一种智能巡防机器人的制作方法
- 国知局
- 2024-07-05 17:43:27
本技术属于机器人,具体地,涉及一种智能巡防机器人。
背景技术:
1、在学校、小区、景点等人流量较为密集的场所,通常需要通过加装视频监控设备或增派安保人员确保区域的安全性,一旦存在安全隐患或发生安全事件,需要及时排查或处理。此外,当这些场所沿着交通要道设计时,往往还需要在某些时段增加警卫人员对道路进行通行疏导,比如学校上下学期间、城市道路上下班时段、节假日景点人数暴增期间等。
2、为了提高现场的安保效率,部分场所引入了巡防机器人,这些机器人基于视频技术可对事件进行排查,同时也具备一定的语音交互能力,比如当识别到危险事件时会自动发出警报并提示周边人群散去,注意安全等,相较于安保人员的主动发现,巡防机器人的执勤效率显然更高些。
3、然而现有的巡防机器人主要侧重于区域性的安保防护,在道路交通疏导方面的应用较少,且结构简单,人机之间的互动性较差,其他与巡防相关的功能也亟待完善。
技术实现思路
1、针对现有技术中的缺陷,本实用新型提供了一种巡逻效率高,应急防护效果好,用途广泛且造型美观的智能巡防机器人。
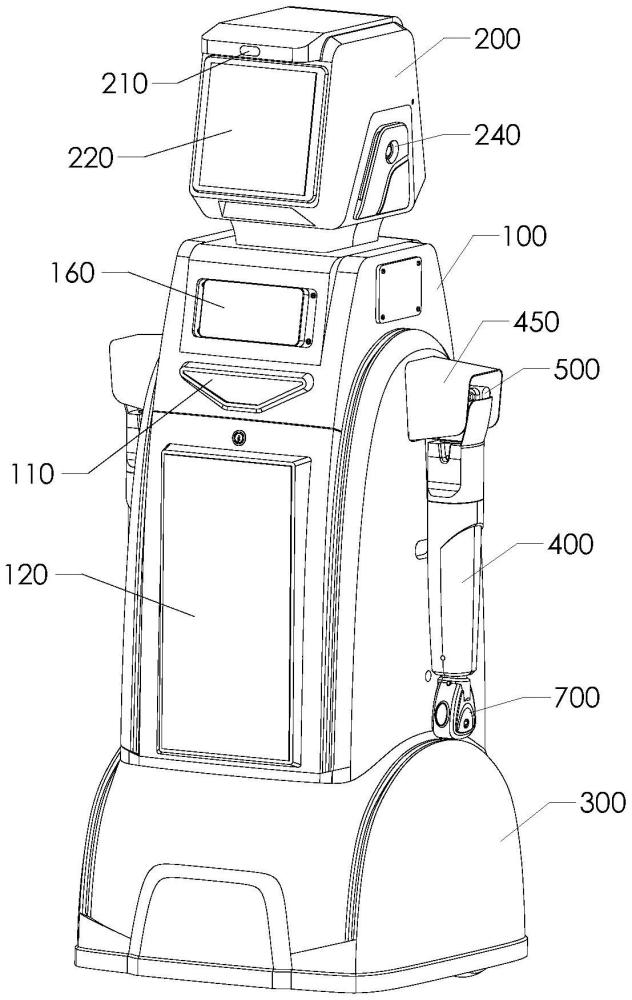
2、本实用新型提供的一种智能巡防机器人,包括机器人本体,机器人本体的顶部设置有头部、底部设置有移动底座,机器人本体的正面和/或背面设置有避障导航模块和第一显示屏,避障导航模块在检测到障碍物时移动底座停止移动;头部的正面设置有人脸检测模块和第二显示屏,人脸检测模块用于检测靠近机器人本体的行人并识别该行人的人脸信息,第二显示屏和第一显示屏用于显示图文信息;机器人本体相对的两侧设置有臂部,臂部通过驱动组件摆动预设角度α;其中:0°≤α≤90°;机器人本体的内部设置有蓄电池,通过蓄电池为避障导航模块、第一显示屏、人脸检测模块、第二显示屏、移动底座和驱动组件供电。
3、可选的,驱动组件包括电动推杆、连接板和l型连接件,电动推杆横向设置于机器人本体内,且电动推杆的一端与机器人本体内的骨架固定连接、另一端具有可伸缩的推杆,连接板的一侧与骨架固定连接、另一侧设置有至少一个耳板,l型连接件的一端与推杆铰接、另一端与耳板铰接;臂部包括第一连接臂,第一连接臂的其中一端与l型连接件的底部固定连接,从而当推杆为伸展状态时,第一连接臂垂放于机器人本体的侧面。
4、可选的,第一连接臂为中空结构,臂部还包括第二连接臂,第二连接臂容置于第一连接臂内,且第二连接臂相对于第一连接臂轴向移动。
5、可选的,第二连接臂内设置有至少一个v型弹性件,v型弹性件的至少一端设置有凸起,第一连接臂上设置有至少一个与凸起相适配的第一限位孔,第二连接臂上设置有与第一限位孔对应的第二限位孔,当凸起卡接于第一限位孔和第二限位孔内时,第二连接臂限位于第一连接臂内。
6、可选的,第一连接臂远离l型连接件的一端内侧设置有第一端盖,第二连接臂靠近l型连接件的一端外侧设置有第二端盖,从而通过第一端盖使第二端盖限位于第一连接臂内。
7、可选的,该机器人还包括手部,手部位于臂部外,且手部与第二连接臂的端部固定连接。
8、可选的,臂部还包括臂壳,臂壳套设于第一连接臂外并与第一连接臂固定连接。
9、可选的,臂部还包括遮罩,遮罩设置于机器人本体的肩部,用于遮盖驱动组件。
10、可选的,该机器人还包括第一语音喇叭,第一语音喇叭与机器人本体内的骨架固定连接。
11、可选的,该机器人还包括第二语音喇叭,第二语音喇叭的握把容置于托架内,托架可拆卸固定于头部的背面。
12、本实用新型相比现有技术,至少具有如下有益效果:
13、1、本实用新型的智能巡防机器人通过设置避障导航模块、人脸检测模块以及显示屏,既可精准实现避障行走功能,亦可在突发事件下进行取证和追溯,从而有效提高交管部门的工作效率。
14、2、本实用新型的智能巡防机器人通过摆动结构实现臂部在预设角度范围内的自由摆动,并通过机器人之间的配合可实现多种形式的拦截结构,在区域性防护、通行分流等方面均具有很好的使用效果,从多方面扩展了机器人的使用场景。
15、3、本实用新型的智能巡防机器人集图片、文字、语音、灯光等多种警示方式于一体,可实现在突发事件下的有效预警提醒,且随着机器人的移动可形成动态隔离预警,相较于传统的警示灯和警示牌,预警提醒效果更全面。
16、4、本实用新型的智能巡防机器人整体结构简约美观,功能全面,内部容量大,可实现多零件收纳,外部空间资源占用少,且操作简单方便,满足学校、小区、景点等场所的使用需求。
技术特征:1.一种智能巡防机器人,包括机器人本体(100),所述机器人本体(100)的顶部设置有头部(200)、底部设置有移动底座(300),其特征在于,所述机器人本体(100)的正面和/或背面设置有避障导航模块(110)和第一显示屏(120),所述避障导航模块(110)在检测到障碍物时所述移动底座(300)停止移动;
2.根据权利要求1所述的智能巡防机器人,其特征在于,所述驱动组件(500)包括电动推杆(510)、连接板(520)和l型连接件(530),所述电动推杆(510)横向设置于所述机器人本体(100)内,且所述电动推杆(510)的一端与所述机器人本体(100)内的骨架(130)固定连接、另一端具有可伸缩的推杆(511),所述连接板(520)的一侧与所述骨架(130)固定连接、另一侧设置有至少一个耳板(540),所述l型连接件(520)的一端与所述推杆(511)铰接、另一端与所述耳板(540)铰接;
3.根据权利要求2所述的智能巡防机器人,其特征在于,所述第一连接臂(410)为中空结构,所述臂部(400)还包括第二连接臂(420),所述第二连接臂(420)容置于所述第一连接臂(410)内,且所述第二连接臂(420)相对于所述第一连接臂(410)轴向移动。
4.根据权利要求3所述的智能巡防机器人,其特征在于,所述第二连接臂(420)内设置有至少一个v型弹性件(430),所述v型弹性件(430)的至少一端设置有凸起(431),所述第一连接臂(410)上设置有至少一个与所述凸起(431)相适配的第一限位孔(411),所述第二连接臂(420)上设置有与所述第一限位孔(411)对应的第二限位孔(421),当所述凸起(431)卡接于所述第一限位孔(411)和所述第二限位孔(421)内时,所述第二连接臂(420)限位于所述第一连接臂(410)内。
5.根据权利要求3所述的智能巡防机器人,其特征在于,所述第一连接臂(410)远离l型连接件(530)的一端内侧设置有第一端盖(412),所述第二连接臂(420)靠近l型连接件(530)的一端外侧设置有第二端盖(422),从而通过所述第一端盖(412)使所述第二端盖(422)限位于所述第一连接臂(410)内。
6.根据权利要求3所述的智能巡防机器人,其特征在于,该机器人还包括手部(700),所述手部(700)位于所述臂部(400)外,且所述手部(700)与所述第二连接臂(420)的端部固定连接。
7.根据权利要求2所述的智能巡防机器人,其特征在于,所述臂部(400)还包括臂壳(440),所述臂壳(440)套设于所述第一连接臂(410)外并与所述第一连接臂(410)固定连接。
8.根据权利要求2所述的智能巡防机器人,其特征在于,所述臂部(400)还包括遮罩(450),所述遮罩(450)设置于所述机器人本体(100)的肩部,用于遮盖所述驱动组件(500)。
9.根据权利要求1所述的智能巡防机器人,其特征在于,该机器人还包括第一语音喇叭(140),所述第一语音喇叭(140)与所述机器人本体(100)内的骨架(130)固定连接。
10.根据权利要求1所述的智能巡防机器人,其特征在于,该机器人还包括第二语音喇叭(150),所述第二语音喇叭(150)的握把(151)容置于托架(230)内,所述托架(230)可拆卸固定于所述头部(200)的背面。
技术总结本技术公开了一种智能巡防机器人,包括机器人本体,机器人本体的顶部设置有头部、底部设置有移动底座,机器人本体的正面和/或背面设置有避障导航模块和第一显示屏,避障导航模块在检测到障碍物时移动底座停止移动;头部的正面设置有人脸检测模块和第二显示屏,人脸检测模块用于检测靠近机器人本体的行人并识别该行人的人脸信息,第二显示屏和第一显示屏用于显示图文信息;机器人本体相对的两侧设置有臂部,臂部通过驱动组件摆动预设角度。本技术既可精准实现避障行走功能,亦可在突发事件下进行取证和追溯,能够有效提高交管部门的工作效率,满足学校、小区、景点等场所的使用需求。技术研发人员:沈标,王悦骅,黄健辉,徐海黎,顾浩然,马守权,张海军受保护的技术使用者:南通天承光电科技有限公司技术研发日:20231012技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240617/48908.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表