一种机器人防跌落和滑动的方法和机器人与流程
- 国知局
- 2024-07-08 10:43:56
本发明涉及机器人,尤其涉及防跌落和防滑动的机器人领域。
背景技术:
1、现有技术中,机器人在桌面或地面使用的过程中,如果由于自重不够或与面板接触摩擦力不够的情况下,容易发生跌倒或滑动风险。以康复机器人为例,一般康复机器人利用电动吸盘或普通吸盘实施与桌面或地面的固定,但在使用过程中如果由于吸盘漏气导致固定不稳定会产生机器人设备跌落或滑动的风险造成人员受伤。同时容易造成机器人设备的损坏。
2、因此需要在机器人设备运行过程中对设备状态进行检测,防止机器人设备发生滑动或跌落。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种防止跌落和滑动的机器人。
2、为实现上述目的,本发明提供了一种机器人防跌落和滑动的方法,所述方法包括步骤:
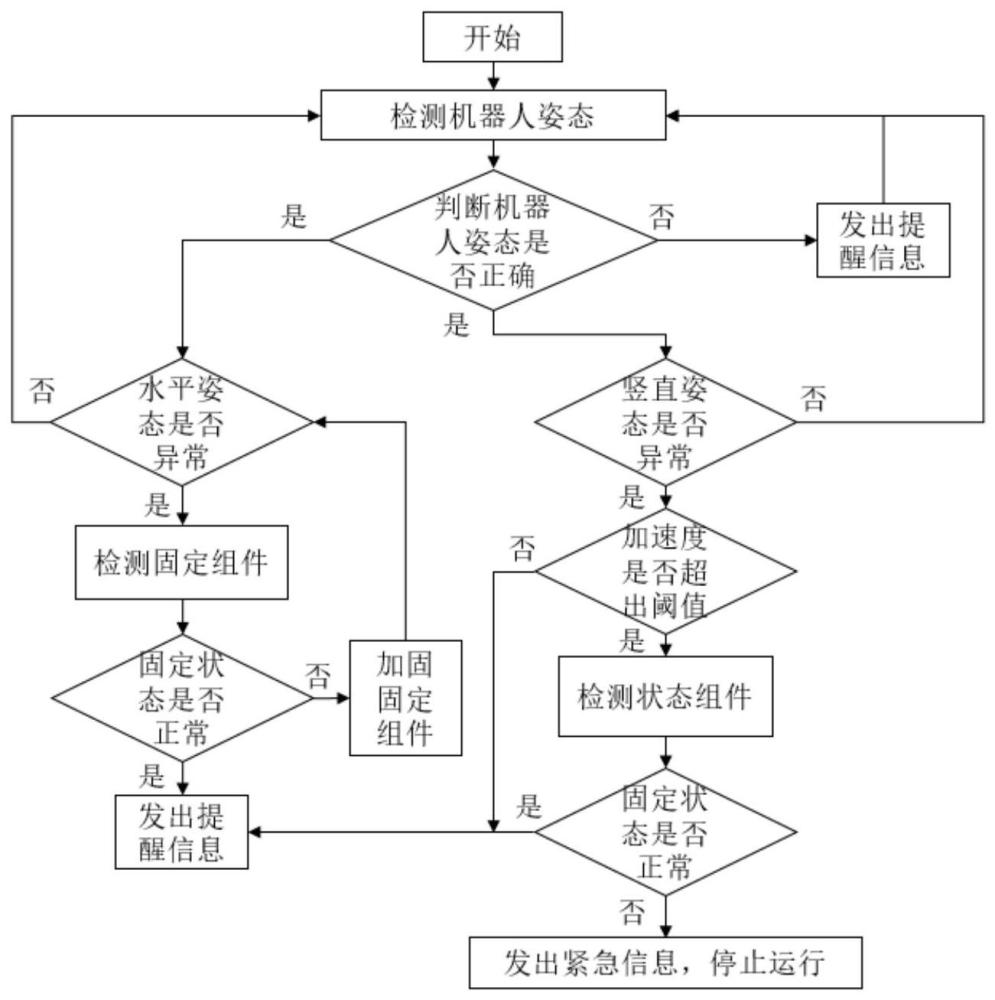
3、s1、检测机器人姿态;
4、s2、判断所述机器人的所述姿态是否处于正确姿态;
5、s3、检测机器人水平姿态是否异常,如果否,则执行步骤s1;如果是,则执行确认滑动步骤;
6、检测机器人竖直姿态是否异常,如果否,则执行步骤s1;如果是,则执行确认跌落步骤。
7、可选的,在所述步骤s1中,通过姿态传感器检测所述机器人姿态。
8、可选的,在所述步骤s2中,包括判断所述机器人的所述姿态是否处于正确姿态,如果是,则执行步骤s3;如果否,则执行步骤s1,并执行发出提醒信息动作。
9、可选的,在所述步骤s2中,所述正确姿态为预先设定的姿态。
10、可选的,所述正确姿态为水平放置所述机器人。
11、可选的,在所述步骤s3中,所述确认滑动步骤为:判断所述机器人的固定组件的固定状态是否正常,如果是,则执行发出提醒信息动作;如果否,则执行所述步骤s3的检测机器人水平姿态是否异常的动作,并执行固定组件加固所述机器人固定的动作。
12、可选的,在所述步骤s3中,所述确认跌落步骤为:判断所述机器人的加速度是否超过阈值,如果否,则执行发出提醒信息动作;如果是,则执行判断所述机器人的固定组件的固定状态是否正常动作。
13、可选的,判断所述机器人的固定组件的固定状态是否正常包括:如果是,则执行发出提醒信息动作;如果否,则执行停止所述机器人运行动作,并执行发出紧急信息动作。
14、可选的,所述发出提醒信息包括通过所述机器人的蜂鸣器发出提醒信息和/或通过通信端发出提醒信息。
15、可选的,所述发出紧急信息包括通过所述机器人的蜂鸣器发出紧急信息和/或通过通信端发出紧急信息。
16、可选的,所述固定组件为吸盘,所述固定状态为吸盘吸紧状态,固定组件加固所述机器人固定为吸盘的气泵固定吸盘。
17、可选的,在所述步骤s3中,检测机器人水平姿态是否异常和检测机器人竖直姿态是否异常同时进行;或先检测机器人水平姿态是否异常,后检测机器人竖直姿态是否异常;或先检测机器人竖直姿态是否异常,后检测机器人水平姿态是否异常。
18、本发明还提供一种机器人,所述机器人采用上述机器人防跌落和滑动的方法控制所述机器人。
19、与现有技术相比,本发明的有益效果是:
20、本发明提供的机器人防跌落和滑动的方法,通过气压传感器、姿态传感器可以有效判断机器人是否处于滑动和/或跌落的状态,并可以避免传感器的误差导致的误报,避免了风险的发生。同时通过双传感器检测和提醒信息可以避免由单传感器误差导致的误报,避免了过度报警和风险。
技术特征:1.一种机器人防跌落和滑动的方法,其特征在于,所述方法包括步骤:
2.根据权利要求1所述的机器人防跌落和滑动的方法,其特征在于,在所述步骤s1中,通过姿态传感器检测所述机器人姿态。
3.根据权利要求2所述的机器人防跌落和滑动的方法,其特征在于,在所述步骤s2中,包括判断所述机器人的所述姿态是否处于正确姿态,如果是,则执行步骤s3;如果否,则执行步骤s1,并执行发出提醒信息动作。
4.根据权利要求1所述的机器人防跌落和滑动的方法,其特征在于,在所述步骤s2中,所述正确姿态为预先设定的姿态。
5.根据权利要求4所述的机器人防跌落和滑动的方法,其特征在于,所述正确姿态为水平放置所述机器人。
6.根据权利要求1所述的机器人防跌落和滑动的方法,其特征在于,在所述步骤s3中,所述确认滑动步骤为:判断所述机器人的固定组件的固定状态是否正常,如果是,则执行发出提醒信息动作;如果否,则执行所述步骤s3的检测机器人水平姿态是否异常的动作,并执行固定组件加固所述机器人固定的动作。
7.根据权利要求1所述的机器人防跌落和滑动的方法,其特征在于,在所述步骤s3中,所述确认跌落步骤为:判断所述机器人的加速度是否超过阈值,如果否,则执行发出提醒信息动作;如果是,则执行判断所述机器人的固定组件的固定状态是否正常动作。
8.根据权利要求7所述的机器人防跌落和滑动的方法,其特征在于,判断所述机器人的固定组件的固定状态是否正常包括:如果是,则执行发出提醒信息动作;如果否,则执行停止所述机器人运行动作,并执行发出紧急信息动作。
9.根据权利要求3、6-8任一所述的机器人防跌落和滑动的方法,其特征在于,所述发出提醒信息包括通过所述机器人的蜂鸣器发出提醒信息和/或通过通信端发出提醒信息。
10.根据权利要求8所述的机器人防跌落和滑动的方法,其特征在于,所述发出紧急信息包括通过所述机器人的蜂鸣器发出紧急信息和/或通过通信端发出紧急信息。
11.根据权利要求6所述的机器人防跌落和滑动的方法,其特征在于,所述固定组件为吸盘,所述固定状态为吸盘吸紧状态,固定组件加固所述机器人固定为吸盘的气泵固定吸盘。
12.根据权利要求1所述的机器人防跌落和滑动的方法,其特征在于,在所述步骤s3中,检测机器人水平姿态是否异常和检测机器人竖直姿态是否异常同时进行;或先检测机器人水平姿态是否异常,后检测机器人竖直姿态是否异常;或先检测机器人竖直姿态是否异常,后检测机器人水平姿态是否异常。
13.一种机器人,其特征在于,所述机器人采用如权利要求1-12任一所述机器人防跌落和滑动的方法控制所述机器人。
技术总结本发明公开了一种机器人防跌落和滑动的方法和机器人,所述方法包括步骤:S1、检测机器人姿态;S2、判断所述机器人的所述姿态是否处于正确姿态;S3、检测机器人水平姿态是否异常,如果否,则执行步骤S1;如果是,则执行确认滑动步骤;检测机器人竖直姿态是否异常,如果否,则执行步骤S1;如果是,则执行确认跌落步骤。本发明通过防跌落和滑动的方法,避免了因机器人跌落和滑动而产生风险的问题。技术研发人员:袁成杰,李希佳,常春阳,师云雷受保护的技术使用者:上海如身机器人科技有限公司技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/49968.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表