一种爬壁泳池清洁机器人的制作方法
- 国知局
- 2024-07-10 18:11:43
本发明涉及泳池清洁,特别是涉及一种爬壁泳池清洁机器人。
背景技术:
1、泳池清洁机器人用于清洁游泳池或水体内的污物,根据清洁部位的不同,可以分为水面清洁机器人和池底清洁机器人,水面清洁机器人主要考虑能够漂浮在水面并能够浮动,水底清洁机器人需要考虑沉在水底并能够在水底进行行走,无论是上述哪种泳池清洁机器人,都包含有机体和清洁装置。
2、除了水面和水底需要清洁外,泳池的侧壁也需要进行清理,然而,无论是水面清洁机器人还是水底清洁机器人均无法在侧壁上行走而完成清理,此时,就需要能够爬墙的泳池清洁机器人进行清理。现有技术中已经有可以爬墙的泳池清洁机器人,但需要耗费较多的能量用于将泳池清洁机器人贴附或吸附在侧壁的墙面上,无线缆的泳池清洁机器人由于清洁效率较低且无外接电源而导致续航时间较短,有线缆的泳池清洁机器人虽然有外接电源持续供电,但应用较为不便,同时也存在清洁效率低下的问题。
3、如果想要提高可爬墙的泳池清洁机器人的续航能力,要么增大电池容量或采用有线缆形式,要么需要提高清洁效率,而电池容量的增大势必会造成成本的提高,有线缆的形式又操作不便,因此,如何在泳池清洁机器人结构上改进以提高清洁效率是本领域技术人员需要考虑的技术问题。
技术实现思路
1、本发明的目的是提供一种爬壁泳池清洁机器人,以解决上述现有技术存在的问题,通过控制不同侧的行走电机具有不同转速能够控制机体转向,在同侧的滚刷本体和行走履带同步加减速的基础上,能够使得转向更加灵活、转弯半径更小、行走路径更好控制,从而能够提高清洁效率,进而提高续航能力。
2、为实现上述目的,本发明提供了如下方案:
3、本发明提供一种爬壁泳池清洁机器人,包括机体、位于所述机体两侧的行走组件以及位于所述机体前侧的滚刷组件,所述滚刷组件包括支撑轴以及转动设置在所述支撑轴上的两段滚刷本体,所述支撑轴连接在所述机体上,所述行走组件包括行走电机以及连接所述行走电机的第一输出端和第二输出端,所述第一输出端连接有行走履带,所述第二输出端连接所述滚刷本体,所述机体的不同侧的行走电机能够分别控制转速,所述机体的同侧的行走履带和滚刷本体能够同步加减速。
4、优选地,所述行走电机连接有主动齿轮,所述主动齿轮连接有第一从动齿轮和第二从动齿轮,所述第一从动齿轮啮合连接有所述行走履带,通过所述第一从动齿轮的转动驱动所述行走履带运行,所述第二从动齿轮通过动力传输结构连接所述滚刷本体,通过所述第二从动齿轮的转动驱动所述滚刷本体运行。
5、优选地,所述动力传输结构包括第一伞齿轮、第二伞齿轮、第三伞齿轮、第四伞齿轮和传动杆,所述第一伞齿轮与所述第二从动齿轮同轴连接,所述第二伞齿轮和所述第三伞齿轮分别同轴连接在所述传动杆的两端,所述第四伞齿轮与所述滚刷本体同轴连接,所述第一伞齿轮啮合所述第二伞齿轮,所述第三伞齿轮啮合所述第四伞齿轮。
6、优选地,所述滚刷本体包括筒体以及设置在所述筒体表面的毛刷和软胶片,所述毛刷和所述软胶片分别在所述筒体的轴向间隔设置,同时,所述毛刷和所述软胶片在所述筒体的周向间隔分布。
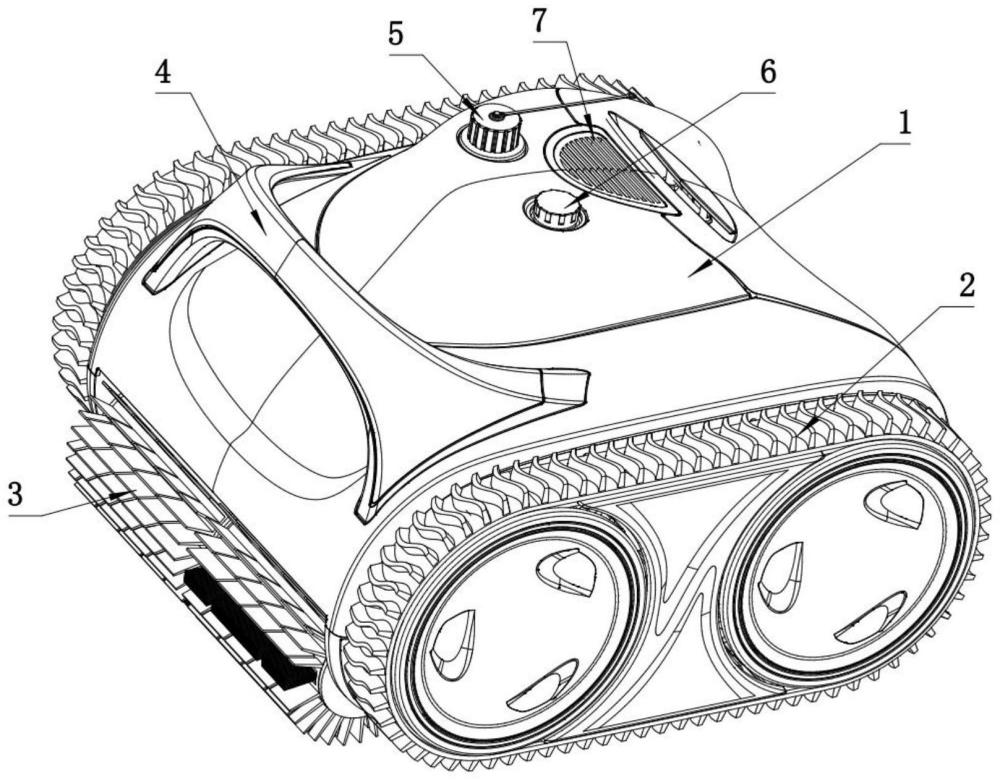
7、优选地,包括滤篮和叶轮,所述机体的底部设置有进水口,所述进水口连接所述滤篮的进口,所述机体的顶部设置有出水口,所述出水口连接所述叶轮的出口;所述出水口向所述机体的后侧倾斜,所述进水口相对所述出水口靠近所述机体的后侧。
8、优选地,所述滤篮的进口设置有橡胶挡板,所述橡胶挡板的一侧连接所述滤篮,另一侧自由延伸,所述橡胶挡板的一侧设置有便于其向所述滤篮内部翻折的凹槽。
9、优选地,所述机体内设置有集成组件,所述集成组件包括底板、控制舱和电池模块,所述控制舱呈门洞型安装在所述底板上,所述控制舱的门洞内设置有所述电池模块,所述控制舱内设置有行走电机、抽水电机和控制模块。
10、优选地,所述控制舱的顶部设置有旋钮开关和电源接口,所述旋钮开关和所述电源接口由下向上穿出所述机体的壳体,所述旋钮开关和所述电源接口分别设置有防水盖。
11、优选地,所述控制舱设置有入水检测装置,所述入水检测装置与所述控制模块电性连接,所述入水检测装置检测到入水时机器人启动运行,所述入水检测装置检测到出水时机器人停止运行。
12、优选地,所述机体的顶部前侧设置有把手,所述机体的后侧设置有泄水口。
13、本发明相对于现有技术取得了以下技术效果:
14、本发明通过设置两段滚刷本体,每段滚刷本体分别与同侧的行走组件动力连接,能够利用行走组件的行走电机作为动力源驱动滚刷本体运行,从而使得同侧的滚刷本体和行走履带同步加减速,通过控制不同侧的行走电机具有不同转速能够控制机体转向,在同侧的滚刷本体和行走履带同步加减速的基础上,能够使得转向更加灵活、转弯半径更小、行走路径更好控制,从而能够提高清洁效率,进而提高续航能力。
技术特征:1.一种爬壁泳池清洁机器人,其特征在于:包括机体、位于所述机体两侧的行走组件以及位于所述机体前侧的滚刷组件,所述滚刷组件包括支撑轴以及转动设置在所述支撑轴上的两段滚刷本体,所述支撑轴连接在所述机体上,所述行走组件包括行走电机以及连接所述行走电机的第一输出端和第二输出端,所述第一输出端连接有行走履带,所述第二输出端连接所述滚刷本体,所述机体的不同侧的行走电机能够分别控制转速,所述机体的同侧的行走履带和滚刷本体能够同步加减速。
2.根据权利要求1所述的爬壁泳池清洁机器人,其特征在于:所述行走电机连接有主动齿轮,所述主动齿轮连接有第一从动齿轮和第二从动齿轮,所述第一从动齿轮啮合连接有所述行走履带,通过所述第一从动齿轮的转动驱动所述行走履带运行,所述第二从动齿轮通过动力传输结构连接所述滚刷本体,通过所述第二从动齿轮的转动驱动所述滚刷本体运行。
3.根据权利要求2所述的爬壁泳池清洁机器人,其特征在于:所述动力传输结构包括第一伞齿轮、第二伞齿轮、第三伞齿轮、第四伞齿轮和传动杆,所述第一伞齿轮与所述第二从动齿轮同轴连接,所述第二伞齿轮和所述第三伞齿轮分别同轴连接在所述传动杆的两端,所述第四伞齿轮与所述滚刷本体同轴连接,所述第一伞齿轮啮合所述第二伞齿轮,所述第三伞齿轮啮合所述第四伞齿轮。
4.根据权利要求1所述的爬壁泳池清洁机器人,其特征在于:所述滚刷本体包括筒体以及设置在所述筒体表面的毛刷和软胶片,所述毛刷和所述软胶片分别在所述筒体的轴向间隔设置,同时,所述毛刷和所述软胶片在所述筒体的周向间隔分布。
5.根据权利要求1所述的爬壁泳池清洁机器人,其特征在于:包括滤篮和叶轮,所述机体的底部设置有进水口,所述进水口连接所述滤篮的进口,所述机体的顶部设置有出水口,所述出水口连接所述叶轮的出口;所述出水口向所述机体的后侧倾斜,所述进水口相对所述出水口靠近所述机体的后侧。
6.根据权利要求5所述的爬壁泳池清洁机器人,其特征在于:所述滤篮的进口设置有橡胶挡板,所述橡胶挡板的一侧连接所述滤篮,另一侧自由延伸,所述橡胶挡板的一侧设置有便于其向所述滤篮内部翻折的凹槽。
7.根据权利要求1所述的爬壁泳池清洁机器人,其特征在于:所述机体内设置有集成组件,所述集成组件包括底板、控制舱和电池模块,所述控制舱呈门洞型安装在所述底板上,所述控制舱的门洞内设置有所述电池模块,所述控制舱内设置有行走电机、抽水电机和控制模块。
8.根据权利要求7所述的爬壁泳池清洁机器人,其特征在于:所述控制舱的顶部设置有旋钮开关和电源接口,所述旋钮开关和所述电源接口由下向上穿出所述机体的壳体,所述旋钮开关和所述电源接口分别设置有防水盖。
9.根据权利要求7所述的爬壁泳池清洁机器人,其特征在于:所述控制舱设置有入水检测装置,所述入水检测装置与所述控制模块电性连接,所述入水检测装置检测到入水时机器人启动运行,所述入水检测装置检测到出水时机器人停止运行。
10.根据权利要求1所述的爬壁泳池清洁机器人,其特征在于:所述机体的顶部前侧设置有把手,所述机体的后侧设置有泄水口。
技术总结本发明公开一种爬壁泳池清洁机器人,属于泳池清洁技术领域,包括机体、位于机体两侧的行走组件以及位于机体前侧的滚刷组件,滚刷组件包括支撑轴以及转动设置在支撑轴上的两段滚刷本体,支撑轴连接在机体上,行走组件包括行走电机以及连接行走电机的第一输出端和第二输出端,第一输出端连接有行走履带,第二输出端连接滚刷本体,机体的不同侧的行走电机能够分别控制转速,机体的同侧的行走履带和滚刷本体能够同步加减速。本发明通过控制不同侧的行走电机具有不同转速能够控制机体转向,在同侧的滚刷本体和行走履带同步加减速的基础上,能够使得转向更加灵活、转弯半径更小、行走路径更好控制,从而能够提高清洁效率,进而提高续航能力。技术研发人员:魏恩雨,田胜存,马超,耿鹤,车文杨,杜志刚受保护的技术使用者:远大健康科技(天津)股份有限公司技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240615/66841.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表