上下肢训练系统的制作方法
- 国知局
- 2024-07-11 16:12:22
本发明涉及运动设备,具体地,涉及一种上下肢训练系统。
背景技术:
1、现有的动感单车只能进行单一的骑行训练,仅能起到训练下肢体的作用,无法实现多功能训练。现有的一些能够实现多功能训练的健身器,在训练时,仅允许一人进行一项训练,且用户训练时不能得到专业的指导。
2、公开号为cn217645774u的专利文献公开了一种用于体育训练的单车训练装置,包括单车主体、横梁和两个落地支架,所述落地支架顶端开设有两个第一凹槽,所述落地支架底端开设有两个第二凹槽,所述第二凹槽设在第一凹槽底部,所述第一凹槽内部设有螺纹杆,且所述螺纹杆底端延伸至第二凹槽内部,所述落地支架和螺纹杆通过螺纹连接,所述螺纹杆底端通过轴承活动连接有落地板,所述落地板设在第二凹槽内部。但是该专利文献的训练装置只能进行单一的骑行训练,无法实现多功能能的训练。
3、公开号为cn108379782b的专利文献公开了一种多功能健身器,包括机架、高度调节组件和两个脚踏组件,机架上设置有主轴;脚踏组件包括脚踏、支撑架、后摆臂、前摆臂和连杆机构,连杆机构包括曲柄、连杆组件和摇杆,连杆组件包括第一连杆、第二连杆和第三连杆,曲柄固定在主轴的对应端部上,摇杆铰接在机架上,第一连杆与曲柄铰接,第二连杆与摇杆铰接,第三连杆与机架铰接;脚踏安装在支撑架的后端部,后摆臂的下端部铰接在支撑架的中部,前摆臂的下端部铰接在支撑架的前端部,后摆臂的上端部铰接在机架上,前摆臂的上端部铰接在摇杆上。但是该专利文献的健身器在训练时,仅允许一人进行一项训练,且用户训练时不能得到专业的指导。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种上下肢训练系统。
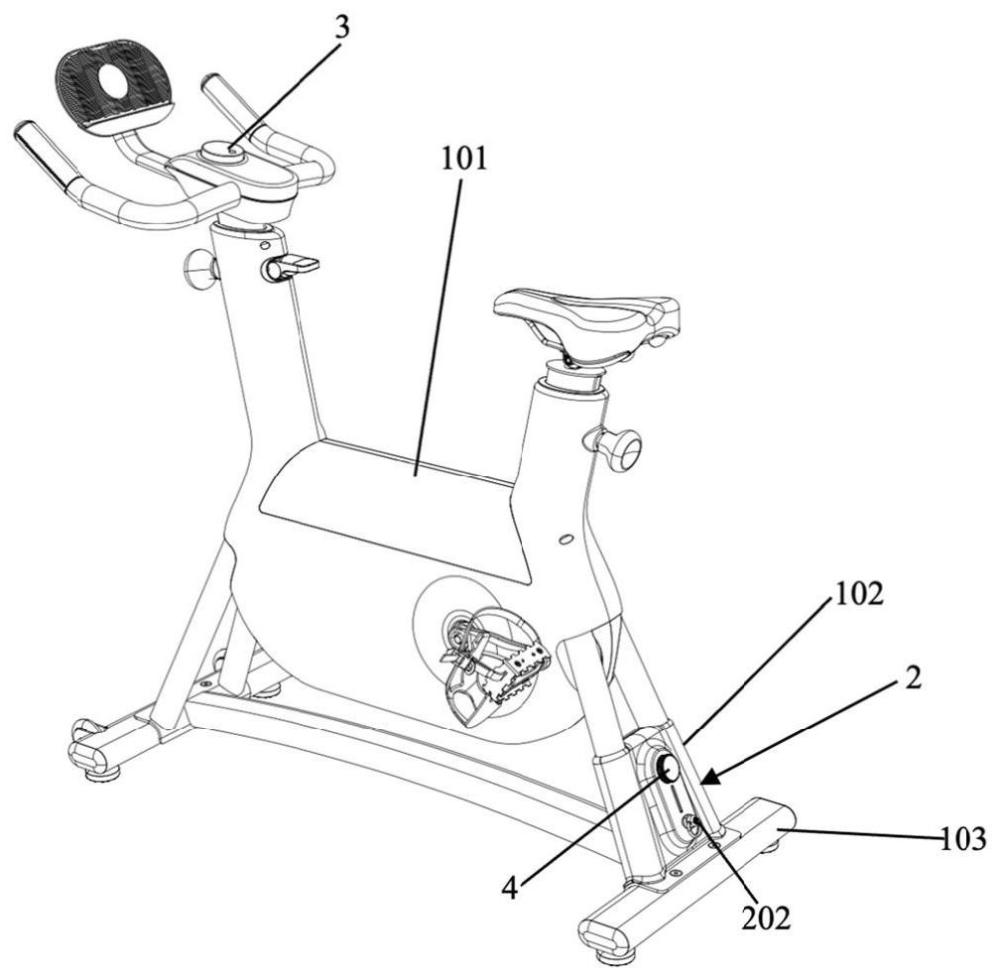
2、根据本发明提供的一种上下肢训练系统,包括:训练单车、拉力训练装置、上控模块以及下控模块;所述上控模块、所述下控模块以及所述拉力训练装置设置在所述训练单车上;
3、所述上控模块与所述训练单车相连接,用于采集所述训练单车的运动数据,及控制调节所述训练单车的阻力;所述下控模块与所述拉力训练装置相连接,用于采集所述拉力训练装置的训练数据,及控制调节所述拉力训练装置的拉力档位;
4、所述上控模块和所述下控模块相连接,所述上控模块能够与移动终端设备通信连接;
5、所述上控模块根据所述移动终端设备的指令调节所述训练单车的阻力,或者将指令转发给所述下控模块来调节所述拉力训练装置的拉力档位。
6、优选的,所述上控模块包括:上控电路板、上控旋钮以及上控传感器;
7、所述上控旋钮和所述上控传感器与所述上控电路板相连接;
8、所述上控传感器用于收集所述训练单车的骑行训练数据,并将骑行训练数据通过所述上控电路板传输给所述移动终端设备和所述上控旋钮,所述上控旋钮的屏幕能够显示其接收的骑行训练数据。
9、优选的,所述下控模块包括:下控电路板、下控旋钮以及下控传感器;
10、所述下控传感器和所述下控旋钮与所述下控电路板相连接,所述下控电路板与所述上控电路板相连接;
11、所述下控传感器用于收集所述拉力训练装置的拉力训练数据,并将拉力训练数据通过所述下控电路板传输给所述上控电路板和所述下控旋钮,所述下控旋钮的屏幕能够显示其接收的拉力训练数据。
12、优选的,所述骑行训练数据包括:骑行时的转速rpm、档位、功率;
13、和/或,所述拉力训练数据包括:拉力锻炼时的拉力、拉绳长度、拉出次数、档位、功率。
14、优选的,通过调节所述上控旋钮改变阻力档位,所述上控旋钮通过所述上控电路板将阻力档位调节信号传输给所述移动终端设备,所述移动终端设备下发阻力档位调节的命令给所述上控电路板,所述上控电路板控制所述训练单车进行调档;
15、和/或,通过调节所述下控旋钮改变阻力档位,所述下控旋钮通过所述下控电路板和所述上控电路板将阻力档位调节信号传输给所述移动终端设备,所述移动终端设备下发阻力档位调节的命令给所述上控电路板,所述上控电路板将阻力档位调节的命令再下发给所述下控电路板,所述下控电路板控制所述拉力训练装置进行调档。
16、优选的,所述拉力训练装置包括:调节组件、卷簧仓、卷簧、拉绳盒、转动轴以及拉绳组件;
17、所述卷簧仓转动设置在所述转动轴上,所述卷簧设置在所述卷簧仓内,所述卷簧的第一连接端与所述卷簧仓的内侧壁固定连接,所述卷簧的第二连接端与所述转动轴固定连接;
18、所述拉绳盒与所述转动轴固定连接,所述拉绳组件的部分拉绳缠绕设置在所述拉绳盒上;
19、所述卷簧仓和所述拉绳盒与所述调节组件连接设置,所述调节组件与所述下控电路板相连接。
20、优选的,所述调节组件包括:驱动组件、驱动控制电路、角度检测模块以及转速检测模块;
21、所述驱动组件与所述卷簧仓驱动连接,所述角度检测模块与所述卷簧仓的中轴连接设置,所述转速检测模块与所述拉绳盒连接设置,所述角度检测模块用于检测所述卷簧仓的转动角度,所述转速检测模块用于检测所述拉绳盒的正反转和正反转的转速;
22、所述角度检测模块和所述转速检测模块与所述下控电路板相连接,所述下控电路板与所述驱动控制电路相连接,所述驱动组件与所述驱动控制电路相连接。
23、优选的,所述驱动组件为减速电机;
24、所述减速电机的输出端设置有电机齿轮,所述卷簧仓上设置有卷簧仓外齿轮,所述卷簧仓外齿轮与所述电机齿轮啮合连接。
25、优选的,所述角度检测模块包括:包括固定板、丝杆、导杆以及挡板;
26、所述丝杆转动连接在所述固定板下部,所述导杆固定连接在所述固定板上部,所述丝杆一端螺纹连接在所述挡板的下部,所述挡板的上部滑动连接在所述导杆上,所述丝杆的另一端穿过所述固定板连接所述卷簧仓的转轴,所述卷簧仓与所述转轴同步转动设置;所述固定板朝向所述挡板的一侧壁上设置有红外收发组件,所述红外收发组件包括固定安装在所述固定板上的红外发射管和红外接收管;
27、所述转速检测模块包括:第一霍尔传感器、第二霍尔传感器以及磁铁;
28、所述磁铁设置在所述拉绳盒的一侧壁上,所述拉绳盒转动时能够带动所述磁铁转动,所述第一霍尔传感器和所述第二霍尔传感器设置在所述拉绳盒的一侧,所述磁铁转动时能够依次经过所述第一霍尔传感器、所述第二霍尔传感器。
29、优选的,所述驱动控制电路包括:h桥芯片u1、电容c1、电容c2、电容c3、电阻r1以及连接器;
30、所述h桥芯片u1的第一连接端和第二连接端与所述下控电路板连接;
31、所述电阻r1的一端接地,所述电阻r1的另一端连接所述h桥芯片u1的第三连接端;
32、所述电容c2的正极连接分别所述电容c3的一端和所述h桥芯片u1的第四连接端,并作为电源端子;所述电容c2的负极连接所述电容c3的另一端,并接地;
33、所述h桥芯片u1的第五连接端分别连接所述h桥芯片u1的第六连接端、所述电容c1的一端以及所述连接器的第一连接端;
34、所述h桥芯片u1的第七连接端分别连接所述h桥芯片u1的第八连接端、所述电容c1的另一端以及所述连接器的第二连接端;
35、所述连接器的第三连接端和所述连接器的第四连接端均接地,所述连接器与所述驱动组件相连接;
36、所述驱动控制电路还包括:电流检测电路;所述电流检测电路包括:电容c4、电容c5、电阻r2、电阻r3、电阻r4、电阻r5、运算放大器以及整流板;
37、所述电阻r2的一端连接所述h桥芯片u1的第一连接端,所述电阻r2的另一端连接所述运算放大器的同相输入端;
38、所述电阻r3的一端接地,所述电阻r3的另一端分别连接所述运算放大器的反相输入端和所述电阻r5的一端;
39、所述运算放大器的正电源端接地;所述运算放大器的负电源端连接所述电容c5的一端,并作为电源端子;所述运算放大器的输出端分别连接所述电阻r4的一端和所述电阻r5的另一端;
40、所述电阻r4的另一端分别连接所述电容c4的一端和所述整流板;所述电容c4的另一端连接所述电容c5的另一端,并接地。
41、与现有技术相比,本发明具有如下的有益效果:
42、1、相比于传统的训练单车,本发明将训练单车和拉伸训练装置相结合,能够实现上肢和下肢的训练,训练方式多样,还可以连接移动设备,跟课训练,同时还可以根据需要调节训练时的阻力。
43、2、本发明通过调节单个或多个卷簧实现档位的无极调节,用减速电机调节单个卷簧的外圈或同时调节多个卷簧的外圈,从而调节了卷簧的松紧,进而实现了档位调节,卷簧的内圈用于被旋转拉出,档位越大,拉力越大。
44、3、本发明同时安装有多圈角度传感器,时时检测卷簧外圈所处的位置或圈数,再由单片机对减速电机进行控制,实现精确的角度调节。
45、4、本发明的单片机从多圈角度传感器检测出卷簧外圈处于哪个角度,若与设定角度有偏差,则控制电机调节卷簧外圈到达设定角度;单片机通过霍尔传感器检测拉绳距离的检测,两个霍尔传感器结合一个磁铁,实现卷簧内圈正反转的测速,由转速转化成距离。
46、5、本发明的拉力训练装置设置在训练单车的后端,在进行拉伸训练时,通过拉动拉绳,拉绳连接卷簧仓,卷簧仓和卷簧配合产生阻力,进而实现力量训练的目的。
47、6、本发明的拉力训练装置结合单车的结构形式,能够实现多种锻炼方式,比如:正对着训练单车的后端进行拉伸,侧对着训练单车的后端进行拉伸,坐着正对着训练单车的后端进行拉伸,背对着训练单车的后端进行拉伸;不仅可以通过手臂进行拉伸训练,还是可以通过腿部进行拉伸训练;当拉伸力较大时,可以通过手或脚对训练单车进行固定,再进行拉伸。
本文地址:https://www.jishuxx.com/zhuanli/20240615/78065.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表