数控榫槽机精准定位机构的制作方法
- 国知局
- 2024-07-11 15:15:44
本技术涉及榫槽加工设备的,特别是涉及一种数控榫槽机精准定位机构。
背景技术:
1、木质产品在制作的过程中,由于木料的特殊物理性质,所以无法进行如铁、塑料等材料的塑形,而只能是通过多块木料之间进行相互拼接成型。具体的,在进行木料之间进行拼接的时候,往往选择卯榫等连接方式进行。虽然,有更加简单的利用铁钉进行连接的组装方式;但是,一方面由于金属的氧化作用,容易使铁钉生锈而致使连接失效;另一方面,铁钉钉入木料后,会对木料本身造成不可逆的破坏,从而,带有铁钉的木料报废后,影响木料的二次回收利用。此外,而采用卯榫等方式进行木制品作业的时候,经常需要打孔;而现今,由于各种新材质的出现,对产品本身的精度要求越来越高。而木质品由于其无法塑形,无法做到如塑料制品或者金属制品这样的精确度;所以,只能在进行拼接工序的时候,对孔位进行精确控制,以确保产品的精度。
2、由此,榫槽机应运而生;所述的榫槽机是一种加工木料上矩形榫槽或腰圆形榫槽的木工加工机床。而现有木质产品的生产过程中,打孔工序往往是需要通过手动的木工榫槽机进行的,手动的木工榫槽机进行打孔的时候,需要工人通过眼力进行判断。而这种方式及其容易受到外界的干扰,如光线、人工误差等方面,容易造成工作效率低、定位精度不高以及一致性欠佳等缺陷。
3、基于此,中国专利cn104858946a公开了一种木工榫槽机,其包括机架,所述机架之上设置有横纵装置,所述横纵装置上分别设置有工作台和打孔机;所述横向装置上设置有横向移动传感装置,所述横向移动传感装置包括限位开关和狭缝开关;所述纵向装置上设置有纵向移动传感装置,所述纵向移动传感装置为接近开关。
4、然而,上述所公开的木工榫槽机还存在加工定位不够精准的技术问题。具体的,该种木工榫槽机的定位机构设置方式为:其设置有工作台,所述工作台包括工作台台面上的支架,该支架上设置有夹持气缸。该夹持气缸的输出轴贯穿支架后设置有推板。所述工作台上相对应于推板设置有相应的挡板;通过推板和挡板的相应作用,可以对木块进行夹持。然而,在实际的生产实践中发现,仅通过推板和挡板的相对夹持动作而定位的材料容易出现晃动、翻起以及定位不准的缺陷。例如,目前的材料加工需求中,圆棒料木材或多边形的木材较为常见,该类的木材难以被两夹板所牢固定位;在榫槽时多出现定位不准确的现象;即使在下刀时木材被有效定位了,但加工中或收刀时也容易因晃动而发生定位偏差。
技术实现思路
1、基于此,有必要针对现有技术的榫槽机所存在的容易出现定位偏差的技术问题,提供一种数控榫槽机精准定位机构。
2、一种数控榫槽机精准定位机构,其包括:工作台、固定部、移动夹持部、第一驱动机构、弯爪结构、第二驱动机构以及固定连接板;所述工作台之中设置所述固定部;所述移动夹持部与所述固定部相对设置;所述移动夹持部活动设置于所述工作台之中。所述第一驱动机构设置于所述移动夹持部的侧面,所述第一驱动机构具有第一动力气缸以及第一伸缩杆;所述第一动力气缸与所述第一伸缩杆动力连接;所述第一伸缩杆与所述移动夹持部相连。所述弯爪结构为弧形的结构,所述弯爪结构的一端与所述移动夹持部相连;所述第二驱动机构设置于所述第一驱动机构的上方,所述第二驱动机构具有第二动力气缸以及第二伸缩杆;所述第二动力气缸与所述第二伸缩杆动力连接;所述第二伸缩杆与所述弯爪结构相连。所述固定连接板固定连接于所述工作台之上;所述固定连接板的上、下面分别连接所述第二驱动机构与所述第一驱动机构。
3、进一步的,所述工作台之中设置有调整槽;所述固定部与所述移动夹持部分别相对设置于所述调整槽之中。
4、更进一步的,所述固定部具有挡块以及滑动块;所述挡块的下方设置所述滑动块;所述滑动块与所述调整槽活动连接。
5、更进一步的,所述工作台的下方设置有支撑块;所述滑动块设置于所述支撑块之上。
6、更进一步的,所述支撑块之上设置有调节机构;所述滑动块的下端与所述调节机构相连。
7、更进一步的,所述调节机构具有调节动力气缸以及调节伸缩杆。
8、更进一步的,所述调节动力气缸与所述支撑块固定连接。
9、更进一步的,所述调节伸缩杆分别连接所述滑动块与所述调节动力气缸。
10、更进一步的,所述移动夹持部具有移动板以及两夹持块。
11、更进一步的,所述移动板活动连接于所述调整槽;两所述夹持块分别设置于所述移动板的两端部。
12、综上所述,本实用新型数控榫槽机精准定位机构分别设有工作台、固定部、移动夹持部、第一驱动机构、弯爪结构、第二驱动机构以及固定连接板;所述工作台之中设置所述固定部;所述移动夹持部与所述固定部相对设置;所述移动夹持部活动设置于所述工作台之中。所述第一驱动机构设置于所述移动夹持部的侧面,所述弯爪结构为弧形的结构,所述弯爪结构的一端与所述移动夹持部相连;所述第二驱动机构设置于所述第一驱动机构的上方,所述弯爪结构与所述第二驱动机构相连;所述固定连接板固定连接于所述工作台之上;所述固定连接板的上、下面分别连接所述第二驱动机构与所述第一驱动机构。所述移动夹持部与所述弯爪结构可以同时沿所述工作台之上移动;并且,当所述移动夹持部完成定位工件后,所述第二驱动机构仍然持续通电,并继续推动所述弯爪结构。此时,所述弯爪结构可以以其与所述移动夹持部的连接处为支点而翻起;所述弯爪结构翻起后其另一端部落下外部的工件之上;并对工件的上方也进行定位夹持。此时,该工件的上下左右四个方向均能被有效定位并锁紧;以该工件在榫槽加工时能保持准确的定位。所以,本实用新型数控榫槽机解决了现有技术的榫槽机所存在的容易出现定位偏差的技术问题。
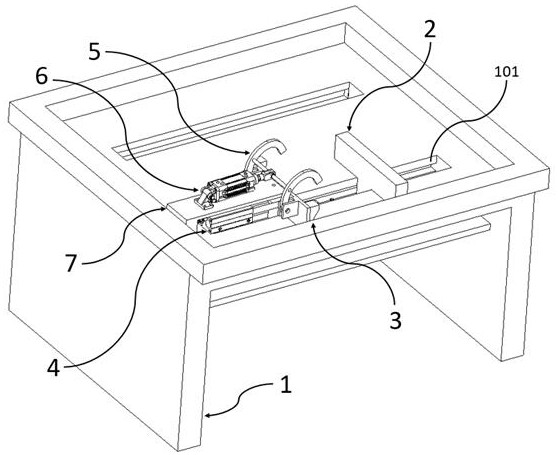
技术特征:1.一种数控榫槽机精准定位机构,其特征在于,其包括:工作台(1)、固定部(2)、移动夹持部(3)、第一驱动机构(4)、弯爪结构(5)、第二驱动机构(6)以及固定连接板(7);所述工作台(1)之中设置所述固定部(2);所述移动夹持部(3)与所述固定部(2)相对设置;所述移动夹持部(3)活动设置于所述工作台之中;所述第一驱动机构(4)设置于所述移动夹持部(3)的侧面,所述第一驱动机构(4)具有第一动力气缸(401)以及第一伸缩杆(402);所述第一动力气缸(401)与所述第一伸缩杆(402)动力连接;所述第一伸缩杆(402)与所述移动夹持部(3)相连;所述弯爪结构(5)为弧形的结构,所述弯爪结构(5)的一端与所述移动夹持部(3)相连;所述第二驱动机构(6)设置于所述第一驱动机构(4)的上方,所述第二驱动机构(6)具有第二动力气缸(601)以及第二伸缩杆(602);所述第二动力气缸(601)与所述第二伸缩杆(602)动力连接;所述第二伸缩杆(602)与所述弯爪结构(5)相连;所述固定连接板(7)固定连接于所述工作台(1)之上;所述固定连接板(7)的上、下面分别连接所述第二驱动机构(6)与所述第一驱动机构(4)。
2.根据权利要求1所述的数控榫槽机精准定位机构,其特征在于:所述工作台(1)之中设置有调整槽(101);所述固定部(2)与所述移动夹持部(3)分别相对设置于所述调整槽(101)之中。
3.根据权利要求2所述的数控榫槽机精准定位机构,其特征在于:所述固定部(2)具有挡块(201)以及滑动块(202);所述挡块(201)的下方设置所述滑动块(202);所述滑动块(202)与所述调整槽(101)活动连接。
4.根据权利要求3所述的数控榫槽机精准定位机构,其特征在于:所述工作台(1)的下方设置有支撑块(102);所述滑动块(202)设置于所述支撑块(102)之上。
5.根据权利要求4所述的数控榫槽机精准定位机构,其特征在于:所述支撑块(102)之上设置有调节机构(8);所述滑动块(202)的下端与所述调节机构(8)相连。
6.根据权利要求5所述的数控榫槽机精准定位机构,其特征在于:所述调节机构(8)具有调节动力气缸(801)以及调节伸缩杆(802)。
7.根据权利要求6所述的数控榫槽机精准定位机构,其特征在于:所述调节动力气缸(801)与所述支撑块(102)固定连接。
8.根据权利要求7所述的数控榫槽机精准定位机构,其特征在于:所述调节伸缩杆(802)分别连接所述滑动块(202)与所述调节动力气缸(801)。
9.根据权利要求8所述的数控榫槽机精准定位机构,其特征在于:所述移动夹持部(3)具有移动板(301)以及两夹持块(302)。
10.根据权利要求9所述的数控榫槽机精准定位机构,其特征在于:所述移动板(301)活动连接于所述调整槽(101);两所述夹持块(302)分别设置于所述移动板(301)的两端部。
技术总结本技术公开了数控榫槽机精准定位机构,其属于榫槽加工设备的技术领域,其包括:工作台、固定部、移动夹持部、第一驱动机构、弯爪结构、第二驱动机构以及固定连接板;工作台之中设置固定部;移动夹持部与固定部相对设置;移动夹持部活动设置于工作台之中。第一驱动机构设置于移动夹持部的侧面,弯爪结构为弧形的结构,弯爪结构的一端与移动夹持部相连;第二驱动机构设置于第一驱动机构的上方,弯爪结构与第二驱动机构相连;固定连接板固定连接于工作台之上;固定连接板的上、下面分别连接第二驱动机构与第一驱动机构。本技术数控榫槽机解决了现有技术的榫槽机所存在的容易出现定位偏差的技术问题。技术研发人员:李一军,徐剑亮受保护的技术使用者:博罗县昶丰精密机械设备有限公司技术研发日:20230714技术公布日:2024/1/5本文地址:https://www.jishuxx.com/zhuanli/20240615/73529.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表