一种多模态操控的细胞微操作手
- 国知局
- 2024-07-08 10:45:10
本发明涉及压电作动器直接驱动,具体涉及一种多模态操控的细胞微操作手。
背景技术:
1、随着生物医学的高速发展和现代生物研究的不断深入,许多细胞级的操作如细胞捕获、切割、分离及注射等成为了研究热点。虽然目前人类借助显微镜等仪器可以实现对细胞的一系列操作,但是存在人工操作重复性差、专业操作人员培养困难、效率低、只能实现简单操作等问题。因而研制一套高性能的细胞显微操作机器人系统意义重大。微操作手作为显微操作系统与生物细胞连接的关键设备,其设计极其重要。生物细胞尺寸跨度大,从1μm到1mm不等且具有轻、薄、脆等特性,因而对微操作手的性能提出了很高的要求。
2、细胞微操作手主要分为两个部分:驱动部分和传动部分。驱动部分为传动部分提供驱动力,传动部分将驱动部分提供的能量以力或位移的方式施加到生物细胞上。通常驱动源按照能量性质可分为静电、形状记忆合金、电磁、压电四类。传动部分通常采用柔性机构,与传统机械传动机构相比,柔性机构具有无运动间隙、无摩擦、不需要润滑、输入输出呈线性、一体化结构等优点。由于生物细胞的形状通常是不规则的,需要传动部分末端平行运动,以保证夹持的稳定性,同时,为了适应不同的细胞类型,所设计的操作手末端采用模块化设计,能更换不同形面的抓爪。
3、现有的大部分压电驱动微操作手,一般仅能够实现一级或两级位移放大,且无法同时实现夹持和注射两种模式。例如中国专利cn202010390333.5公开的一种结构一体化钳指平动式柔顺机构压电微夹钳,该微夹钳只能实现两级放大,放大倍数小且夹持行程短。有部分微夹钳虽然可以实现三级放大,但是很少能保证末端抓爪平动,例如中国专利cn201710712289.3公开的一种压电驱动式三级位移放大微夹持器,该微夹持器无法保证微夹钳做平动运动,对生物细胞进行操作时稳定性不高。由此可见,设计一种多模态操控且能实现三级放大和平动夹持的细胞微操作手至关重要。
技术实现思路
1、发明目的:本发明的目的是提供一种多模态操控的细胞微操作手采用三级放大机构来克服压电作动器有限的输出,在保证末端平行运动的前提下,实现较大的夹持行程,还可以同时实现夹持和注射两种模式。
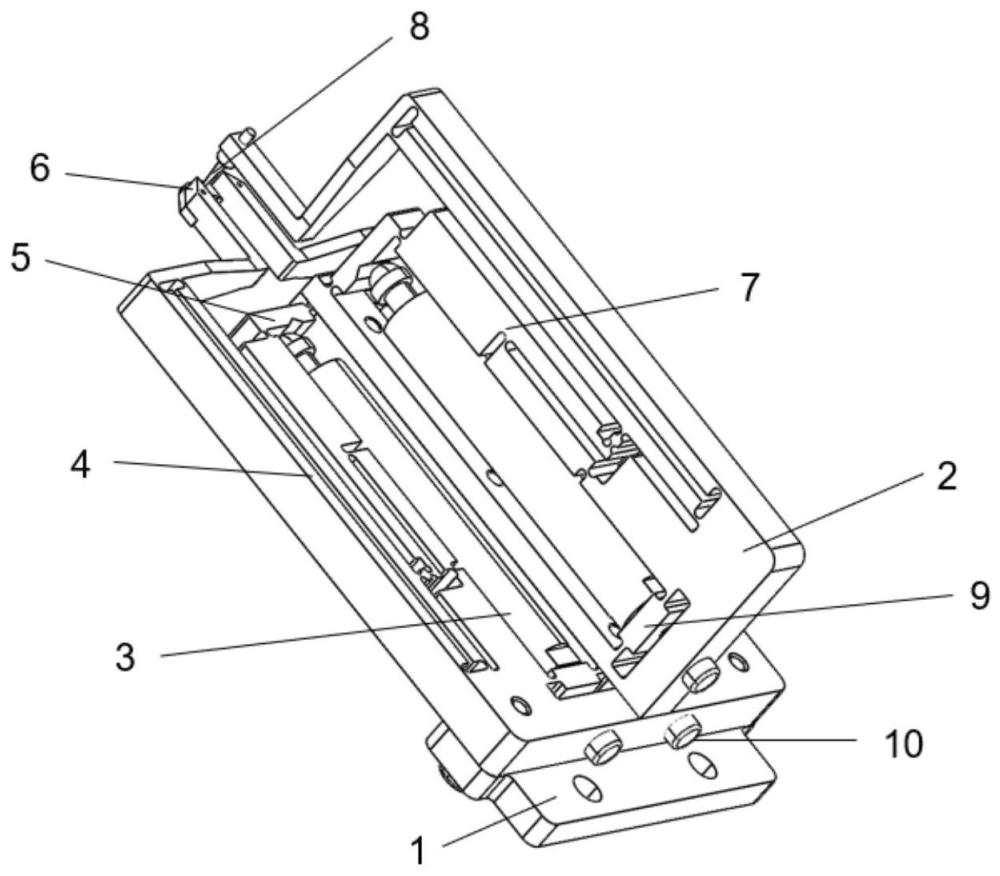
2、技术方案:本发明所述的一种多模态操控的细胞微操作手,包括:连接板、两个基座、三个压电作动器、三个平行四边形机构、三个杠杆机构、抓爪、三个scott-russell机构、注射器、三个预紧横梁和三个预紧螺钉;
3、所述电作动器通过预紧横梁和预紧螺钉安装在微操作手中;所述压电作动器位移输出端位于杠杆机构凹槽中;
4、所述杠杆机构由柔性铰链和一个刚性杆组成,所述杠杆机构通过柔性铰链与基座连接;scott-russell机构由柔性铰链和两个连杆组成;scott-russell机构分别通过上侧的柔性铰链与杠杆机构连接,通过下侧的柔性铰链与基座连接;所述平行四边形机构由柔性铰链与一个刚性杆组成;平行四边形机构分别通过内侧的柔性铰链与scott-russell机构连接,通过下侧的柔性铰链与基座相连;其中,两个平行四边形机构通过上侧的柔性铰链与所述抓爪相连,一个平行四边形机构通过上侧的柔性铰链与所述注射器相连。
5、进一步的,两个基座包括:第一基座、第二基座;所述第一基座上安装有两个压电作动器,设有五个安装孔,所述第二基座上安装有一个压电作动器,设有三个安装孔;第一基座位于第二基座和连接板之间;第二基座与第一基座、连接板的位置关系为垂直关系。
6、进一步的,所述连接板用于固定连接第一基座和第二基座,设有七个安装孔。
7、进一步的,两个基座和连接板通过螺钉相连接。
8、进一步的,所述基座、平行四边形机构、杠杆机构(5)、抓爪(6)、scott-russell机构(7)为一体成型的结构。
9、进一步的,三个scott-russell机构分别与同侧的三个平行四边形机构通过两个柔性铰链连接。
10、进一步的,微操作手为左右对称结构,用于实现热误差补偿。
11、进一步的,所述微操作手为平行夹持。
12、进一步的,采用模块化设计,能更换不同形面的抓爪。
13、进一步的,所述平行四边形机构、杠杆机构、scott-russell机构分别设有五个、一个、四个和个柔性铰链。
14、有益效果:与现有技术相比,本发明具有如下显著优点:可同时实现夹持和注射两种操作模式,具有结构紧凑,刚度大、分辨率高、响应速度快等特点;所设计的各抓手运动分支均采用了三级位移放大机构,其中,第一级为杠杆机构,第二级为scott-russell机构,第三级为平行四边形机构,极大地提高了整个微操作手机构的放大倍数和夹持行程,有效克服了压电作动器输出位移小的不足。此外,平行四边形机构的引入也保证了末端抓爪平行夹持,提高夹持的稳定性;微操作手末端采用模块化设计,可方便更换不同形面的抓爪,提高了微操作手的适应性;操作手集成了力、位置传感器,易于实现力/位混合控制,提高了细胞微操作精度及柔顺性,减小了细胞损伤。
技术特征:1.一种多模态操控的细胞微操作手,其特征在于,包括:连接板(1)、两个基座(2)、三个压电作动器(3)、三个平行四边形机构(4)、三个杠杆机构(5)、抓爪(6)、三个scott-russell机构(7)、注射器(8)、三个预紧横梁(9)和三个预紧螺钉(10);
2.根据权利要求1所述的一种多模态操控的细胞微操作手,其特征在于,两个基座(2)包括:第一基座(2-1)、第二基座(2-2);所述第一基座(2-1)上安装有两个压电作动器(3),设有五个安装孔,所述第二基座(2-2)上安装有一个压电作动器(3),设有三个安装孔;第一基座(2-1)位于第二基座(2-2)和连接板(1)之间;第二基座(2-2)与第一基座(2-1)、连接板(1)的位置关系为垂直关系。
3.根据权利要求1所述的一种多模态操控的细胞微操作手,其特征在于,所述连接板(1)用于固定连接第一基座(2-1)和第二基座(2-2),设有七个安装孔。
4.根据权利要求1所述的一种多模态操控的细胞微操作手,其特征在于,两个基座和连接板通过螺钉相连接。
5.根据权利要求1所述的一种多模态操控的细胞微操作手,其特征在于,所述基座(2)、平行四边形机构(4)、杠杆机构(5)、抓爪(6)、scott-russell机构(7)为一体成型的结构。
6.根据权利要求1所述的一种多模态操控的细胞微操作手,其特征在于三个scott-russell机构(7)分别与同侧的三个平行四边形机构(4)通过两个柔性铰链连接。
7.根据权利要求1所述的一种多模态操控的细胞微操作手,其特征在于,微操作手为左右对称结构,用于实现热误差补偿。
8.根据权利要求1所述的一种多模态操控的细胞微操作手,其特征在于,所述微操作手为平行夹持。
9.根据权利要求1所述的一种多模态操控的细胞微操作手,其特征在于,采用模块化设计,能更换不同形面的抓爪。
10.根据权利要求1所述的一种多模态操控的细胞微操作手,其特征在于,所述平行四边形机构(4)、杠杆机构(5)、scott-russell机构(7)分别设有五个、一个、四个柔性铰链。
技术总结本发明公开了一种多模态操控的细胞微操作手,其特征在于,包括:连接板(1)、两个基座(2)、三个压电作动器(3)、三个平行四边形机构(4)、三个杠杆机构(5)、抓爪(6)、三个Scott‑Russell机构(7)、注射器(8)、三个预紧横梁(9)和三个预紧螺钉(10);本发明可方便更换不同形面的抓爪,提高了微操作手的适应性,提高了细胞微操作精度及柔顺性,减小了细胞损伤。技术研发人员:康升征,卢博研,周陆杨,华德文,杨成都,朱子萌受保护的技术使用者:南京信息工程大学技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/50121.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
锁紧螺母胎具的制作方法
下一篇
返回列表