一种基于多层级柔性机构设计的机器人柔性夹持装置
- 国知局
- 2024-07-08 10:55:32
本发明属于机器人领域,具体涉及一种基于多层级柔性机构设计的机器人柔性夹持装置。
背景技术:
1、目前机器人在智能制造、家庭服务及果蔬采摘等领域的应用日益普遍。而在当前的应用环境中,机器人末端执行器需要根据物体的特性,如软硬程度、表面纹理及空间形状等来规划正确的操作动作,以此保证所操作的物体不掉落、不打滑及不破损。
2、机器人末端执行器一般采用两种方式来完成作业,一种是采用模仿人的手部结构的仿生机构,一般具有多个关节、多个自由度,同时也需要多个电机来驱动,以此才能实现复杂的抓取动作,但这种结构过于复杂,伺服控制难度大,制造成本也很高;另一种是采用传统刚性结构的夹持器,主要通过电机或者液压气动机构实现手爪的张开和闭合,但其刚性的接触需要准确控制夹取的力度,对夹持器的控制算法的精度要求比较高,微小错误都很可能对物体造成挤压破坏,并且在夹持质地较硬且光滑的物体时,也时常出现打滑的情况,从而大大降低夹持器的通用性和实用性。另外,若夹持器的刚性太大,一般只能夹持单一形状规则的物品,无法抓取形状不规则的物体,从而存在兼容性差的缺点。故而现阶段生产中,广泛采用的刚性夹持器存在通用性差、制造成本高及柔度不足等问题。通用性差导致需频繁更换夹持器件进行作业,不利于经济性;制造成本高不利于产业化应用;柔度不足导致刚性夹持器易损伤夹持物体,未能满足夹持的要求。
3、目前大多数的二维平面夹持器,夹持物体时为两点接触,难以稳定地夹持不规则形状微小物体。为了实现夹持不规则形状微小物体,需要当夹持物体时为多点接触,所以3维空间的微夹持器能满足这一要求。
4、柔性机构是采用柔性构件的弹性变形传递和转换运动、力或能量的一种新型机构,柔性机构具有免摩擦、免润滑、整体化制造及运动灵敏度高等优点,柔性机构这些优点使得其可适合于夹持器的结构设计,能实现对物体的夹持与操作,并且可以实现空间多维的夹持操作。另外,一体化成型的结构设计免去了装配和零件不定期的磨损更换等一系列的繁琐操作,有利于机器人的良好作业和完成进度。
5、多层级柔性机构是一种客观的设计方法,在包含了柔性机构特有的性质下,以产品的轻量化为目的,通过数值计算,得到了符合形式特征与结构要求的构型设计,应用于产品的轻量化设计,有效降低产品生产的用料和成本。
6、随着社会的发展和工业技术水平的不断进步,夹持装置在自动化流水线中得到广泛应用,同时也朝着灵巧性和柔性性方向发展。它能部分地代替人工操作,能按照生产工艺的要求,遵循一定的程序、时间及位置来抓取工件完成传送。因此,亟需设计一款成本友好、具有良好顺应性的通用机器人柔性夹持器,以顺应夹持器大批量生产的趋势。
技术实现思路
1、本发明为了克服现有技术存在的不足,提供了一种基于多层级柔性机构设计的机器人柔性夹持装置,所述机器人柔性夹持装置可实现对不同大小和形状不规则的夹持物进行自适应抓取,且通用性和实用性强,从而有利于大批量生产。
2、本发明解决上述技术问题的技术方案是:
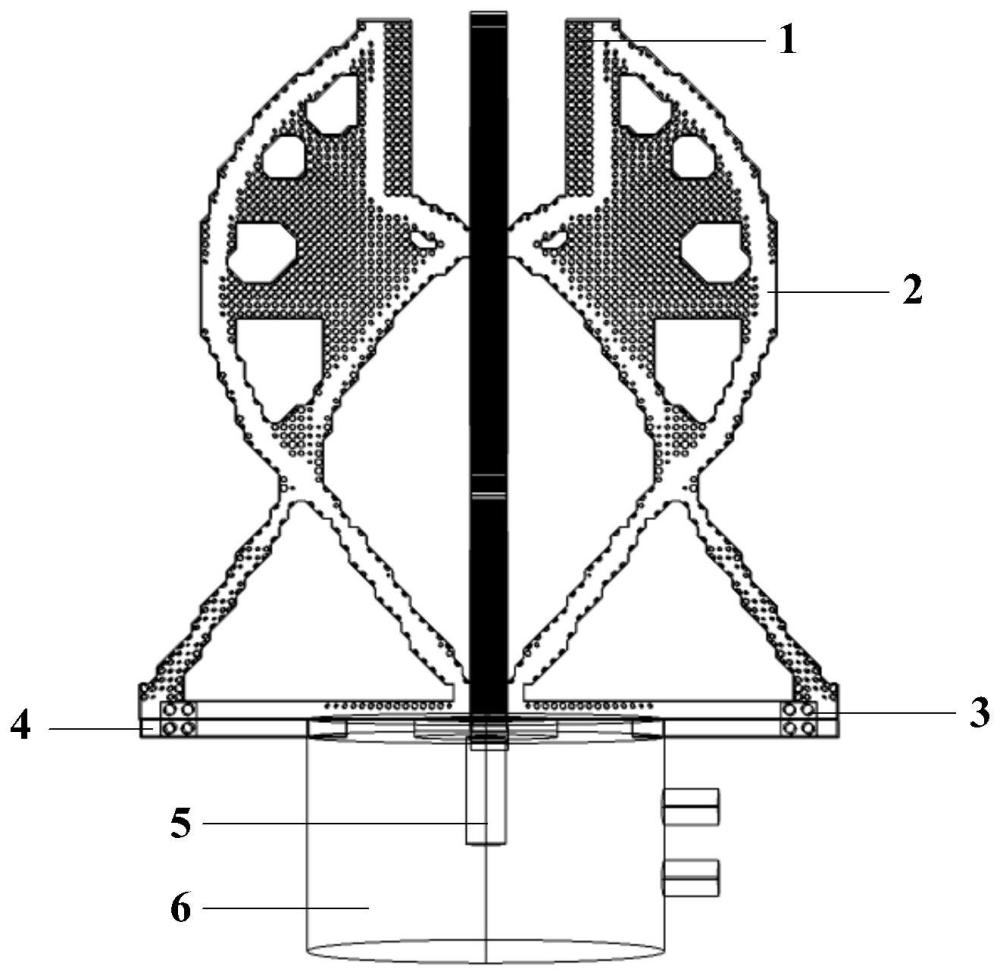
3、一种基于多层级柔性机构设计的机器人柔性夹持装置,包括底座、设置在底座上的多层级柔性爪以及用于驱动所述多层级柔性爪的夹持口做夹持动作的夹持驱动机构,其中,
4、所述多层级柔性爪为多组,多组所述的多层级柔性爪在所述底座上呈圆周排列;每组多层级柔性爪包括对称设置的两个夹持爪,两个夹持爪分别为第一夹持爪和第二夹持爪;其中,所述第一夹持爪和所述第二夹持爪之间通过弹性连接件连接;所述夹持爪上设置有夹持端,所述第一夹持爪和所述第二夹持爪的夹持端构成所述多层级柔性爪的夹持口;
5、所述夹持驱动机构用于驱动所述弹性连接件向下运动,以促使所述第一夹持爪和所述第二夹持爪的夹持端以所述弹性连接件为转动支点做相向转动,以实现夹持动作。
6、优选的,所述夹持端上设置有缓冲层。
7、优选的,所述夹持驱动机构包括直线电机与推杆,其中,所述直线电机安装在电机安装座,该直线电机的主轴与所述推杆的下端连接,所述推杆的上端与所述弹性连接件连接;所述底座上设置有用于避让所述推杆的避让孔。
8、优选的,所述夹持爪的上侧为夹持端,下侧为支撑部,其中,所述支撑部包括第一弹性支脚、第二弹性支脚和弹性连接杆,其中,所述第一弹性支脚位于外侧,而所述第二弹性支脚则位于内侧,所述弹性连接杆的两端分别连接在所述第一弹性支脚和所述第二弹性支脚的底部,以此构成三角形结构;所述第一弹性支脚的顶部和所述第二弹性支脚的顶部相交于所述夹持端的底部;所述弹性连接杆中与所述第一弹性支脚相交的端部固定在所述底座上,该弹性连接杆中与所述第二弹性支脚相交的端部则与滑套连接,所述滑套上设置有避让所述推杆的滑孔。
9、优选的,所述夹持端的外轮廓为弧形,该夹持端上设置有若干个通孔,若干个通孔沿着所述夹持端的外轮廓排列。
10、优选的,所述多层级柔性爪采用tpu材料通过一体化注塑工艺形成。
11、优选的,所述多层级柔性爪为两组,两组多层级柔性爪呈90度设置,两组多层级柔性爪采用tpu材料通过一体化注塑工艺形成。
12、优选的,所述弹性连接件为多组多层级柔性爪中的第一夹持爪和第二夹持爪相交处形成的弹性连接部。
13、优选的,多组多层级柔性爪中的第一夹持爪和第二夹持爪中的弹性连接杆的端部相交以形成所述的滑套。
14、优选的,所述多层级柔性爪为多层级单胞构型结构,所述多层级单胞构型结构采用o形构型。
15、本发明与现有技术相比,具有如下优点和有益效果:
16、1、本发明的基于多层级柔性机构设计的机器人柔性夹持装置可实现对不同大小和形状不规则的夹持物进行自适应抓取,且通用性和实用性强,从而有利于大批量生产。
17、2、本发明的基于多层级柔性机构设计的机器人柔性夹持装置采用的是多组呈圆周排列的多层级柔性爪的互相垂直的空间对称结构,具有结构紧凑、受力均匀、抓取物体的适用范围广的特点。
技术特征:1.一种基于多层级柔性机构设计的机器人柔性夹持装置,其特征在于,包括底座、设置在底座上的多层级柔性爪以及用于驱动所述多层级柔性爪的夹持口做夹持动作的夹持驱动机构,其中,
2.根据权利要求1所述的基于多层级柔性机构设计的机器人柔性夹持装置,其特征在于,所述夹持端上设置有缓冲层。
3.根据权利要求1所述的基于多层级柔性机构设计的机器人柔性夹持装置,其特征在于,所述夹持驱动机构包括直线电机与推杆,其中,所述直线电机安装在电机安装座,该直线电机的主轴与所述推杆的下端连接,所述推杆的上端与所述弹性连接件连接;所述底座上设置有用于避让所述推杆的避让孔。
4.根据权利要求1所述的基于多层级柔性机构设计的机器人柔性夹持装置,其特征在于,所述夹持爪的上侧为夹持端,下侧为支撑部,其中,所述支撑部包括第一弹性支脚、第二弹性支脚和弹性连接杆,其中,所述第一弹性支脚位于外侧,而所述第二弹性支脚则位于内侧,所述弹性连接杆的两端分别连接在所述第一弹性支脚和所述第二弹性支脚的底部,以此构成三角形结构;所述第一弹性支脚的顶部和所述第二弹性支脚的顶部相交于所述夹持端的底部;所述弹性连接杆中与所述第一弹性支脚相交的端部固定在所述底座上,该弹性连接杆中与所述第二弹性支脚相交的端部则与滑套连接,所述滑套上设置有避让所述推杆的滑孔。
5.根据权利要求4所述的基于多层级柔性机构设计的机器人柔性夹持装置,其特征在于,所述夹持端的外轮廓为弧形,该夹持端上设置有若干个通孔,若干个通孔沿着所述夹持端的外轮廓排列。
6.根据权利要求1所述的基于多层级柔性机构设计的机器人柔性夹持装置,其特征在于,所述多层级柔性爪采用tpu材料通过一体化注塑工艺形成。
7.根据权利要求6所述的基于多层级柔性机构设计的机器人柔性夹持装置,其特征在于,所述多层级柔性爪为两组,两组多层级柔性爪呈90度设置,两组多层级柔性爪采用tpu材料通过一体化注塑工艺形成。
8.根据权利要求7所述的基于多层级柔性机构设计的机器人柔性夹持装置,其特征在于,所述弹性连接件为多组多层级柔性爪中的第一夹持爪和第二夹持爪相交处形成的弹性连接部。
9.根据权利要求4所述的基于多层级柔性机构设计的机器人柔性夹持装置,其特征在于,多组多层级柔性爪中的第一夹持爪和第二夹持爪中的弹性连接杆的端部相交以形成所述的滑套。
10.根据权利要求1所述的基于多层级柔性机构设计的机器人柔性夹持装置,其特征在于,所述多层级柔性爪为多层级单胞构型结构,所述多层级单胞构型结构采用o形构型。
技术总结本发明公开了一种基于多层级柔性机构设计的机器人柔性夹持装置,包括底座、多层级柔性爪和夹持驱动机构;多组所述的多层级柔性爪在所述底座上呈圆周排列;每组多层级柔性爪包括第一夹持爪和第二夹持爪;所述第一夹持爪和所述第二夹持爪之间通过弹性连接件连接;所述夹持爪上设置有夹持端,所述第一夹持爪和所述第二夹持爪的夹持端构成多层级柔性爪的夹持口;所述夹持驱动机构用于驱动所述弹性连接件向下运动,以促使所述第一夹持爪和所述第二夹持爪的夹持端以该弹性连接件为转动支点做相向转动,以实现夹持动作。本发明的机器人柔性夹持装置可实现对不同大小和形状不规则的夹持物进行自适应抓取,且通用性和实用性强,从而有利于大批量生产。技术研发人员:王昱,张文杭,曾山,陈婉琼受保护的技术使用者:华南农业大学技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/51020.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表