机械臂运动轨迹的补偿方法、机械臂工作站及存储介质与流程
- 国知局
- 2024-07-08 10:45:09
本发明涉及机械臂,特别涉及一种机械臂运动轨迹的补偿方法、机械臂工作站及存储介质。
背景技术:
1、机械臂的运动轨迹由一个个的点位组成,点位由(x,y,z,rx,ry,rz)表征,其中x,y,z表示坐标,rx,ry,rz表示姿态。
2、在搭建机械臂工作站时,常会遇到因机械臂的安装误差导致运动轨迹发生偏移的问题,如x,y,z方向上的平移偏差导致加工路径发生偏移,加工出来的图形不居中,rx,ry,rz方向上角度偏差导致图形不对称等等,另外,由于待加工对象的材质不同,也有可能导致加工出现位置或姿态偏差。以典型的机械臂咖啡工作站为例:(1)机械臂的安装误差会导致花型不居中,花型不对称、奶缸倾斜变大、倒奶过多过猛等问题;(2)由于咖啡浓缩液和奶泡质地不一样,也将导致咖啡浓缩液与奶泡融合出现问题、液位过满等等问题。
3、一般地,如果要对机械臂的运动轨迹进行调整,需要专业的技术或维修人员上门才能对控制程序进行更改,因此,调整难度较大,如何降低调整难度,让非专业人士也能实现对机械臂手臂的运动轨迹进行微调成了行业内一直亟待解决的问题。
技术实现思路
1、本发明的主要目的是提出一种机械臂运动轨迹的补偿方法,旨在解决现有的机械臂运动轨迹调整难度大的技术问题。
2、为实现上述目的,本发明提出一种机械臂咖啡拉花轨迹的补偿方法,所述机械臂包括第一机械臂和第二机械臂,所述第一机械臂用于握持咖啡杯,所述第二机械臂的末端设置拉花缸,其中,所述机械臂咖啡拉花轨迹的补偿方法包括以下步骤:
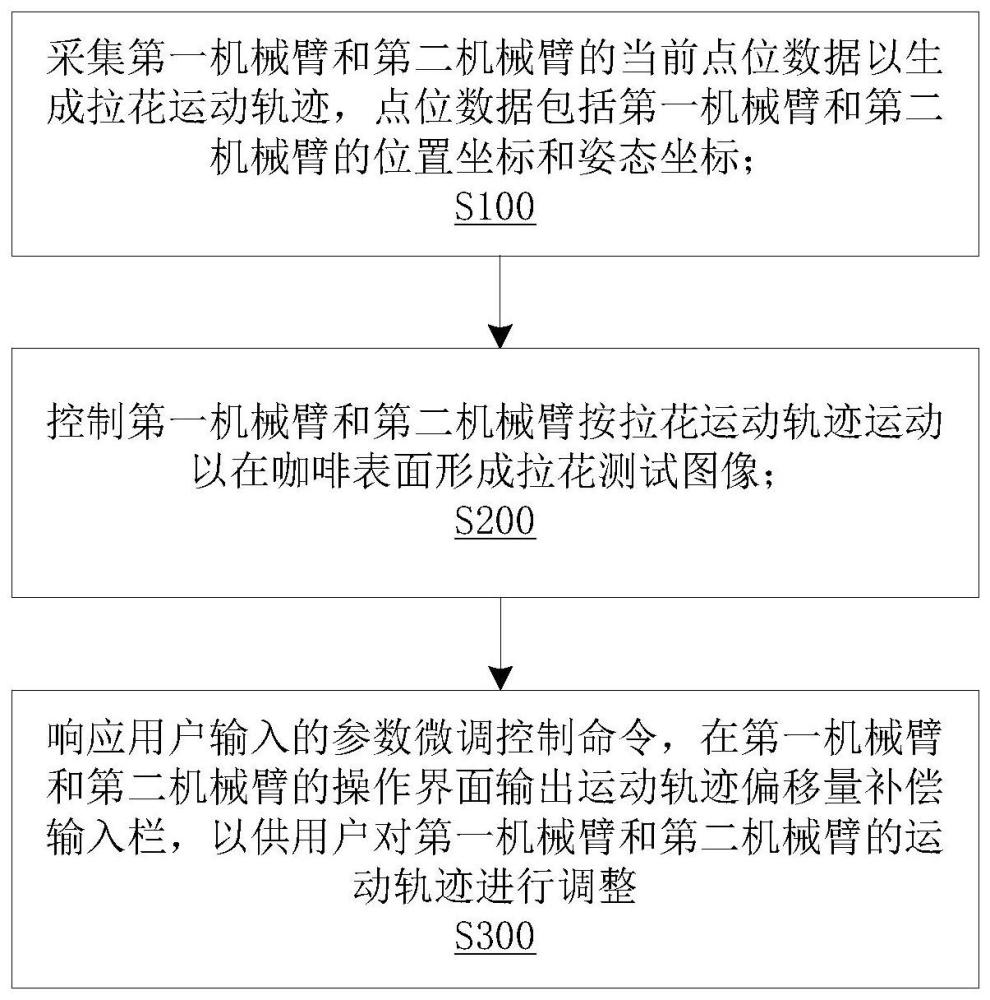
3、采集所述第一机械臂和第二机械臂的当前点位数据以生成拉花运动轨迹,所述点位数据包括第一机械臂和第二机械臂的位置坐标和姿态坐标;
4、控制所述第一机械臂和第二机械臂按所述拉花运动轨迹运动以在咖啡表面形成拉花测试图像;
5、响应用户输入的参数微调控制命令,在所述第一机械臂和第二机械臂的操作界面输出运动轨迹偏移量补偿输入栏,以供用户对第一机械臂和第二机械臂的运动轨迹进行调整。
6、在一些实施例中,所述控制第一机械臂和第二机械臂按所述拉花运动轨迹运动以在咖啡表面形成拉花测试图像包括:
7、控制所述第一机械臂按第一运动轨迹运动,以将所述咖啡杯倾斜至预设角度;
8、控制所述第二机械臂按第二运动轨迹运动,以将拉花缸中的液体倒入咖啡杯,在咖啡表面形成所述拉花测试图像。
9、在一些实施例中,所述响应用户输入的参数微调控制命令,在所述第一机械臂和第二机械臂的操作界面输出运动轨迹偏移量补偿输入栏,以供用户对第一机械臂和第二机械臂的运动轨迹进行调整包括:
10、在操作界面输出所述拉花缸的点位数据偏移量补偿参数输入栏;
11、响应用户输入的点位数据偏移量补偿参数并更新所述拉花缸的运动轨迹。
12、在一些实施例中,所述响应用户输入的参数微调控制命令,在所述第一机械臂和第二机械臂的操作界面输出运动轨迹偏移量补偿输入栏,以供用户对第一机械臂和第二机械臂的运动轨迹进行调整还包括:
13、在操作界面输出所述咖啡杯的摆放角度偏移量补偿参数输入栏;
14、响应用户输入的角度偏移量补偿参数并更新所述咖啡杯的摆放角度。
15、在一些实施例中,所述响应用户输入的参数微调控制命令,在所述第一机械臂和第二机械臂的操作界面输出运动轨迹偏移量补偿输入栏,以供用户对第一机械臂和第二机械臂的运动轨迹进行调整还包括:
16、在操作界面显示所述拉花测试图像并将其与所述第一机械臂和/或第二机械臂的当前点位数据关联;
17、在操作界面输出图像偏移量补偿参数;
18、响应用户输入的图像偏移量补偿参数,并将其转换为所述咖啡杯的摆放角度和/或拉花缸的运动轨迹调整参数。
19、在一些实施例中,所述响应用户输入的图像偏移量补偿参数,并将其转换为所述咖啡杯的摆放角度和/或拉花缸的运动轨迹调整参数包括:
20、响应用户输入的针对花型偏左的图像偏移量补偿参数,控制所述第二机械臂调整y轴坐标数据;
21、响应用户输入的针对花型偏下的图像偏移量补偿参数,控制所述第二机械臂调整x轴坐标数据;
22、响应用户输入的针对液量不满或花型偏大的图像偏移量补偿参数,控制所述第二机械臂调整rx坐标数据;
23、响应用户输入的针对花型不对称的图像偏移量补偿参数,控制所述第二机械臂调整ry坐标数据;
24、其中,所述rx坐标数据与所述ry坐标数据为姿态坐标数据。
25、本发明还提出一种咖啡拉花工作站,该咖啡拉花工作站包括第一机械臂、第二机械臂和控制装置,所述控制装置控制第一机械臂和第二机械臂时,执行如前述的方法步骤。
26、本发明还提出一种计算机可读存储介质,其中,所述计算机可读存储介质存储有计算机可执行的指令,所述计算机可执行的指令被处理器执行时实现如前述的机械臂咖啡拉花轨迹的补偿方法。
27、本发明还提出一种机械臂运动轨迹的补偿方法,包括以下步骤:
28、采集机械臂的当前点位数据以生成运动轨迹,所述点位数据包括所述机械臂的位置信息和姿态信息;
29、控制所述机械臂按所述运动轨迹运动以在待加工对象表面形成测试图像;
30、响应用户输入的参数微调控制命令,在所述机械臂的操作界面输出所述机械臂的运动轨迹偏移量补偿输入栏,以供用户对所述机械臂的运动轨迹进行调整。
31、在一些实施例中,所述机械臂包括第一机械臂和第二机械臂;所述控制机械臂按所述运动轨迹运动以在待加工对象表面形成测试图像包括:
32、控制所述第一机械臂按第一运动轨迹对待加工对象进行定位;
33、控制所述第二机械臂按第二运动轨迹对待加工对象进行加工以形成所述测试图像。
34、在一些实施例中,还包括以下步骤:
35、获取所述测试图像;
36、将所述测试图像与预先存储的标准图像进行比对并输出比对结果。
37、在一些实施例中,所述响应用户输入的参数微调控制命令,在所述机械臂的操作界面输出所述机械臂的运动轨迹偏移量补偿输入栏,以供用户对机械臂的运动轨迹进行调整包括:
38、根据比对结果在操作界面输出所述第一机械臂和/或第二机械臂点位数据的偏移量补偿参数输入栏;
39、响应用户输入的点位数据偏移量补偿参数并更新所述第一机械臂和/或第二机械臂的运动轨迹。
40、在一些实施例中,所述响应用户输入的参数微调控制命令,在所述机械臂的操作界面输出所述机械臂的运动轨迹偏移量补偿输入栏,以供用户对机械臂的运动轨迹进行调整还包括:
41、在操作界面显示所述测试图像并将其与所述第一机械臂和/或第二机械臂的当前点位数据关联;
42、在操作界面输出图像偏移量补偿参数;
43、响应用户输入的图像偏移量补偿参数,并将其转换为所述第一机械臂和/或第二机械臂的点位数据调整参数。
44、本发明还提出一种机械臂工作站,该机械臂工作站包括机械臂和控制装置,所述控制装置控制机械臂时,执行如前述的方法步骤。
45、在一些实施例中,所述机械臂包括第一机械臂和第二机械臂,所述控制装置控制机械臂时,执行如前述的方法步骤。
46、在一些实施例中,所述机械臂工作站还包括图像获取装置,所述图像获取装置用于获取所述测试图像;所述控制装置还用于将所述测试图像与数据库中预先存储的标准图像进行比对并输出比对结果。
47、本发明还提出一种计算机可读存储介质,其中,所述计算机可读存储介质存储有计算机可执行的指令,所述计算机可执行的指令被处理器执行时实现如前所述的机械臂运动轨迹的补偿方法。
48、本发明技术方案首先对机械臂的当前点位数据进行采集并控制其进行运动,从而生成测试图像以供用户判断,如测试图像与标准图像发生偏移,用户可在机械臂的操作界面输入参数微调控制命令,机械臂控制装置响应于该参数微调控制命令,在操作界面输出运动轨迹偏移量补偿输入栏以供用户输入调整参数,从而实现机械臂的运动轨迹微调。本发明方案不但提升了生产过程中机械臂加工的准确性和精度,而且调试操作直观简单,大大降低了售后难度和成本。
本文地址:https://www.jishuxx.com/zhuanli/20240617/50116.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表