一种柔性管路的自动化操作方法与流程
- 国知局
- 2024-07-08 10:57:27
本发明涉及医药生产,具体为一种柔性管路的自动化操作方法。
背景技术:
1、高端药品行业处在快速发展期,手工研发与生产方式难以满足工业化大规模研发与生产的需求,各种培养袋、储液袋、废液袋、培养瓶、储液瓶等各类型耗材,大量使用软管进行样本、 各类型试剂、缓冲液等的传输转移, 软管操作是常规的、大批量操作,但现有的传统手工操作软管仍然存在不足之处,具体为:现有的手工操作软管操作步骤较多,专业性较强,成功率、稳定性、均一性与操作人员的状态息息相关,很难满足大规模、稳定的生产需求,操作不当时,易产生漏液等风险,操作效率低,传统的手工操作需要人员参与,每次操作差异性的存在即有很大的染菌风险,不同人员的操作,会带来相应工艺稳定性与复杂性的问题,且大规模的人工操作,易产生样本间的混淆,手动操作完全不能满足要求,无法实现阵列化、规模化的实验与生产。
2、因此,需要一种柔性管路的自动化操作方法来解决上述背景技术中提出的问题。
技术实现思路
1、本发明的目的在于提供一种柔性管路的自动化操作方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种柔性管路的自动化操作方法,包括以下步骤:
4、s1,双臂机器人姿态回原,机器人双臂将柔性管路放置位的两根软管分别夹持到柔性管路熔接位的相应位置,中途保持管路基本绷紧,放到目标位时,机器人双臂轻微下压,使柔性管路自适应卡紧;
5、s2,机器人单臂操作卡扣加长压板,使卡扣处于压紧状态,机器人单臂操作柔性控制屏“weld”控制按钮,接管机自动熔接柔性管路;
6、s3,待接管机熔接完成后,机器人单臂操作加长压板,使卡扣处于掀开状态,取出熔接完成之后的熔接管路,重复以上操作,进行下一次的管路热熔。
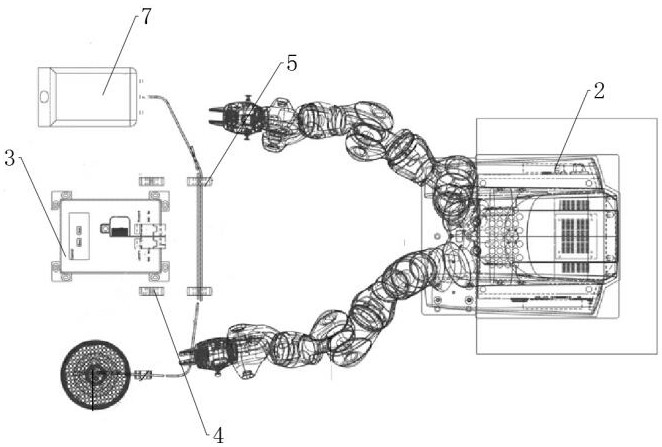
7、作为本发明优选的方案,所述装置包括底座,所述底座的顶部安装有协作机器人,所述底座的顶部且在协作机器人的右侧设置有无菌接管机,所述底座的顶部且在无菌接管机的两侧均设置有柔性管路熔接位,所述底座的顶部且在柔性管路熔接位的左侧设置有柔性管路放置位,所述柔性管路熔接位和柔性管路放置位的顶部开设有自适应双卡口工位,所述底座的顶部且在远离无菌接管机位置处设置有耗材放置位,所述无菌接管机的顶部安装有柔性控制屏,所述柔性控制屏的外壁设置有控制按钮,所述无菌接管机的顶部安装有刀片存储盒,所述无菌接管机的外壁且在靠近刀片存储盒位置处安装有卡扣,所述卡扣的外壁安装有加长压板。
8、作为本发明优选的方案,所述协作机器人为双臂配置,协作机器人的双臂配置合适的抓取角度、抓取速度及抓取负载,可平稳地将柔性管路送至热熔工位并将其固定,协作机器人的单臂可独立轻柔快速点击无菌接管机的操作屏幕,同时也可独立快速轻柔地控制无菌接管机的卡扣上的加长压板,使其准确下压,让柔性管路在无菌接管机中达到工作前的准备状态。
9、作为本发明优选的方案,所述无菌接管机具有自动换刀功能,无菌接管机上的柔性控制屏可实现一键复位、一键熔接,熔接完成之后自动退刀置刀片存储盒。
10、作为本发明优选的方案,所述柔性管子在熔接前需要通过自带卡扣将其压紧,整套动作由协作机器人来完成。
11、作为本发明优选的方案,所述柔性管路熔接位和柔性管路放置位均设置有两组,且两组柔性管路熔接位和柔性管路放置位分别对称安装在无菌接管机两侧。
12、作为本发明优选的方案,所述自适应双卡口工位中心与无菌接管机卡扣中心保持在同一直线上,在水平方向比无菌接管机卡扣位置略低,这样可保障协作机器人放置柔性管路时能完全卡进无菌接管机熔接位。
13、作为本发明优选的方案,所述耗材放置位放置的耗材包括但不限于培养袋、储液袋、反应袋、检测袋、废液袋、液桶、液瓶等常见耗材。
14、与现有技术相比,本发明的有益效果是:
15、1、本发明中,通过双臂机器人姿态回原,机器人双臂将柔性管路放置位的两根软管分别夹持到柔性管路熔接位的相应位置,中途保持管路基本绷紧,放到目标位时,机器人双臂轻微下压,使柔性管路自适应卡紧,机器人单臂操作卡扣加长压板,使卡扣处于压紧状态,机器人单臂操作柔性控制屏“weld”控制按钮,接管机自动熔接柔性管路,待接管机熔接完成后,机器人单臂操作加长压板,使卡扣处于掀开状态,取出熔接完成之后的熔接管路,重复以上操作,进行下一次的管路热熔,能够数量级降低接管过程中人员的使用量,同时数量级提高全工艺流程的处理通量,实现了工艺流程中对核心设备的集成化使用,数量级减少对空间的使用需求,利用自动化操作替代传统手工操作,解决生产过程中目标物熔接质量稳定性、重复性的问题,有效地保障流程操作过程中样本、环境和操作人员的生物安全性,严格避免样本间的混淆和交叉污染,与上下游自动化系统可进行智能化衔接。
技术特征:1.一种柔性管路的自动化操作方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种柔性管路的自动化操作方法用装置,其特征在于:所述装置包括底座(1),所述底座(1)的顶部安装有协作机器人(2),所述底座(1)的顶部且在协作机器人(2)的右侧设置有无菌接管机(3),所述底座(1)的顶部且在无菌接管机(3)的两侧均设置有柔性管路熔接位(4),所述底座(1)的顶部且在柔性管路熔接位(4)的左侧设置有柔性管路放置位(5),所述柔性管路熔接位(4)和柔性管路放置位(5)的顶部开设有自适应双卡口工位(6),所述底座(1)的顶部且在远离无菌接管机(3)位置处设置有耗材放置位(7),所述无菌接管机(3)的顶部安装有柔性控制屏(8),所述柔性控制屏(8)的外壁设置有控制按钮(9),所述无菌接管机(3)的顶部安装有刀片存储盒(10),所述无菌接管机(3)的外壁且在靠近刀片存储盒(10)位置处安装有卡扣(11),所述卡扣(11)的外壁安装有加长压板(12)。
3.根据权利要求2所述的一种柔性管路的自动化操作方法用装置,其特征在于:所述协作机器人(2)为双臂配置,协作机器人(2)的双臂配置合适的抓取角度、抓取速度及抓取负载,可平稳地将柔性管路送至热熔工位并将其固定,协作机器人(2)的单臂可独立轻柔快速点击无菌接管机(3)的操作屏幕,同时也可独立快速轻柔地控制无菌接管机(3)的卡扣(11)上的加长压板(12),使其准确下压,让柔性管路在无菌接管机(3)中达到工作前的准备状态。
4.根据权利要求2所述的一种柔性管路的自动化操作方法用装置,其特征在于:所述无菌接管机(3)具有自动换刀功能,无菌接管机(3)上的柔性控制屏(8)可实现一键复位、一键熔接,熔接完成之后自动退刀置刀片存储盒(10)。
5.根据权利要求2所述的一种柔性管路的自动化操作方法用装置,其特征在于:所述柔性管子在熔接前需要通过自带卡扣将其压紧,整套动作由协作机器人(2)来完成。
6.根据权利要求2所述的一种柔性管路的自动化操作方法用装置,其特征在于:所述柔性管路熔接位(4)和柔性管路放置位(5)均设置有两组,且两组柔性管路熔接位(4)和柔性管路放置位(5)分别对称安装在无菌接管机(3)两侧。
7.根据权利要求2所述的一种柔性管路的自动化操作方法用装置,其特征在于:所述自适应双卡口工位(6)中心与无菌接管机(3)卡扣中心保持在同一直线上,在水平方向比无菌接管机(3)卡扣位置略低,这样可保障协作机器人(2)放置柔性管路时能完全卡进无菌接管机(3)熔接位。
8.根据权利要求2所述的一种柔性管路的自动化操作方法用装置,其特征在于:所述耗材放置位(7)放置的耗材包括但不限于培养袋、储液袋、反应袋、检测袋、废液袋、液桶、液瓶等常见耗材。
技术总结本发明涉及医药生产技术领域,尤其为一种柔性管路的自动化操作方法,包括以下步骤:S1,双臂机器人姿态回原,机器人双臂将柔性管路放置位的两根软管分别夹持到柔性管路熔接位的相应位置,中途保持管路基本绷紧,放到目标位时,机器人双臂轻微下压,使柔性管路自适应卡紧,本发明可以有效解决现有的手工操作软管操作步骤较多,成功率、稳定性、均一性与操作人员的状态息息相关,无法满足大规模、稳定的生产需求,操作不当时,易产生漏液等风险,操作效率低,每次操作差异性的存在即有很大的染菌风险,相应工艺稳定性较低,且大规模的人工操作,易产生样本间的混淆,手动操作完全不能满足要求,无法实现阵列化、规模化的实验与生产的问题。技术研发人员:陈皓受保护的技术使用者:英诺维尔智能科技(苏州)有限公司技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/51172.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表