所述的大蒜联合收获机用地膜、杂草割锄组件,其特征是,在每一个所述活动竖板的前端底部均固定设置一铲刀。
8.根据权利要求7所述的大蒜联合收获机用地膜、杂草割锄组件,其特征是,所述动力机构包括动力源、同步传动轴,在两个所述第一驱动轴相对的端部均固定设置一第一链轮,所述同步传动轴转动设置在所述支撑架上,在所述同步传动轴上设置有两个分别与两个所述第一链轮一一对应的第二链轮,所述第一链轮和第二链轮的结构相同,所述动力源设置在所述支撑架上,且在动力源的输出轴上设置一第三链轮,在所述同步传动轴上设置一与所述第三链轮对应的第四链轮,在每一个所述第一驱动轴的外端均设置一第五链轮,在每一个所述支撑转轴的外端均设置一与所述第五链轮对应的第六链轮,所述第三链轮与第四链轮采用链传动方式实现传动,所述第一链轮与对应的第二链轮采用链传动方式实现传动,所述第五链轮与第六链轮采用链传动方式实现传动。
9.根据权利要求8所述的大蒜联合收获机用地膜、杂草割锄组件,其特征是,所述前摆臂包括两个前连接板,两个所述前连接板左右对称分布在所述铲刀臂两侧,所述前连接板的上部与一前转动管固定连接,所述前转动管转动套置在所述支撑架上设置一前支撑轴上;所述后摆臂包括两个后连接板,两个所述后连接板左右对称分布在所述铲刀臂两侧,所述后连接板的上部与一后转动管固定连接,所述后转动管转动套置在所述支撑架上设置一后支撑轴上。
10.一种大蒜收获方法,其特征是,包括依据权利要求9所述的大蒜联合收获机用地膜、杂草割锄组件,该大蒜收获方法还包括所述切割片和铲刀如下使用方法:在通过支撑架调整所有铲刀的所需铲蒜深度时,使得所有所述铲刀呈前低后高状态,调整好铲刀位置后,随着支撑架的前行,铲刀整体位于土壤中,切割片和后拨轮与地面相靠近,活动竖板的下部一部分位于土壤中,在第一驱动轴驱动转动时,铲刀进行斜向上的往复运动过程中所述铲刀始终处于土壤中,切割片高速转动进行薄膜的切割处理,后拨轮高速转动将杂草不断向后拨动,所述活动竖板的斜面不断将薄膜向切割片方向顶送。
技术总结本发明给出了一种大蒜联合收获机用地膜、杂草割锄组件及大蒜收获方法,包括支撑架、薄膜杂草清理组件、驱动组件,两组薄膜杂草清理组件左右对称设置在支撑架的前部,每一组薄膜杂草清理组件均包括支撑转轴、切割片、后拨轮、活动竖板,支撑转轴沿着左右方向转动设置在支撑架前部,在支撑转轴上沿其轴线方向等间距设置有若干切割片,在每一个切割片的一侧均设置一活动竖板,活动竖板相对于对应的切割片能够进行往复斜向上运动,在相邻的两个切割片之间设置有至少一个后拨轮,驱动组件能够为活动竖板的往复斜向上运动及支撑转轴的转动提供动力。利用本发明能够有效实现薄膜及杂草的清理,继而便于提高大蒜植株的收获质量。技术研发人员:左海龙,李鲲鹏,胡春侠,姚杰,王保平,李绍云,徐嘉冲,赵杰,黄杰,侯培营,杨贵胜,李凤侠,危立亮,徐士华受保护的技术使用者:临沂华翔鑫农业机械制造有限公司技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240614/102679.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。