一种智能消防控制机器人、消防控制器、系统及其方法与流程
- 国知局
- 2024-07-05 16:55:28
本技术涉及消防设备领域,尤其涉及一种智能消防控制机器人、消防控制器、系统及其方法。
背景技术:
1、消防控制室作为重要的消防安全相关作业场所,通常设置有火灾报警联动控制器,火灾报警联动控制器连接着烟雾报警器、燃气报警器、手动报警器等多种终端装置,上述终端装置需要安装在建筑中特定位置;火灾联动报警控制器即消防控制器,是火灾自动报警系统的心脏,可实现集中控制,可向检测器供电,并具有用来接收火灾信号并启动火灾报警装置、能通过火警发送装置启动火灾报警信号或通过自动消防灭火控制装置启动自动灭火设备和消防联动控制设备、自动监视系统的正确运行和对特定故障给出声、光报警等功能。
2、当火灾发生时,现有终端设备根据相应的环境参数变化(温度、烟雾粒子浓度),在火灾报警联动控制器上发出声光报警。然后由消防控制室值班人员进行处置,值班人员必须在现场正面查看报警信息,并针对报警信息对设备进行操作。但是,绝大多数的火灾联动报警控制器缺乏信息化和智能化能力;而且,因为现有火灾联动报警控制器缺乏扩展和与外部系统进行互联和互操作的能力,这对于消防防控的智能化造成严重的阻碍。
3、因此,现有技术存在缺陷与不足,有待进一步改进和发展。
技术实现思路
1、鉴于现有技术的不足,本技术目的在于提供一种智能消防控制机器人、消防控制器、系统及其方法,旨在解决现有技术中火灾报警联动控制器预警后需要专业人员操作的问题。
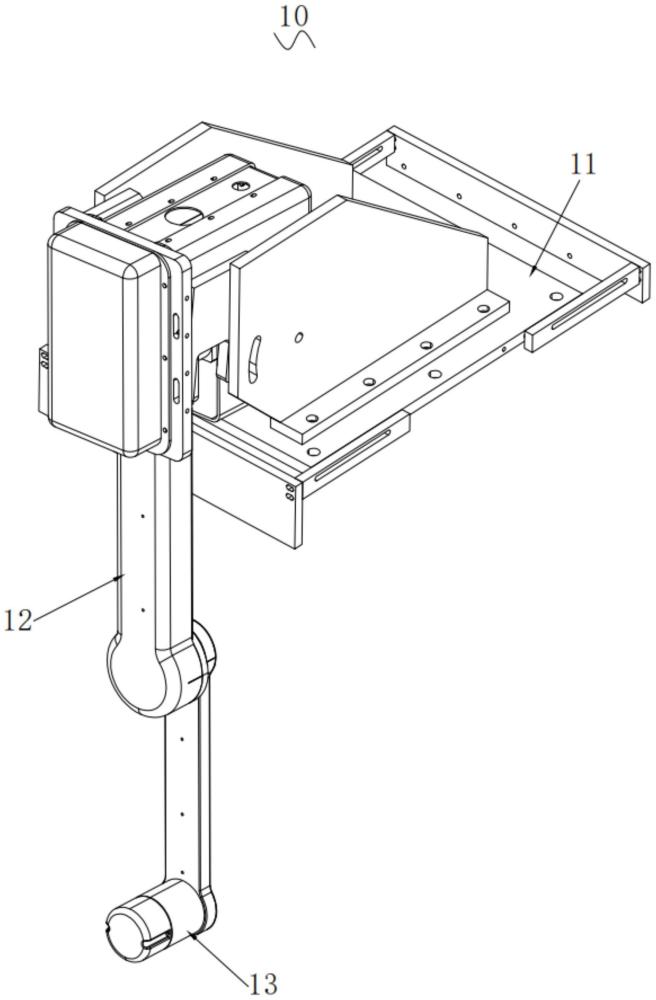
2、本技术解决技术问题所采用的技术方案如下:一种智能消防控制机器人,用于消防控制器,所述智能消防控制机器人包括:
3、底座,所述底座用于连接消防控制器;
4、机械臂,所述机械臂与所述底座铰接;
5、点击组件,所述点击组件连接于所述机械臂背离所述底座的一端处;
6、其中,所述机械臂用于驱动所述点击组件沿第一轴向和第二轴向摆动,以使所述点击组件操控消防控制器,所述点击组件可沿第三轴向摆动。
7、可选地,所述机械臂包括连接板、第一电机和第二电机,所述连接板与所述底座铰接;所述第一电机设置于所述连接板上,用于带动所述第二电机、机械臂和点击组件沿第一轴向和第二轴向摆动;所述第二电机转动连接于所述连接板上,用于带动所述机械臂和点击组件沿第一轴向和第二轴向摆动。
8、可选地,所述机械臂还包括:
9、第一摆动臂,所述第一摆动臂具有相对设置的摆臂第一端和摆臂第二端,所述第二电机设置于所述摆臂第一端上,所述摆臂第一端与所述连接板转动连接,且与所述第一电机传动连接;
10、第二摆动臂,所述第二摆动臂具有相对设置的摆臂第三端和摆臂第四端,所述摆臂第三端与所述摆臂第二端转动连接,所述点击组件设置于所述摆臂第四端处;
11、其中,所述连接板包括依次呈匚字形连接的第一连接侧板、电机连接板和第二连接侧板,所述第一连接侧板和第二连接侧板均与所述底座铰接。
12、可选地,所述底座包括:
13、基板;
14、卡板,所述卡板活动连接于所述基板的一端和/或两端处,用于将基板固定于消防控制器上;
15、第一立板,所述第一立板连接于所述基板上,所述第一立板上设置有第一铰接孔和第一弧形限位孔,所述第一连接侧板与所述第一铰接孔铰接,且所述第一连接侧板与所述第一弧形限位孔滑动连接;
16、第二立板,所述第二立板连接于所述基板上,所述第二立板上设置有第二铰接孔和第二弧形限位孔,所述第二连接侧板与所述第二铰接孔铰接,且所述第二连接侧板与所述第二弧形限位孔滑动连接。
17、可选地,所述点击组件包括:
18、连接管,所述连接管与所述机械臂背离所述底座的一端连接;
19、第三轴向电机,所述第三轴向电机设置于所述连接管背离所述机械臂的一端处;
20、丝杆,所述丝杆的一端与所述第三轴向电机的转动轴连接,且位于所述连接管中;
21、丝套管,所述丝套管与所述丝杆螺接,所述丝套管与所述机械臂沿圆周方向限位连接,且沿丝杆延伸方向滑动连接;
22、柔性点击头,所述柔性点击头连接于所述丝套管背离所述第三轴向电机的一端处。
23、可选地,所述点击组件还包括:
24、传感器,所述传感器设置于所述第三轴向电机上,且伸入所述连接管中;
25、检测挡片,所述检测挡片设置所述丝套管上,所述传感器用于检测所述检测挡片的位置。
26、可选地,所述智能消防控制机器人还包括:
27、人机交互显示器,所述人机交互显示器设置于所述机械臂与所述底座连接处。
28、本技术解决技术问题所采用的又一技术方案如下:一种消防控制器,其包括如上所述的智能消防控制机器人,及控制器本体、控制机构和用户信息传输装置,所述底座设置于所述控制器本体的顶板上,所述控制机构设置于所述控制器本体上,所述机械臂和点击组件延伸至所述控制机构处,所述控制机构包括触控屏和/或控制按钮,所述用户信息传输装置用于连接所述智能消防控制机器人、消防传感器、中控室终端和巡检终端。
29、本技术解决技术问题所采用的又一技术方案如下:一种智能消防控制系统,其包括如上所述的消防控制器,及中控室终端、巡检终端和传感器;所述中控室终端、巡检终端和传感器均与所述用户信息传输装置通讯连接;所述中控室终端与所述巡检终端通讯连接;所述传感器用于设置于消防防控场所中,所述传感器包括烟雾传感器、燃气传感器和手动报警传感器。
30、本技术解决技术问题所采用的又一技术方案如下:一种基于如上所述的智能消防控制系统实现的智能消防控制方法,包括:
31、消防控制器通过传感器获取消防预警信息,并将所述消防预警信息传输至中控室终端;
32、所述中控室终端将接收到的所述消防预警信息传输至巡检终端;
33、所述巡检终端根据接收到的所述消防预警信息,确认并反馈消防预警类型信息至所述中控室终端;
34、所述中控室终端根据接收到的所述消防预警类型信息,确定并传输消防预警处置方案信息至所述消防控制器;
35、所述消防控制器根据接收到的所述消防预警处置方案信息,控制所述智能消防控制机器人运行;
36、所述智能消防控制机器人根据所述消防预警处置方案信息和预存的控制机构上控制按钮的坐标信息,控制机械臂和点击组件操作所述控制机构,直至完成消防预警处置。
37、有益效果:
38、本技术提供了一种智能消防控制机器人、消防控制器、智能消防控制系统及智能消防控制方法,智能消防控制机器人设置有底座、机械臂和点击组件,并设置机械臂与底座铰接,点击组件设置于机械臂背离所底座的一端处;通过底座可以将机械臂和点击组件安装在消防控制器上,进而为点击组件代替专业人员操作消防控制提供了基础保障;通过机械臂沿第一轴向和第二轴向摆动,带动远离底座的点击组件沿第一轴向和第二轴向摆动,同时,点击组件可以沿第三轴向直线伸缩,实现了点击组件的三轴移动,点击组件通过三轴摆动对消防控制器进行操控;通过设置智能消防控制机器人可以减少持有消防中级证书的值班人员数量,在消防控制器预警后,仅通过智能消防控制机器人,即可实现消防预警以及对消防控制器的操作,减少了专业人员的操作,降低了企业的消防成本,提高企业消防的合规管理,促进了消防防控的智能化。
本文地址:https://www.jishuxx.com/zhuanli/20240617/45277.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表