一种智能玩具收纳机器人的制作方法
- 国知局
- 2024-07-08 10:43:58
本发明涉及自动化收纳,尤其涉及一种智能玩具收纳机器人。
背景技术:
1、收纳不仅可以让我们的空间显得干净、整洁、有序,还会让我们的空间有变大的感觉,同时当我们要找寻一个需要的物品时也很容易找到。如果没有收纳,我们的空间就会显得杂乱、拥挤、紧张、无序。我们希望孩子自己收纳玩玩具不仅是为了创造整洁的家居环境,更多的是为了培养孩子热爱整洁、讲究卫生、珍惜玩具的好习惯。
2、玩具泛指一类与娱乐和教育功能相关的可以用来玩耍的物品,随着人们生活水平以及教育观念的不断提高,人们越来越重视孩子的教育和智力发展,这样就使得人们对具有娱乐性、教育性和智力开发性玩具的需求不断上升,为了培养孩子智力与身体健康的协同发展,人们基本都会购买如乐高玩具、积木玩具、拼图玩具以及其他各类教育性玩具,随着人们购买玩具的种类和数量的不断上升,玩具的收纳成为了人们较为关注的问题,收纳不仅可以让我们的空间显得干净、整洁、有序,还会让我们的空间有变大的感觉,如果没有收纳,我们的空间就会显得杂乱、拥挤、紧张、无序。我们希望孩子自己收纳玩玩具不仅是为了创造整洁的家居环境,更多的是为了培养孩子热爱整洁、讲究卫生、珍惜玩具的好习惯。
3、目前主要采用家长或孩子人工收纳的方式对玩具进行收纳,这样的收纳方式不仅收纳效率低下而且收纳过程较为繁琐劳累,随着智能化技术的发展,智能机器人作为一类智能化程度较高的机械设备广泛应用在人们日常生产生活的各个领域中,其中,智能玩具收纳机器人则是一类可对玩具进行智能收纳的机器人。
4、现有技术中常见的智能玩具收纳机器人主要由:智能行走组件、抓取单元、视觉检测系统和控制系统几部分组成,其中,智能行走组件主要由底盘、舵机以及行走轮几部分组成,通过舵机控制行走轮移动的方式使智能玩具收纳机器人可以根据需要移动到收纳位置,抓取单元则是一类采用机械臂夹持的方式对玩具进行装夹收纳;视觉检测系统主要通过摄像头等图像采集设备进行图像采集,从而根据视觉检测算法对玩具位置进行检测判断;控制系统根据视觉检测系统的图像采集结果产生智能行走组件和抓取单元的控制信号,从而实现玩具收纳的目的。
5、众所周知,在实际生活中,玩具的种类以及大小是多种多样的,例如:积木类玩具具备数量多、体积小的特定,而遥控汽车等其他玩具的体积较大、数量较小,现有技术中的智能玩具收纳机器人不能根据实际情况对不同尺寸、种类的玩具进行不同方式的收纳,这样就使得智能玩具收纳机器人的收纳效率较低,对玩具进行收纳的效果较差。
技术实现思路
1、发明目的:提出一种智能玩具收纳机器人,以解决现有技术存在的上述问题。
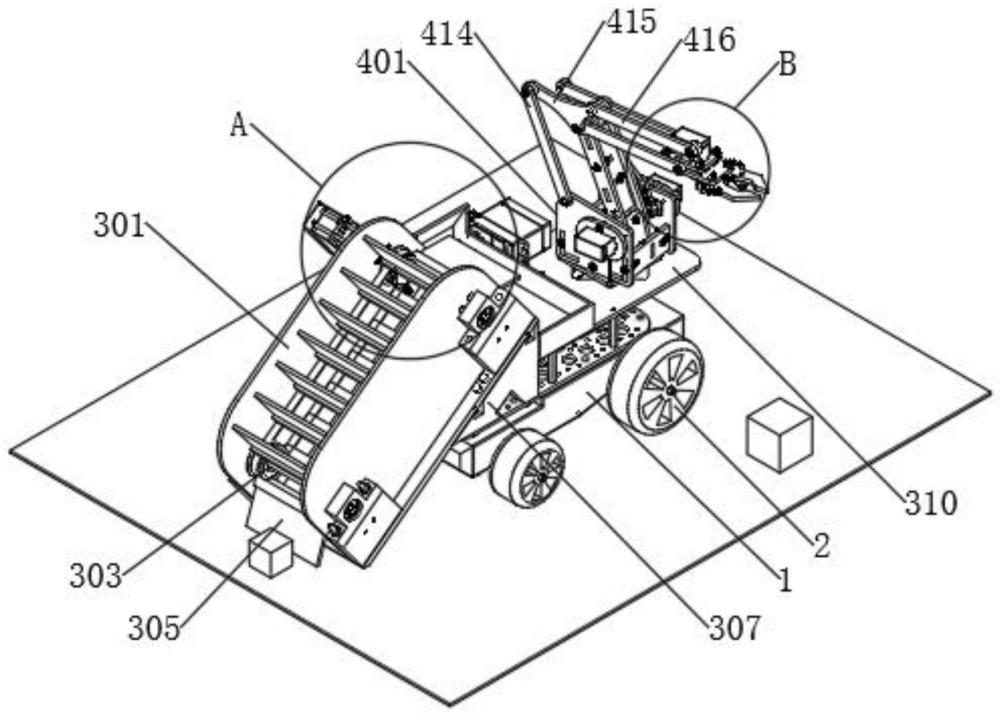
2、第一方面,提出一种智能玩具收纳机器人,该玩具收纳机器人包括行走底盘、一对行走轮、收纳装置、抓取单元。
3、所述行走底盘的底部装配有一对行走轮。
4、所述收纳装置固定装配在行走底盘的上方,所述收纳装置包括清扫装配架,所述清扫装配架固定装配所述行走底盘的上方,所述清扫装配架内转动连接有一对装配转轴,一对所述装配转轴的两侧均固定连接有一对驱动齿轮,一对所述驱动齿轮对称装配在清扫装配架内,一对所述装配转轴之间套设有一对同步齿带,所述同步齿带与驱动齿轮相啮合,且所述同步齿带的外侧固定连接有多组均匀分布的清扫板。
5、所述抓取单元固定装配在清扫装配架的一侧,所述抓取单元包括机械臂座,所述机械臂座转动装配在行走底盘的上方,所述机械臂座内固定安装有固定架,所述固定架的上方铰接有第一关节,所述第一关节的一侧固定连接有第二关节,所述第一关节的上方铰接有第三关节,所述第二关节的上方铰接有第四关节,所述第三关节与第四关节远离第一关节的一端铰接有装夹固定板,所述装夹固定板的下方铰接有一对夹爪,一对所述夹爪相啮合。
6、在本发明的一个或多个实施例中,所述清扫装配架由一块底板和两块侧板组合而成,两块所述侧板对称装配在底板的两侧,且所述侧板所在平面与底板所在平面相垂直。通过底板对两块侧板起到装配固定的作用,通过两块侧板对装配转轴起到装配限位的作用。
7、在本发明的一个或多个实施例中,所述清扫装配架的外侧固定安装有清扫舵机,所述清扫舵机的输出轴与其中一根装配转轴传动连接。清扫舵机起到提供动力的作用,通过控制清扫舵机的运行对装配转轴起到旋转驱动的作用。
8、在本发明的一个或多个实施例中,所述清扫装配架的底部固定连接有一对装配固定板。通过一对装配固定板对清扫装配架进行装配固定。一对所述装配固定板贴近清扫装配架的一侧倾斜设置,且一对所述装配固定板均固定装配在行走底盘的上方。
9、在本发明的一个或多个实施例中,所述装配固定板背离清扫舵机的一侧固定装配有倾斜舵机。倾斜舵机对收纳盒起到装配固定与角度调节控制的作用。所述同步齿带的输出轴固定连接有收纳盒,所述收纳盒与清扫板配合设置。通过收纳盒对多组清扫板移动过程中收集到的小体积玩具进行收纳。所述倾斜舵机的底部固定装配有固定底板,所述固定底板固定装配在行走底盘的上方。固定底板对收纳盒起到装配固定的作用。
10、在本发明的一个或多个实施例中,所述固定底板的下方固定安装有旋转舵机,所述旋转舵机的输出轴与机械臂座传动连接。通过控制旋转舵机的运行对机械臂座起到角度调节控制的作用,从而便于对夹爪进行旋转控制。
11、在本发明的一个或多个实施例中,所述机械臂座的一侧固定安装有第一驱动舵机。通过控制第一驱动舵机的运行对连接驱动杆起到旋转驱动的作用。所述第一驱动舵机输出轴贴近固定架的一端传动有连接驱动杆。连接驱动杆起到连接第五关节与第一驱动舵机输出轴的作用。所述连接驱动杆的一端铰接有第五关节,所述第五关节与第三关节相铰接。通过第五关节对连接驱动杆与第一关节进行连接,从而便通过控制第五关节旋转的方式对第三关节进行牵拉控制。
12、在本发明的一个或多个实施例中,所述机械臂座背离第一驱动舵机的一侧固定安装有第二驱动舵机,所述第二驱动舵机的输出轴与第二关节传动连接。通过控制第二驱动舵机的运行对第六关节进行旋转驱动控制。所述机械臂座的一侧铰接有第六关节,所述第六关节与第二驱动舵机处于机械臂座的同一侧。第六关节对连接拨叉起到装配限位的作用。
13、在本发明的一个或多个实施例中,所述第六关节远离机械臂座的一端铰接有连接拨叉,所述连接拨叉的一端与第四关节相铰接。连接拨叉起到连接第六关节、第七关节与第四关节的作用。所述第四关节的上方装配有第七关节,所述第七关节的一端与连接拨叉相铰接,所述第七关节的另一端铰接有第八关节,且所述第八关节与装夹固定板相铰接。通过第八关节对第四关节进行装配与移动限位。
14、在本发明的一个或多个实施例中,所述装夹固定板的上方固定安装有装夹舵机。通过控制装夹舵机的运行对装夹机械臂进行驱动控制。所述装夹舵机的输出轴传动连接有装夹机械臂。装夹机械臂对装夹舵机起到传动的作用。所述装夹机械臂与其中一个夹爪之间铰接有驱动机械臂。通过驱动机械臂的移动对单个夹爪进行驱动控制,从而便于使得一对夹爪可在啮合作用下进行旋转控制,通过对一对夹爪进行旋转控制的方式对夹爪的装夹状态起到控制作用。
15、在本发明的一个或多个实施例中,提出一种智能玩具收纳机器人的机械臂驱动方法,对于抓取单元的n个关节,每个关节有对应的旋转角度θi(i=1,2,...,n);
16、对于正运动学,构建一个n元方程组来表示末端执行器的位置和姿态,表达式如下:
17、p=f(θ1,θ2,...,θn);
18、对于逆运动学,通过求解所述n元方程组来找到关节角度,表达式如下:
19、θ1,θ2,...,θn=argmin(||p-f(θ1,θ2,...,θn)||);
20、式中,p是末端执行器的位置和姿态,θi是关节角度。
21、与现有技术相比,本发明通过收纳装置和抓取单元的设置,可根据实际玩具种类、大小的不同选择不同的收纳方式,提高了智能玩具收纳机器人的收纳效率,提高了智能玩具收纳机器人的收纳效果。
本文地址:https://www.jishuxx.com/zhuanli/20240617/49976.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种多功能仿生蟑螂机器人
下一篇
返回列表