清洁基站及清洁系统的制作方法
- 国知局
- 2024-07-10 17:24:02
本技术涉及清洁设备领域,特别涉及一种清洁基站及清洁系统。
背景技术:
1、清洁机器人是对地面进行清洁的自动化装置,清洁机器人通常配合清洁基站使用,其中清洁基站能够对清洁机器人进行维护,例如对清洁机器人进行清洁、充电。
2、当清洁机器人停靠在充电位置后,清洁基站通过回充模块对清洁机器人充电,同时,清洁基站会对清洁机器人的清洁件进行清洗。现有的清洁基站中,对清洁件进行清洗的过程会使清洁机器人产生摆动,使得清洁机器人容易产生向远离回充模块的方向后溜,导致清洁机器人充电过程产生不必要的断开。
技术实现思路
1、本实用新型提供一种清洁基站及清洁系统,清洁基站能够防止清洁机器人在充电位置时产生远离回充模块的不必要移动,保证充电过程稳定有效进行。
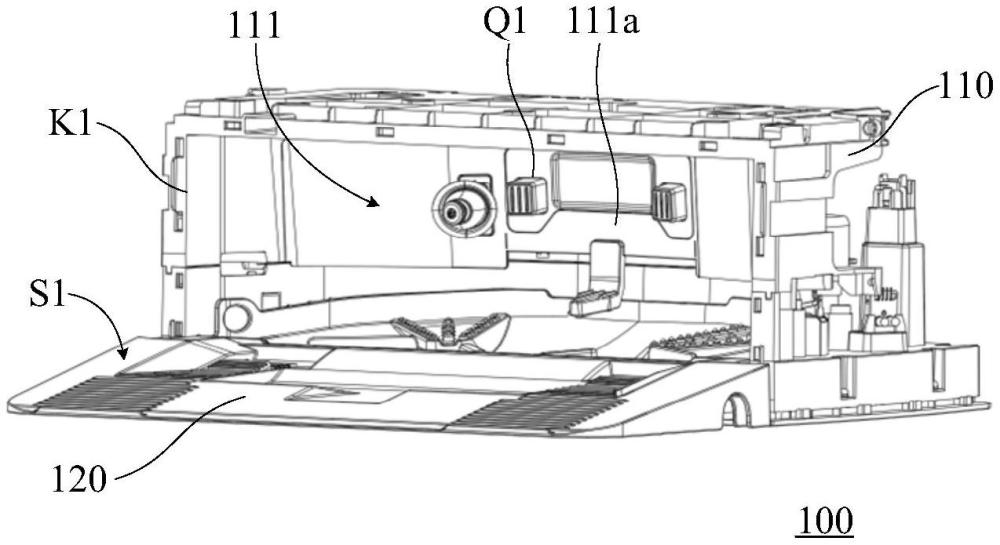
2、第一方面,本实用新型实施例提供一种清洁基站,其包括:基站本体,所述基站本体包括容纳腔以及回充模块,所述容纳腔位于所述基站本体邻近底部的侧面并具有开口,所述回充模块位于所述容纳腔中与所述开口相对的第一侧壁上;引导盘,所述引导盘与所述基站本体连接,并位于所述开口处,清洁机器人能够经由所述引导盘的上表面至少部分进入所述容纳腔内,其中,所述引导盘的所述上表面的预设位置直立设置有止退件,所述清洁机器人行走至所述引导盘上且位于充电位置的状态下,所述止退件位于所述清洁机器人的行走轮的远离所述回充模块的一侧,并与所述行走轮相抵,所述清洁机器人的主机极片与所述回充模块接触并电连接。
3、根据本实用新型实施例的清洁基站,清洁基站引导盘的上表面的预设位置直立设置有止退件,当清洁机器人行走至引导盘上,并且清洁机器人位于充电位置的状态下,止退件位于清洁机器人的行走轮的远离回充模块的一侧,并与行走轮相抵,此时清洁机器人的主机极片与回充模块接触并电连接,在清洁基站对清洁机器人的清洁件清洗使得清洁机器人产生摆动时,止退件止挡清洁机器人的行走轮,从而避免清洁机器人产生远离回充模块的不必要移动,清洁机器人的主机极片与回充模块能够稳定接触,从而保证充电过程稳定有效进行。
4、根据本实用新型第一方面的前述实施方式,所述止退件的朝向所述回充模块的一侧表面与所述上表面之间连接为夹角结构。在上述实施方式中,与上表面形成夹角结构的止退件,相对形成贴合行走轮的弧形结构,能够起到更好的止挡作用,进一步保证行走轮不会产生远离回充模块的不必要移动。
5、根据本实用新型第一方面的前述任一实施方式,所述上表面设有从所述止退件向所述回充模块所在方向延伸的限位槽,所述行走轮位于所述限位槽且与所述止退件相抵的状态下,所述限位槽在所述行走轮朝向所述回充模块的一侧具有允许所述行走轮行走的活动空间。在上述实施方式中,在清洁机器人位于充电位置后,由于限位槽在行走轮朝向回充模块的一侧具有允许行走轮行走的活动空间,使得清洁机器人仍然能够继续向进一步靠近回充模块的方向行进一段距离,从而使清洁机器人的主机极片与回充模块进一步紧密接触,提高对清洁机器人充电的稳定性。
6、根据本实用新型第一方面的前述任一实施方式,所述容纳腔的底壁设有清洗槽以及刮水筋,所述清洁机器人位于所述充电位置的状态下,所述清洗槽与所述清洁机器人的清洁件位置对应,所述刮水筋位于所述清洗槽朝向所述开口的一侧,所述清洁机器人退出所述容纳腔的过程中,所述刮水筋刮擦所述清洁机器人的清洁件。在上述实施方式中,通过清洗槽对清洁件清洗后,清洁件往往会携带大量水分,如果不及时去除清洁件上的水分而使清洁机器人退出清洁基站,清洁件容易将地面弄湿。上述实施方式中,在清洁机器人退出容纳腔的过程中,刮水筋刮擦清洁机器人的清洁件,从而将清洁件上的水分刮擦去除至少一部分,提高清洁机器人的使用体验。
7、根据本实用新型第一方面的前述任一实施方式,所述引导盘还包括位于所述上表面的防滑单元,所述防滑单元包括沿所述开口的进出方向排列的多个防滑齿条,每个所述防滑齿条垂直于所述进出方向延伸设置。在上述实施方式中,通过设置防滑单元,当清洁机器人在引导盘上行进时,行走轮不容易相对引导盘的上表面打滑,保证清洁机器人在引导盘上的有效行进。
8、根据本实用新型第一方面的前述任一实施方式,所述防滑单元为两个,并在垂直于所述进出方向的方向上并列设置,所述引导盘的所述上表面设有位于两个所述防滑单元之间的导流槽,其中,相邻所述防滑齿条之间形成防滑凹槽,至少部分所述防滑凹槽与所述导流槽连通,所述导流槽与所述防滑单元之间设有斜坡结构,使得至少部分所述防滑凹槽中的液体能够在重力作用下流向所述导流槽。在上述实施方式中,防滑齿条之间形成的防滑凹槽内容易遗留污物,通过设置导流槽和斜坡结构,至少部分防滑凹槽中的污物能够顺着防滑凹槽延伸方向,经过斜坡结构汇流到导流槽中,使得防滑凹槽内的污物更容易清理。
9、根据本实用新型第一方面的前述任一实施方式,所述上表面相对地面倾斜设置,所述导流槽包括第一子槽和第二子槽,所述第一子槽延伸于两个所述防滑单元之间,所述第二子槽位于所述第一子槽远离所述回充模块的一侧并与所述第一子槽连通,所述第二子槽远离所述第一子槽的一端呈开放结构。在上述实施方式中,从防滑凹槽中流到导流槽内的污物,能够依次经过第一子槽、第二子槽,经过第二子槽的开放结构向外排出,保证导流槽内的污物能够及时向外排出,避免导流槽、防滑单元的藏污纳垢现象。
10、根据本实用新型第一方面的前述任一实施方式,所述回充模块包括基站极片组件,所述基站极片组件包括基站极片、活动块以及弹性件,所述基站本体包括设置于所述第一侧壁的导向腔体,所述弹性件与所述活动块固定连接,所述活动块设置于所述导向腔体并相对所述导向腔体可直线活动,所述弹性件将所述活动块与所述基站本体弹性连接,使得所述基站极片具有外露于所述第一侧壁的初始状态。在上述实施方式中,活动块设置于导向腔体并相对导向腔体可直线活动,使得基站极片相对基站本体设置为直线伸缩结构,从清洁机器人的主机极片与基站极片刚接触到压缩基站极片的过程中,基站极片仅作直线伸缩运动,不产生上下摆动,从而避免基站极片与主机极片之间的摩擦,避免基站极片与主机极片之间产生滑移磨损,也保证两者之间的稳定接触,避免产生火花,提高了基站极片与主机极片的使用寿命以及充电的可靠性。
11、根据本实用新型第一方面的前述任一实施方式,所述上表面相对地面倾斜设置,所述回充模块包括用于收发光信号的光线收发件,所述光线收发件相对水平面倾斜向下安装。在上述实施方式中,由于上表面相对地面倾斜设置,位于引导盘上的清洁机器人也相对地面倾斜,光线收发件相对水平面倾斜向下安装,保证光线收发件的信号覆盖范围能够覆盖清洁机器人的更大区域,保证信号接收效率和接收稳定性。
12、第二方面,本实用新型实施例提供一种清洁系统,其包括:根据本实用新型第一方面的前述任一实施方式的清洁基站;以及清洁机器人,所述清洁机器人包括行走轮以及主机极片,清洁机器人行走至所述清洁基站的引导盘上且位于充电位置的状态下,所述止退件位于所述行走轮的远离所述回充模块的一侧,并与所述行走轮相抵,所述清洁机器人的主机极片与所述回充模块接触并电连接。
13、根据本实用新型实施例的清洁系统,其包括清洁基站和清洁机器人,清洁基站引导盘的上表面的预设位置直立设置有止退件,当清洁机器人行走至引导盘上,并且清洁机器人位于充电位置的状态下,止退件位于清洁机器人的行走轮的远离回充模块的一侧,并与行走轮相抵,此时清洁机器人的主机极片与回充模块接触并电连接,在清洁基站对清洁机器人的清洁件清洗使得清洁机器人产生摆动时,止退件止挡清洁机器人的行走轮,从而避免清洁机器人产生远离回充模块的不必要移动,清洁机器人的主机极片与回充模块能够稳定接触,从而保证充电过程稳定有效进行。
本文地址:https://www.jishuxx.com/zhuanli/20240615/62952.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表