一种多功能仿生蟑螂机器人
- 国知局
- 2024-07-08 10:43:58
本发明属于生物仿生,具体涉及一种多功能仿生蟑螂机器人。
背景技术:
1、在现代科技日益发展的背景下,机器人技术和仿生学得到了广泛的应用。尤其在搜索与营救、军事侦查、农业检测等多个领域,小型、多功能的机器人设备受到了广泛关注。然而,大多数现有的机器人在复杂环境下的适应性和灵活性方面仍存在不少局限。
2、传统机器人通常是为特定任务和环境而设计的,难以适应不断变化的外部条件,例如,大多数机器人或者只能在陆地上移动,或者只适用于空中飞行,缺乏多模态行动能力。此外,在环境探测方面,大多数机器人也仅仅依赖于单一的传感器或者定位系统。
3、另一方面,现有的集群机器人系统大多数也存在局限性,例如在协同行动、路径规划和数据融合方面仍然依赖于高度复杂的算法和庞大的计算资源。
4、因此,开发一种小型、高度适应性强、多功能集成、能在复杂环境中有效运作的机器人系统具有重要的实用价值。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了一种多功能仿生蟑螂机器人。本发明要解决的技术问题通过以下技术方案实现:
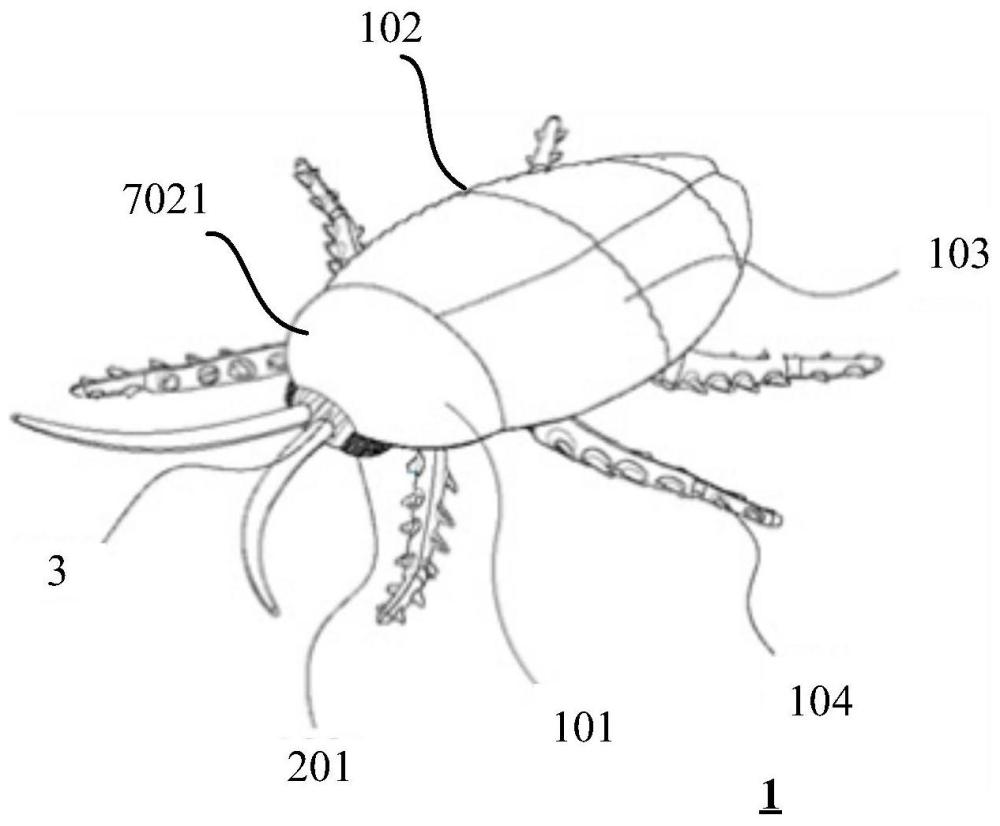
2、本发明提供了一种多功能仿生蟑螂机器人,包括蟑螂主体结构、视觉模块、红外热成像模块、定位模块、集群协同模块、远程操控与连接模块以及多模态行动模块,其中,
3、所述蟑螂主体结构包括头部、躯干部、翅膀和多关节腿部结构;所述视觉模块和所述红外热成像模块设置在所述头部,所述定位模块、所述集群协同模块、所述远程操控与连接模块和所述多模态行动模块设置在所述躯干部;
4、所述视觉模块用于捕捉视频图像;所述红外热成像模块用于通过红外热成像捕获环境中的温度分布图像;所述定位模块用于实时获取所述仿生蟑螂机器人的地理位置信息;所述集群协同模块用于根据预设的行动路线和分组策略,控制当前仿生蟑螂机器人与其他仿生蟑螂机器人进行集群行动;所述远程操控与连接模块用于通过无线方式连接所述仿生蟑螂机器人与操作者终端,并接收所述操作者终端发送的指令以实现远程操控;所述多模态行动模块用于使所述仿生蟑螂机器人的行动模拟真实蟑螂,具有飞行能力、滑翔能力以及爬行能力。
5、与现有技术相比,本发明的有益效果有:
6、1、本发明的多功能仿生蟑螂机器人能够进行实时视觉和红外热成像,进行高精度定位,并且可以与其他仿生蟑螂机器人进行高效的集群协同工作;同时还可以通过无线方式与操作者终端进行连接,实现远程操控和数据交换。
7、2、本发明的多功能仿生蟑螂机器人通过结构化设计和特殊材料的应用,能够实现陆地爬行、飞行和滑翔等多种行动模式,具有出色的适应性和灵活性,结合摄像头和红外热成像模块,能在多种环境下进行高精度的实时感知,从而更有效地完成任务。
8、3、本发明的多功能仿生蟑螂机器人通过内嵌的定位模块,能够实时获取并反馈仿生蟑螂机器人的地理位置信息,有助于精准导航和任务执行,采用先进的分布式算法,即通过多个仿生蟑螂机器人之间的分布式协作和通信,共同完成某个任务或解决某个问题,通过交换信息、共享资源和合作决策来实现目标,增加了在复杂任务和环境中的作战或应用能力。
9、以下将结合附图及实施例对本发明做进一步详细说明。
技术特征:1.一种多功能仿生蟑螂机器人,其特征在于,包括蟑螂主体结构(1)、视觉模块(2)、红外热成像模块(3)、定位模块(4)、集群协同模块(5)、远程操控与连接模块(6)以及多模态行动模块(7),其中,
2.根据权利要求1所述的多功能仿生蟑螂机器人,其特征在于,所述视觉模块(2)包括摄像头(201)、分辨率调整子模块(202)、目标追踪子模块(203)、夜视功能子模块(204)、视场角调整子模块(205)、多摄像头协同子模块(206)、实时图像传输子模块(207)和第一交互子模块(208),其中,
3.根据权利要求1所述的多功能仿生蟑螂机器人,其特征在于,所述定位模块(4)包括实时位置跟踪子模块(401)、历史轨迹记录子模块(402)、地理围栏子模块(403)、定位精度调整子模块(404)、第二交互子模块(405)和第三交互子模块(406),其中,
4.根据权利要求1所述的多功能仿生蟑螂机器人,其特征在于,所述远程操控与连接模块(6)包括安全连接子模块(601)、多终端支持子模块(602)、指令解析子模块(603)、实时反馈子模块(604)、第四交互子模块(605)和任务自动化子模块(606),其中,
5.根据权利要求4所述的多功能仿生蟑螂机器人,其特征在于,所述指令解析子模块(603)具体包括文本指令解析单元(6031)、图像与图形界面解析单元(6032)、条件判断与逻辑指令解析单元(6033)和交互解析单元(6034),其中,
6.根据权利要求5所述的多功能仿生蟑螂机器人,其特征在于,所述集群协同模块(5)包括无线通信子模块(501)、分布式算法子模块(502)、路径规划算法子模块(503)、动态分组策略子模块(504)和任务分发与执行监控子模块(505),其中,
7.根据权利要求6所述的多功能仿生蟑螂机器人,其特征在于,所述多模态行动模块(7)包括飞行子模块(701)、滑翔子模块(702)和爬行子模块(703),其中,
8.根据权利要求1所述的多功能仿生蟑螂机器人,其特征在于,所述红外热成像模块(3)为红外传感器,内嵌于所述仿生蟑螂机器人的眼部之内,与所述摄像头(201)并列设置。
9.根据权利要求2所述的多功能仿生蟑螂机器人,其特征在于,还包括环境建模与定位模块,所述环境建模与定位模块包括激光雷达子模块、视觉slam子模块、地形识别子模块和深度感知子模块,其中,
10.根据权利要求1至9中任一项所述的多功能仿生蟑螂机器人,其特征在于,还包括微型能量收集模块,所述微型能量收集模块包括太阳能电池子模块、热能收集子模块、振动发电子模块、环境光收集子模块以及rf能量收集子模块,其中,
技术总结本发明公开了一种多功能仿生蟑螂机器人,包括蟑螂主体结构和设置在蟑螂主体结构上的视觉模块、红外热成像模块、定位模块、集群协同模块、远程操控与连接模块及多模态行动模块,视觉模块用于捕捉视频图像;红外热成像模块用于捕获温度分布图像;定位模块用于实时获取地理位置;集群协同模块用于根据预设的行动路线和分组策略控制仿生蟑螂机器人进行集群行动;远程操控与连接模块用于接收操作者终端发送的指令;多模态行动模块用于使仿生蟑螂机器人的行动模拟真实蟑螂。本发明能够进行实时视觉和红外热成像及高精度定位,与其他仿生蟑螂机器人进行高效的集群协同工作,同时可以通过无线方式与操作者终端进行连接,实现远程操控和数据交换。技术研发人员:王杰铃,吉鹏,刘甜,刘延飞受保护的技术使用者:中国人民解放军火箭军工程大学技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/49975.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表