一种基于液气相变的电驱动柔性抓手
- 国知局
- 2024-07-08 10:57:56
本发明涉及一种电驱动柔性抓手,涉及软体机器人,具体涉及一种基于液气相变的电驱动柔性抓手。
背景技术:
1、随着软体机器人和软材料的兴起,软体抓手因其具有易于制造、易于控制、能够抓取易碎物体等优势而备受关注。
2、但是,目前的软体抓手由于其自身结构的限制,无法实现形状和尺寸自适应的抓取,并且需要携带笨重的气泵,无法应用于跨区域移动作业的机器人上。
技术实现思路
1、为了克服背景技术中存在的问题,本发明所提供一种
2、能够抓取不同形状和尺寸的物体的柔性抓手,并且抓手结构紧凑、质量较轻,无需通过笨重的气动泵充气来实现变形。
3、本发明采用的技术方案是:
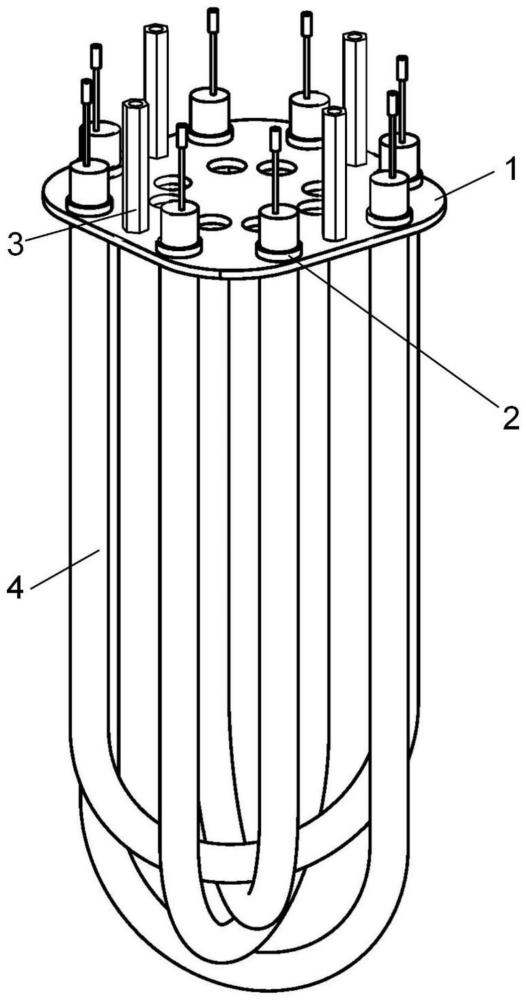
4、本发明的基于液气相变的电驱动柔性抓手包括水平布置的固定台和四个u形柔性执行器,四个u形柔性执行器的顶部对称安装在固定台上,四个u形柔性执行器的底部位于固定台的正下方并自上而下依次布置。
5、所述的每个u形柔性执行器包括两个电极、柔性基体、电阻丝和两根导线,柔性基体为u形条状结构,柔性基体的上两端通过卡扣对称安装在固定台上,柔性基体为中空结构,电阻丝位于柔性基体的内底部,电阻丝的两端分别通过一根导线连接至一个电极,两个电极电连接外部电源;柔性基体的内底部还装有低沸点液体。
6、所述的柔性基体靠近固定台中心的内侧壁的厚度大于远离固定台中心的外侧壁的厚度。柔性基体内部空心且存在由于偏心导致的壁厚差异,较厚一侧壁厚为较薄一侧壁厚的三至四倍。
7、所述的两根导线的下端浸没于低沸点液体中;两根导线的下部、低沸点液体和电阻丝均密封于柔性基体内部。电阻丝能够将低沸点液体(例如氟化液、无水乙醇)加热到其沸点温度(<78℃),使其发生从液体到气体的相变过程,使得柔性基体内部的气压增大。
8、所述的四个u形柔性执行器的柔性基体的长度依次减少,每个柔性基体的上两端分别安装在固定台的四个顶角的对称位置处开设的u形柔性执行器安装孔中;长度最短的柔性基体和长度较长的柔性基体的其中一端分别位于固定台的第一个顶角的对称两侧,长度最短的柔性基体和长度较长的柔性基体的另一端分别位于固定台的第三个顶角的对称两侧,长度较短的柔性基体和长度最长的柔性基体的其中一端分别位于固定台的第二个顶角的对称两侧,长度较短的柔性基体和长度最长的柔性基体的另一端分别位于固定台的第四个顶角的对称两侧,柔性基体的两端均分别中心对称于固定台的中心;柔性基体按长度自上而下依次布置。
9、所述的固定台的顶面开设的安装柱连接孔内还均匀间隔对称设有若干用于安装的安装柱。
10、所述的固定台上还均匀间隔对称开设有若干用于减重的减重孔。
11、本发明的基于液气相变的电驱动柔性抓手的控制方法,包括:
12、所述的电驱动柔性抓手首先通过若干安装柱固定安装在外部移动机器人上,将各个电极连通外部电源,通过控制移动机器人移动使得电驱动柔性抓手移动至待抓取物体附近并使得待抓取物体穿过各个u形柔性执行器并位于各个柔性基体之间,然后通过外部电源向各个电极施加电压,电压经过两根导线作用在电阻丝上,电阻丝开始发热并使得密封在柔性基体内部的低沸点液体发生液气相变,即由液态转变为气态,导致柔性基体内部的气体压力增大,由于柔性基体偏心造成的壁厚差异,柔性基体两侧壁面变形出不同的伸长量,即较厚一侧壁面的伸长量小,而较薄一侧壁面的伸长量大,柔性基体产生缠绕变形,多根u形柔性执行器组成的基于液气相变的电驱动柔性抓手缠绕并包裹住待抓取物体,实现抓取。
13、在实际抓取物体时,可以将电驱动柔性抓手安装在外部移动机器人上,例如无人机,通过靠近被抓物体,使得u形柔性执行器穿过物体并覆盖在物体周围,紧接着,无人机修正抓取位置;最后,电阻丝加热低沸点液体使得所述抓手膨胀夹紧物体。
14、所述的电阻丝的发热时间越长,u形柔性执行器的变形程度越大,电驱动柔性抓手的抓取力的越大。
15、本发明的有益效果是:
16、1、基于液气相变的电驱动柔性抓手具有自适应能力,能够抓取不同大小和尺寸的物体。
17、2、基于液气相变的电驱动方式避免了对笨重的气动泵的需求,适合装备在跨区域移动作业的机器人上。
18、3、u形的设计使得抓手抓取结束后,柔性基体内部受热蒸发的低沸点液体能够重新冷凝流回到柔性基体底部,以供下一次相变使用。
19、4、u形的设计使得抓手无需变形也可通过勾、挂的方式抓取物体。
20、总之,本发明能够通过抓手的缠绕变形来抓取各种形状和尺寸的物体,具有广泛的抓取范围和良好的抓取适应性,并且仅需向电阻丝通电即可驱动抓手变形,结构紧凑,质量轻便。
技术特征:1.一种基于液气相变的电驱动柔性抓手,其特征在于:包括水平布置的固定台(1)和四个u形柔性执行器(4),四个u形柔性执行器(4)的顶部对称安装在固定台(1)上,四个u形柔性执行器(4)的底部位于固定台(1)的正下方并自上而下依次布置。
2.根据权利要求1所述的基于液气相变的电驱动柔性抓手,其特征在于:所述的每个u形柔性执行器(4)包括两个电极(41)、柔性基体(42)、电阻丝(44)和两根导线(45),柔性基体(42)为u形条状结构,柔性基体(42)的上两端通过卡扣(2)对称安装在固定台(1)上,柔性基体(42)为中空结构,电阻丝(44)位于柔性基体(42)的内底部,电阻丝(44)的两端分别通过一根导线(45)连接至一个电极(41),两个电极(41)电连接外部电源;柔性基体(42)的内底部还装有低沸点液体(43)。
3.根据权利要求2所述的基于液气相变的电驱动柔性抓手,其特征在于:所述的柔性基体(42)靠近固定台(1)中心的内侧壁的厚度大于远离固定台(1)中心的外侧壁的厚度。
4.根据权利要求2所述的基于液气相变的电驱动柔性抓手,其特征在于:所述的两根导线(45)的下端浸没于低沸点液体(43)中;两根导线(45)的下部、低沸点液体(43)和电阻丝(44)均密封于柔性基体(42)内部。
5.根据权利要求2所述的基于液气相变的电驱动柔性抓手,其特征在于:所述的四个u形柔性执行器(4)的柔性基体(42)的长度依次减少,每个柔性基体(42)的上两端分别安装在固定台(1)的四个顶角的对称位置处;长度最短的柔性基体(42)和长度较长的柔性基体(42)的其中一端分别位于固定台(1)的第一个顶角的对称两侧,长度最短的柔性基体(42)和长度较长的柔性基体(42)的另一端分别位于固定台(1)的第三个顶角的对称两侧,长度较短的柔性基体(42)和长度最长的柔性基体(42)的其中一端分别位于固定台(1)的第二个顶角的对称两侧,长度较短的柔性基体(42)和长度最长的柔性基体(42)的另一端分别位于固定台(1)的第四个顶角的对称两侧,柔性基体(42)的两端均分别中心对称于固定台(1)的中心;柔性基体(42)按长度自上而下依次布置。
6.根据权利要求1所述的基于液气相变的电驱动柔性抓手,其特征在于:所述的固定台(1)的顶面还均匀间隔对称设有若干用于安装的安装柱(3)。
7.根据权利要求1所述的基于液气相变的电驱动柔性抓手,其特征在于:所述的固定台(1)上还均匀间隔对称开设有若干用于减重的减重孔(13)。
8.根据权利要求1-7任一所述的基于液气相变的电驱动柔性抓手的控制方法,其特征在于,包括:所述的电驱动柔性抓手首先通过若干安装柱(3)固定安装在外部移动机器人上,将各个电极(41)连通外部电源,通过控制移动机器人移动使得电驱动柔性抓手移动至待抓取物体附近并使得待抓取物体穿过各个u形柔性执行器(4)并位于各个柔性基体(42)之间,然后通过外部电源向各个电极(41)施加电压,电压经过两根导线(45)作用在电阻丝(44)上,电阻丝(44)开始发热并使得密封在柔性基体(42)内部的低沸点液体(43)发生液气相变,即由液态转变为气态,导致柔性基体(42)内部的气体压力增大,由于柔性基体(42)偏心造成的壁厚差异,柔性基体(42)两侧壁面变形出不同的伸长量,即较厚一侧壁面的伸长量小,而较薄一侧壁面的伸长量大,柔性基体(42)产生缠绕变形,多根u形柔性执行器(4)组成的基于液气相变的电驱动柔性抓手缠绕并包裹住待抓取物体,实现抓取。
9.根据权利要求8所述的基于液气相变的电驱动柔性抓手的控制方法,其特征在于:所述的电阻丝(44)的发热时间越长,u形柔性执行器(4)的变形程度越大,电驱动柔性抓手的抓取力的越大。
技术总结本发明公开了一种基于液气相变的电驱动柔性抓手。电驱动柔性抓手包括水平布置的固定台和四个U形柔性执行器,四个U形柔性执行器的顶部对称安装在固定台上,四个U形柔性执行器的底部位于固定台的正下方并自上而下依次布置。本发明能够通过抓手的缠绕变形来抓取各种形状和尺寸的物体,具有广泛的抓取范围和良好的抓取适应性,并且仅需向电阻丝通电即可驱动抓手变形,结构紧凑,质量轻便。技术研发人员:邹俊,郭欣雨,唐威受保护的技术使用者:浙江大学技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/51253.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表