一种桥梁缆索自缠绕维修施工机器人的制作方法
- 国知局
- 2024-07-05 17:54:09
本发明涉及桥梁保养维修,具体为一种桥梁缆索自缠绕维修施工机器人。
背景技术:
1、国内各大城市早期建设完成的桥梁将逐步进入病害高发期,为了防止病害影响大桥结构,需要对大桥进行吊杆体系专项维修及延寿处置。
2、目前维修项目工作内容包括:吊杆上下锚头检查,除锈和防腐,锚头保护罩的除锈及防腐;hdpe护套检查及破损部位热熔修补;吊杆hdpe护套表面缠包pvf带;索导管积水清除及聚氨酯灌浆料填充,减震橡胶块拆除及更换等。其中,吊杆和线缆的hdpe护套修复时需要进行清洗处理伤口,热熔hdpe条,以及进行打磨处理。
3、但是,在吊杆和线缆的伤口位置一般都处于高处,修复时需要人工搭设挂篮或者支架平台进行处理,其存在高空作业风险,且当一些桥梁的一些位置处存在不方便搭设挂篮或者支架平台,架设较为困难,因此为解决以上问题提供一种可以进行高空清洗伤口,进行修补的装置。
技术实现思路
1、本发明的目的在于提供一种桥梁缆索自缠绕维修施工机器人,解决了背景技术中人工搭设挂篮或者支架平台进行处理,其存在高空作业风险和架设较为困难的问题。
2、为了解决上述技术问题,本发明提供如下技术方案:
3、一种桥梁缆索自缠绕维修施工机器人,其包括:
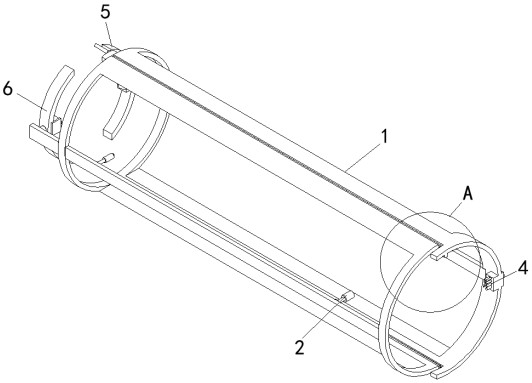
4、筒形架体,其内壁上设有多个径向件,径向件在筒形架体的轴向上呈直线分布,在筒形架体的周向上呈圆形分布;径向件端部设有用于和被维修件多向滚动接触的滚珠;
5、维修工作器安装座,其安装在所述筒形架体轴向上的其中一端;
6、多个维修工作器,其择一地与所述维修工作器安装座连接;
7、轴向驱动件,其安装在所述筒形架体轴向上的另一端,并用于带动筒形架体在被维修件的长度方向上移动;
8、周向驱动件,其与轴向驱动件安装在所述筒形架体的同一端上,并用于带动筒形架体在被维修件的周向上转动。
9、优选的,所述维修工作器包括高压喷头、热熔喷枪和打磨器。
10、优选的,所述轴向驱动件包括第一轴向杆;第一轴向杆和筒形架体的端部连接,第一轴向杆的末端连接所述第一径向杆,第一径向杆远离第一轴向杆的一端连接有与筒形架体同心的第一弧形板;
11、第一弧形板上靠近被维修件的圆弧面上设有第一橡胶滚轮件,第一橡胶滚轮件的转动轴垂直于筒形架体的中心轴,第一橡胶滚轮件连接有第一驱动电机。
12、优选的,所述周向驱动件包括第二轴向杆;第二轴向杆和筒形架体的端部连接,第二轴向杆的末端连接所述第二径向杆,第二径向杆远离第二轴向杆的一端连接有与筒形架体同心的第二弧形板;
13、第二弧形板上靠近被维修件的圆弧面上设有第二橡胶滚轮件,第二橡胶滚轮件的转动轴平行于筒形架体的中心轴,第二橡胶滚轮件连接有第二驱动电机。
14、优选的,所述轴向驱动件和周向驱动件结构相同,且均包括连接件,连接件上设有第三驱动电机,第三驱动电机的输出轴连接有第三橡胶滚轮件,第三橡胶滚轮件连接有第四驱动电机。
15、优选的,所述径向件包括压块,压块内设有容置并限位滚珠的安装槽;压块内还设有与安装槽同轴并不连通的压缩槽,压缩槽内设有弹性件;压块通过弹性件连接有连接柱。
16、优选的,所述筒形架体包括第一半弧形体和第二半弧形体,第一半弧形体和第二半弧形体之间可拆卸连接;
17、所述第一半弧形体和第二半弧形体上均设有镂空部。
18、优选的,所述第一半弧形体上与第二半弧形体接触的侧面上设有轴向卡槽;第一半弧形体其中一端设有径向延伸部,径向延伸部具有和第二半弧形体端部贴合的贴合面;
19、所述第二半弧形体上设有与轴向卡槽卡接的轴向杆,轴向杆远离径向延伸部的一端设有压紧件;压紧件和径向延伸部将第二半弧形体限位在第一半弧形体上,并形成所述筒形架体。
20、优选的,所述轴向卡槽包括球形部和过槽部;
21、所述轴向杆包括相连接的圆柱部和矩形连接部;圆柱部用于和球形部卡接,矩形连接部穿过过槽部与第二半弧形体连接。
22、优选的,所述压紧件包括压片和压紧螺母,所述圆柱部的轴向长度大于矩形连接部的轴向长度,并且其上设有与压紧螺母螺纹连接的外螺纹。
23、与现有技术相比,本发明所达到的有益效果是:
24、1、在需要维修时,将筒形架体设置在被维修件上,被维修件可以是具有pe护套的桥梁吊杆或者拉索,然后可以通过轴向驱动件在长度方向上移动,周向驱动件在被维修件的周向上转动。在长度方向或者轴向上移动时,由于滚珠的存在,使得筒形架体可以进行多向随之运动;不需要另外的驱动结构,另外,在进行不同的操作时,例如清洗、热熔和打磨时,可以选取不同的装置,安装在维修工作器安装座,进行对应工序的操作。以上的结构使得在轴向和周向工作时,筒形架体不需要额外的运动切换装置,来完成两种不同方式的运动,并且不需要搭设挂篮和架设平台,可以避免人的高空操作,减少作业风险。
25、2、筒形架体包括第一半弧形体和第二半弧形体,第一半弧形体和第二半弧形体之间可拆卸连接;第一半弧形体和第二半弧形体上均设有镂空部。
26、3、轴向杆包括相连接的圆柱部和矩形连接部;圆柱部用于和球形部卡接,矩形连接部穿过过槽部与第二半弧形体连接,实现在卡接时,可以进行导向。
27、4、径向件包括压块,压块内设有容置并限位滚珠的安装槽;压块内还设有与安装槽同轴并不连通的压缩槽,压缩槽内设有弹性件;压块通过弹性件连接有连接柱。这样的设置,使得径向件有一个动态适应的过程,如果是一个硬性的状态,那么在被维修件不同位置粗细不一时,还需要进行另外的调节,这样实现了自适应的调节,另外伤口部位存在凹陷,如果没有可以自动的弹性功能,就会出现卡滞的情况,筒形架体难以进行轴向和周向移动。进一步的,筒形架体的中间部分可以用弹性材料进行替换,从而适应被维修件是一个弯曲弯折的状况,避免只能够适应直线型的被维修件的状况。
技术特征:1.一种桥梁缆索自缠绕维修施工机器人,其特征在于,其包括:
2.根据权利要求1所述的一种桥梁缆索自缠绕维修施工机器人,其特征在于:所述维修工作器包括高压喷头、热熔喷枪和打磨器。
3.根据权利要求1所述的一种桥梁缆索自缠绕维修施工机器人,其特征在于:
4.根据权利要求1所述的一种桥梁缆索自缠绕维修施工机器人,其特征在于:
5.根据权利要求1所述的一种桥梁缆索自缠绕维修施工机器人,其特征在于:
6.根据权利要求1所述的一种桥梁缆索自缠绕维修施工机器人,其特征在于:
7.根据权利要求1所述的一种桥梁缆索自缠绕维修施工机器人,其特征在于:
8.根据权利要求7所述的一种桥梁缆索自缠绕维修施工机器人,其特征在于:
9.根据权利要求8所述的一种桥梁缆索自缠绕维修施工机器人,其特征在于:
10.根据权利要求9所述的一种桥梁缆索自缠绕维修施工机器人,其特征在于:所述压紧件(104)包括压片和压紧螺母,所述圆柱部的轴向长度大于矩形连接部的轴向长度,并且其上设有与压紧螺母螺纹连接的外螺纹。
技术总结本发明涉及桥梁保养维修技术领域,且公开了一种桥梁缆索自缠绕维修施工机器人,在需要维修时,将筒形架体设置在被维修件上,被维修件可以是具有PE护套的桥梁吊杆或者拉索,然后可以通过轴向驱动件在长度方向上移动,周向驱动件在被维修件的周向上转动。在长度方向或者轴向上移动时,由于滚珠的存在,使得筒形架体可以进行多向随之运动;不需要另外的驱动结构,在进行不同的操作时,可以选取不同的装置,安装在维修工作器安装座,进行对应工序的操作。以上的结构使得在轴向和周向工作时,筒形架体不需要额外的运动切换装置,来完成两种不同方式的运动,并且不需要搭设挂篮和架设平台,可以避免人的高空操作,减少作业风险。技术研发人员:宋神友,林阳子,陈越,周波,童俊豪,官幼平,金志坚,满建宁,姜凡受保护的技术使用者:广州市开博桥梁工程有限公司技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/49572.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。