一种工业门弹性避让控制方法、装置及其存储介质与流程
- 国知局
- 2024-07-08 10:54:48
本技术涉及工业门控制,尤其是涉及一种工业门弹性避让控制方法、装置及其存储介质。
背景技术:
1、工业门是一种应用场景广泛的设施,主要用于工厂、仓库、停车场、超市等大型商业和工业场所,以及医院、学校、机场等公共场所,通常适用于对于开启速度、保温效果、隔音效果、密封效果、抗风效果等要求比较高的行业。工业门的门帘通常采用加厚双层镀锌彩钢板,内部采用高密度聚氨酯发泡材料填充制作而成,具有隔热、隔音、保温等优点,但同时也会导致门帘的重量较大。在门帘下降的过程中,如果不对其进行相应的防护措施,当有人或物品位于门帘下,可能会被门帘砸伤或夹伤,从而导致危害到人身财产安全。
2、现有技术中的工业门所采取的防护措施通常为设置感应器对门帘接触和挤压到的物体进行感应,当接触或挤压到物体时,及时控制门帘停止下降,然而通过感应器进行感应存在对接触和挤压反应不够灵敏的问题,难以在接触到物体的瞬间准确停止门的运动,从而可能造成安全隐患,影响工业门使用过程中的安全性。
技术实现思路
1、本技术的目的是提供一种工业门弹性避让控制方法、装置及其存储介质,提升工业门避让控制的可靠性。
2、第一方面,本技术提供的一种工业门弹性避让控制方法采用如下的技术方案:
3、一种工业门弹性避让控制方法,包括:
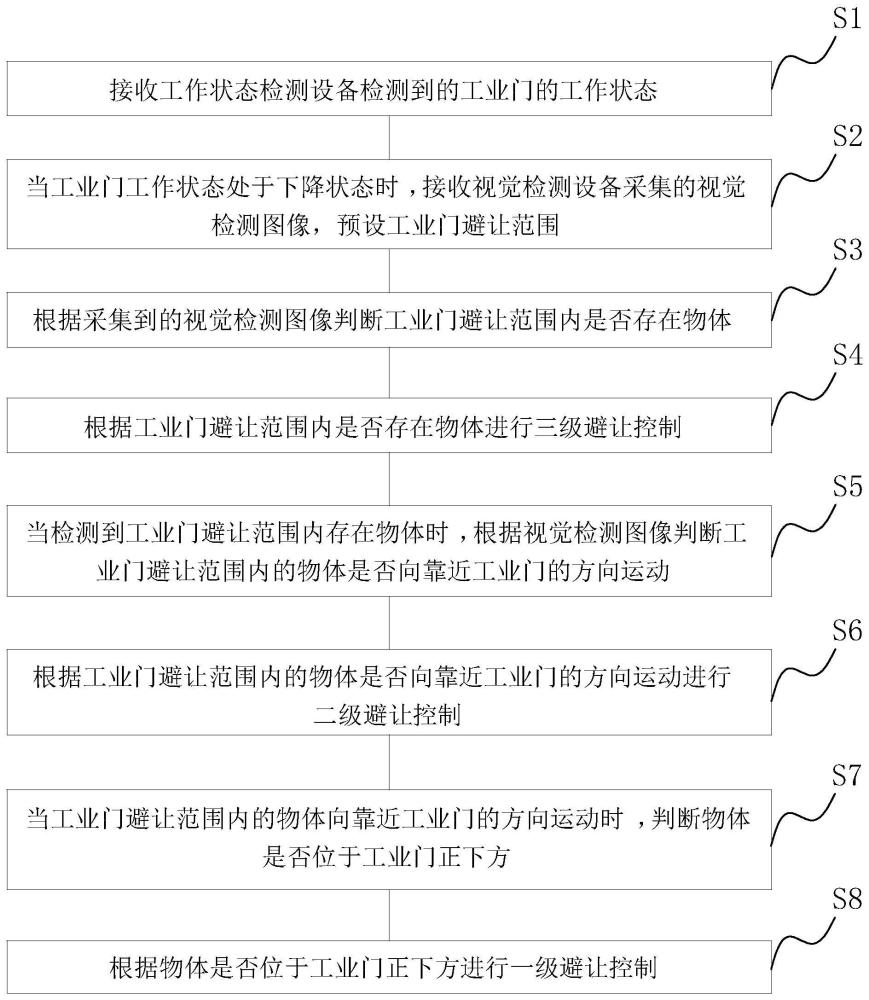
4、接收工作状态检测设备检测到的工业门的工作状态;
5、当工业门工作状态处于下降状态时,接收视觉检测设备采集的视觉检测图像,预设工业门避让范围;
6、根据采集到的视觉检测图像判断工业门避让范围内是否存在物体;
7、根据工业门避让范围内是否存在物体进行三级避让控制;
8、当检测到工业门避让范围内存在物体时,根据视觉检测图像判断工业门避让范围内的物体是否向靠近工业门的方向运动;
9、根据工业门避让范围内的物体是否向靠近工业门的方向运动进行二级避让控制;
10、当工业门避让范围内的物体向靠近工业门的方向运动时,判断物体是否位于工业门正下方;
11、根据物体是否位于工业门正下方进行一级避让控制。
12、通过采用上述技术方案,本技术将工业门的避让控制分为三个等级,从三个不同维度进行工业门的弹性避让,其中,三级避让控制为根据避让范围内是否存在物体进行判断,二级避让控制为根据工业门避让范围内的物体是否向靠近工业门的方向运动进行判断,一级避让控制为根据物体是否位于工业门正下方进行判断。本技术利用了视觉检测方法,通过三个不同等级的避让控制,能够提前对可能产生隐患的情况进行相应的控制措施,实现工业门在下降状态的弹性避让,确保工业门使用过程中的安全性,提升工业门避让控制的可靠性。
13、进一步的,所述根据视觉检测图像判断工业门避让范围内是否存在物体,具体包括:
14、预先构建物体位置检测模型,配置物体位置检测模型的初始模型参数;
15、获取物体位置检测数据库内的视觉检测图像样本和对应的物体位置样本,对视觉检测图像样本进行预处理;
16、将预处理后的视觉检测图像样本和对应的物体位置样本构建为物体位置检测样本集;
17、根据物体位置检测样本集对物体位置检测模型进行训练和测试;
18、根据物体位置检测模型的训练和测试结果调整物体位置检测模型的初始模型参数,得到最终的物体位置检测模型;
19、对采集到的视觉检测图像进行预处理;
20、将预处理后的视觉检测图像输入物体位置检测模型,得到物体位置预测结果;
21、根据物体位置预测结果和工业门避让范围判断工业门避让范围内是否存在物体。
22、通过采用上述技术方案,本技术通过视觉检测的方法判断工业门避让范围内是否存在物体,通过构建物体位置检测模型,并使用物体位置检测数据库内预存的数据对模型进行训练和测试,并在训练和测试过程中不断调节模型参数,以使物体位置检测模型的准确性足够高,从而能够根据预处理后的视觉检测图像得到物体位置预测结果,确保工业门避让范围内是否存在物体判断的准确性,从而确保避让控制的准确性。
23、进一步的,所述根据工业门避让范围内是否存在物体进行三级避让控制,具体包括:
24、当工业门避让范围内不存在物体时,不进行避让控制;
25、当工业门避让范围内存在物体时,生成避让预警信号。
26、通过采用上述技术方案,本技术通过工业门避让范围内是否存在物体进行三级避让控制,由于当工业门避让范围内存在物体时,表明该物体很接近工业门,当工业门处于下降状态时,可能会对物体造成安全隐患,因此需要进行三级避让控制,三级避让控制主要为生成避让预警,以提示在场人员当前存在安全隐患,确保工业门弹性避让的准确性。
27、进一步的,所述当检测到工业门避让范围内存在物体时,根据视觉检测图像判断工业门避让范围内的物体是否向靠近工业门的方向运动,具体包括:
28、根据视觉检测图像提取物体的若干个特征点;
29、根据光流的连续性构建用于描述光流变化的约束方程;
30、将特征点在两个相邻帧的视觉检测图像之间的位置变化构建为光流向量;
31、根据约束方程优化得到该物体的光流场,光流场包括所有特征点的光流向量;
32、根据光流向量的方向得到该物体的运动方向,根据光流向量的大小得到该物体的运动速度;
33、根据该物体的运动方向判断物体是否向靠近工业门的方向运动。
34、通过采用上述技术方案,本技术通过光流估计方法判断物体的运动方向,从而判断工业门避让范围内的物体是否向靠近工业门的方向运动,光流估计方法通常具有较高的计算效率,能够在实时性要求较高的应用中进行运动方向的实时检测和跟踪,并且精度较高,从而确保判断物体的运动方向的准确性较高,确保工业门避让控制的实时性和可靠性。
35、进一步的,所述根据工业门避让范围内的物体是否向靠近工业门的方向运动进行二级避让控制,具体包括:
36、当工业门避让范围内的物体未向靠近工业门的方向运动时,不进行二级避让控制;
37、当工业门避让范围内的物体向靠近工业门的方向运动时,根据该物体的运动速度与预设的运动速度阈值进行二级避让控制。
38、通过采用上述技术方案,本技术根据工业门避让范围内的物体是否向靠近工业门的方向运动进行二级避让控制,当工业门避让范围内的物体向靠近工业门的方向运动,则表明该物体即将进入工业门下方,当工业门下降时,很容易产生隐患,因此需要进行二级避让控制,以确保工业门避让控制的可靠性。
39、进一步的,所述当工业门避让范围内的物体向靠近工业门的方向运动时,根据该物体的运动速度与预设的运动速度阈值进行二级避让控制,具体包括:
40、当该物体的运动速度小于预设的运动速度阈值时,生成工业门减速下降信号;
41、当该物体的运动速度大于预设的运动速度阈值时,生成工业门停止信号。
42、通过采用上述技术方案,本技术通过预设速度阈值,当判断出物体靠近工业门的运动速度小于预设的运动速度阈值时,表明该物体可能还需要一定的时间才会达到工业门正下方,因此控制工业门下降速度减慢,以防止夹伤该物体,当判断出物体靠近工业门的运动速度大于预设的运动速度阈值时,表明该物体的即将达到工业门正下方,因此控制工业门停止下降,以防止夹伤该物体。本技术根据物体靠近工业门的运动速度通过两种不同方式进行二级避让控制,在确保工业门下降工作状态不受影响的同时进行弹性避让,进一步确保工业门避让控制的可靠性。
43、进一步的,所述当工业门避让范围内的物体向靠近工业门的方向运动时,判断物体是否位于工业门正下方,具体包括:
44、接收感应设备感应的工业门正下方的感应信号;
45、根据感应信号判断物体是否位于工业门正下方。
46、通过采用上述技术方案,本技术除了依靠视觉检测图像进行避让控制外,同时结合了感应设备对工业门正下方进行感应,当工业门正下方有物体时,极有可能被下降的工业门夹伤,因此需要进行视觉检测和感应检测的双重保障以确保工业门避让控制的可靠性。
47、进一步的,所述根据物体是否位于工业门正下方进行一级避让控制,具体包括:
48、当物体不位于工业门正下方时,不进行一级避让控制;
49、当物体位于工业门正下方时,生成工业门停止信号。
50、通过采用上述技术方案,本技术根据物体是否位于工业门正下方进行一级避让控制,当感应到有物体在工业门正下方时,及时停止工业门继续下降,由于在二级避让控制中,检测到有物体向工业门方向移动时已经控制工业门减速下降,此时再需要停止工业门可以使工业门立刻并准确停止下降,无需过长的缓冲时间,因此能够确保工业门避让控制的可靠性,进一步保证工业门使用过程中的安全性。
51、第二方面,本技术提供的一种工业门弹性避让控制装置采用如下的技术方案:
52、一种工业门弹性避让控制装置,包括处理器、视觉检测设备和工作状态检测设备,所述视觉检测设备和工作状态检测设备分别与处理器电连接,处理器用于执行第一方面所述的一种工业门弹性避让控制方法;
53、所述工作状态检测设备用于检测工业门的工作状态,并将工业门的工作状态上传至处理器;
54、所述视觉检测设备用于采集视觉检测图像,并将视觉检测图像上传至处理器。
55、通过采用上述技术方案,本技术通过视觉检测设备采集视觉检测图像并上传至处理器,由处理器进行相应的工业门弹性避让控制,确保工业门弹性避让的可靠性,从而确保工业门使用过程中的安全性。
56、第二方面,本技术提供一种计算机可读存储介质采用如下的技术方案:
57、一种计算机可读存储介质,其特征在于,存储有能够被处理器加载并执行如第一方面所述的一种工业门弹性避让控制方法的计算机程序。
58、通过采用上述技术方案,本技术通过处理器接收工业门的工作状态和视觉检测图像,并判断工业门避让范围内是否存在物体、判断工业门避让范围内的物体是否向靠近工业门的方向运动、判断物体是否位于工业门正下方,并自动进行相应的避让控制,以确保工业门弹性避让控制的可靠性和智能性。
59、综上所述,本技术包括以下至少一种有益技术效果:
60、1.本技术利用了视觉检测方法,通过三个不同等级的避让控制,能够提前对可能产生隐患的情况进行相应的控制措施,实现工业门在下降状态的弹性避让,确保工业门使用过程中的安全性;
61、2.本技术通过视觉检测的方法判断工业门避让范围内是否存在物体,通过构建物体位置检测模型,并使用物体位置检测数据库内预存的数据对模型进行训练和测试,并在训练和测试过程中不断调节模型参数,以使物体位置检测模型的准确性足够高,从而能够根据预处理后的视觉检测图像得到物体位置预测结果,确保工业门避让范围内是否存在物体判断的准确性,从而确保避让控制的准确性;
62、3.本技术通过光流估计方法判断物体的运动方向,从而判断工业门避让范围内的物体是否向靠近工业门的方向运动,光流估计方法通常具有较高的计算效率,能够在实时性要求较高的应用中进行运动方向的实时检测和跟踪,并且精度较高,从而确保判断物体的运动方向的准确性较高,确保工业门避让控制的实时性和可靠性;
63、4.本技术根据物体是否位于工业门正下方进行一级避让控制,当感应到有物体在工业门正下方时,及时停止工业门继续下降,由于在二级避让控制中,检测到有物体向工业门方向移动时已经控制工业门减速下降,此时再需要停止工业门可以使工业门立刻并准确停止下降,无需过长的缓冲时间,因此能够确保工业门避让控制的可靠性,进一步保证工业门使用过程中的安全性。
本文地址:https://www.jishuxx.com/zhuanli/20240617/50969.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表