一种种植机器人的制作方法
- 国知局
- 2024-07-12 13:16:12
本发明涉及植树机器人,具体涉及一种种植机器人。
背景技术:
1、种植装置也称为植树机或植树机器人,是一种能够在荒漠、平原、丘陵、沙丘、黏土地等不同土壤中,进行钻孔和种植的装置。尤其是在沙漠中,由于条件恶劣,面积大,种植困难,而普通的人工造林的成本高,种植机器人成为重要的研究方向。但是由于沙漠、黏土、沙丘等的土质或沙质较软,普通螺旋钻头在钻孔的过程中,造成泥土或沙土飞溅,严重影响到覆土作业。
2、由于沙土和软质泥土较软,覆土时,仅将浮土填入树坑中,或简单压实的情况下,树坑外周仍然较软,无法将树苗稳固在树坑内,导致种植后树苗出现倾倒现象,种植的存活率下降。因此,需要设计一种新型可适应于沙土和软性土质的种植机器人。
技术实现思路
1、针对现有技术中存在的上述技术问题,本发明提供一种可适应于沙土和软性土质的种植机器人,通过倾斜设置的覆土组件对树坑进行压实。
2、本发明公开了一种种植机器人,包括安装架和覆土组件,所述安装架两侧分别设置有外支架,所述覆土组件包括第四直线驱动器和覆土盘,所述第四直线驱动器倾斜设置在所述安装架一侧的外支架上,所述第四直线驱动器的驱动端与所述覆土盘连接。
3、优选的,所述第四直线驱动器的输出端向安装架的下侧倾斜;
4、所述第四直线驱动器的驱动端通过第二连接件与覆土盘连接,
5、所述覆土盘下侧设置有弧形的刮板。
6、优选的,所述覆土组件还包括设置在所述外支架上的外套管,所述外套管内侧设置有内套管,所述第四直线驱动器安装在内套管内。
7、优选的,所述安装架上设置有种植组件,
8、两个所述第四直线驱动器的输出端向种植组件的下侧延伸;
9、所述覆土盘的上端面水平设置。
10、优选的,所述种植组件包括内支架、钻头和落苗管,所述落苗管安装在所述内支架上,所述钻头安装在所述内支架下侧,
11、所述冲击件的上侧设置有与所述落苗管相配合的凹槽,
12、所述钻头包括两个可开合的冲击件。
13、优选的,所述种植组件还包括导向板和第二直线驱动器,
14、所述第二直线驱动器设置在所述内支架的上侧,冲击件上侧铰接在相应第二直线驱动器的输出端;
15、所述导向板安装在内支架的下侧,所述导向板上设置有导向槽,所述冲击件外侧设置有与所述导向槽相配合的导向件;
16、所述导向槽包括合拢段和设置在合拢段下侧的下行段。
17、优选的,所述合拢段上侧与钻头的距离大于所述合拢段下侧与钻头的距离;
18、所述合拢段的上侧也设有下行段,所述下行段纵向设置,
19、所述第二直线驱动器的输出端设置有第一连接件,所述冲击件上侧的安装件铰接在所述第一连接件上;
20、所述导向件上设置有与导向槽相配合的滚轮或轴承;
21、所述两个冲击件上分别设置有相对的凸台,两个凸台上设置有弹性限位件。
22、优选的,本发明还包括安装架和安装在所述安装架上的第一直线驱动器,
23、所述第一直线驱动器的输出端与所述内支架连接。
24、优选的,本发明还包括第三直线驱动器,所述内支架包括上板和下板,所述上板和下板之间设置有至少一个连接杆,
25、所述安装架内侧设置有导轨,
26、所述第三直线驱动器一端通过滑块安装在导轨上、另一端安装在连接杆上;
27、第二直线驱动器和落苗管安装在所述上板上,
28、所述下板上设置有供钻头通过的通孔;
29、所述安装架上设置有投苗管,所述投苗管与落苗管相配合,
30、所述投苗管上设置有至少一个水管接头;
31、所述安装架上设置有至少一个与内支架相配合的接近开关。
32、优选的,本发明还包括机体、储苗组件和送苗组件,
33、所述储苗组件和送苗组件分别设置在机体上,种植组件设置在机体的一端;
34、所述机体外侧设置有机壳,
35、所述机体一侧设置有储存箱,所述机体下侧设置电池组和和水箱;
36、所述机壳上设置有通信组件;
37、所述储苗组件包括设置在机体上侧的多个苗杯;
38、所述送苗组件包括安装在机体上的机械臂和安装在机械臂末端的取苗夹。
39、与现有技术相比,本发明的有益效果为:第四直线驱动器和覆土盘倾斜推动下,沙土或软性土质作向树孔的方向和向下的方向作复合运动,使沙土向树根的方向挤压、同时将浮沙或浮土推入到树坑中,从而将树苗的根部稳固在树坑内。
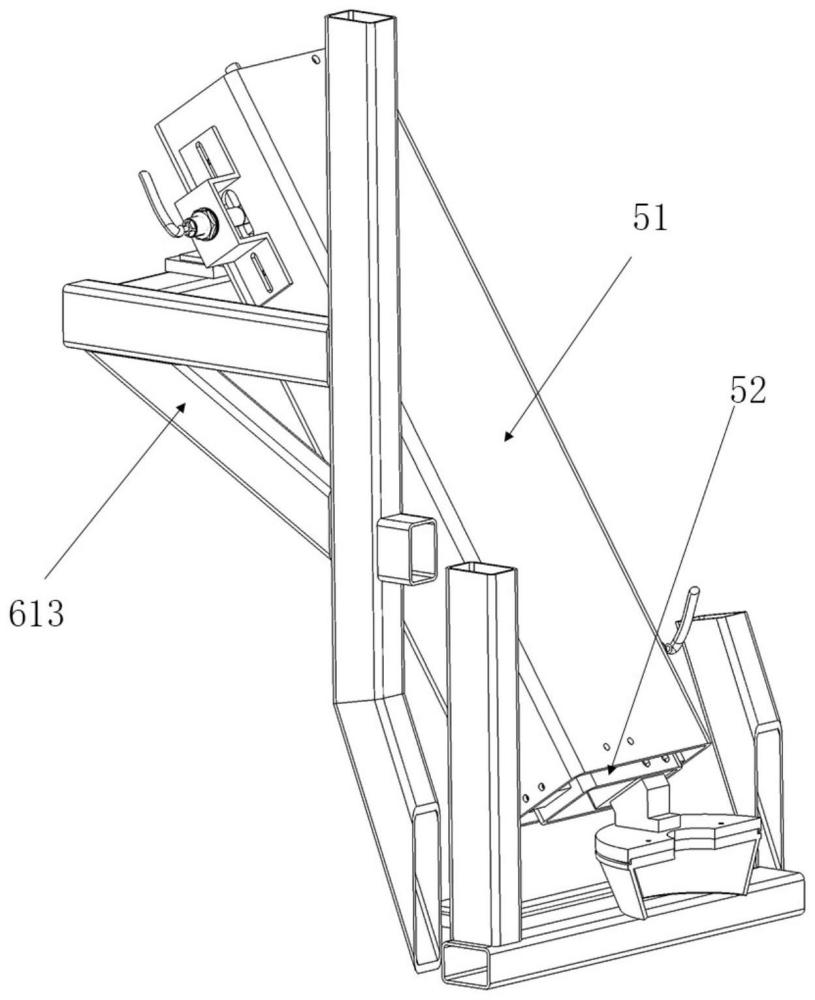
技术特征:1.一种种植机器人,其特征在于,包括安装架(61)和覆土组件(5),所述安装架(61)两侧分别设置有外支架(613),
2.根据权利要求1所述的种植机器人,其特征在于,所述第四直线驱动器(53)的输出端向安装架(61)的下侧倾斜;
3.根据权利要求1所述的种植机器人,其特征在于,所述覆土组件(5)还包括设置在所述外支架(613)上的外套管(51),所述外套管(51)内侧设置有内套管(52),所述第四直线驱动器(53)安装在内套管(52)内。
4.根据权利要求1所述的种植机器人,其特征在于,所述安装架(61)上设置有种植组件(6),
5.根据权利要求4所述的种植机器人,其特征在于,所述种植组件(6)包括内支架(62)、钻头(65)和落苗管(627),所述落苗管(627)安装在所述内支架(61)上,所述钻头安装在所述内支架(61)下侧,
6.根据权利要求5所述的种植机器人,其特征在于,所述种植组件还包括导向板(64)和第二直线驱动器(622),
7.根据权利要求6所述的种植机器人,其特征在于,所述合拢段(646)上侧与钻头(65)的距离大于所述合拢段(646)下侧与钻头(65)的距离;
8.根据权利要求6所述的种植机器人,其特征在于,还包括安装架(61)和安装在所述安装架(61)上的第一直线驱动器(621),
9.根据权利要求8所述的种植机器人,其特征在于,还包括第三直线驱动器(629),所述内支架(62)包括上板(625)和下板(626),所述上板(625)和下板(626)之间设置有至少一个连接杆(623),
10.根据权利要求1所述的种植机器人,还包括机体(12)、储苗组件(2)和送苗组件(3),
技术总结本发明公开了一种种植机器人,属于种植机器人技术领域,包括安装架和覆土组件,所述安装架两侧分别设置有外支架,所述覆土组件安装在所述外支架上,所述覆土组件包括所述覆土组件包括第四直线驱动器和覆土盘,所述第四直线驱动器倾斜设置在所述安装架一侧的外支架上,所述第四直线驱动器的驱动端与所述覆土盘连接。第四直线驱动器和覆土盘倾斜推动下,沙土或软性土质作向树孔的方向和向下的方向作复合运动,使沙土向树根的方向挤压、同时将浮沙或浮土推入到树坑中,从而将树苗的根部稳固在树坑内。技术研发人员:边力军,荆东明,徐媛媛,郑昌海,李海洋,赵岩龙,郝春燕受保护的技术使用者:易森智能装备(北京)有限公司技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240614/104039.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表