一种机器人几何参数标定的混合优化辨识方法及系统
- 国知局
- 2024-07-08 10:57:53
本发明属于机器人精度控制,更具体地,涉及一种一种机器人几何参数标定的混合优化辨识方法及系统。
背景技术:
1、为实现柔性生产需求,机器人需要能够快速满足不同的生产要求,通过检测和离线编程等技术,机器人的tcp点能够独立准确到达目标点位。对机器人的绝对定位精度要求较高。
2、现有的参数辨识方法(如cn114918920a、cn113043271b)仍存在由于算法缺陷及样本数据误差导致的过拟合问题,即未考虑修正过的运动学模型在新数据集中存在的较大误差问题,限制了几何参数辨识精度的提升效果。此外,当初始残差较大时,上述辨识算法易出现迭代方向预测偏差大,导致迭代失效或陷入局部最优,无法完成标定任务。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供一种机器人几何参数标定的混合优化辨识方法及系统,在实现工业机器人几何参数误差的高鲁棒性、高精度标定和补偿。
2、为实现上述目的,按照本发明的一方面,提供一种机器人几何参数标定的混合优化辨识方法,包括:
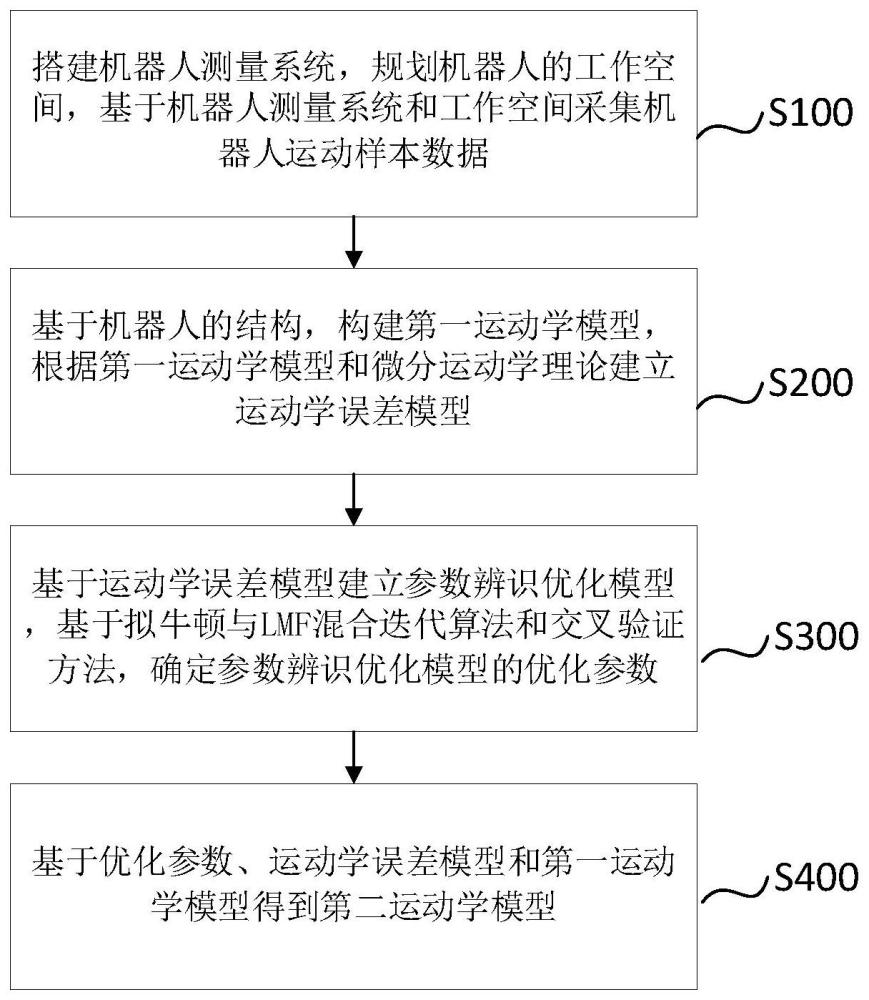
3、搭建机器人测量系统,规划机器人的工作空间,基于机器人测量系统和工作空间采集机器人运动样本数据;
4、基于机器人的结构,构建第一运动学模型,根据第一运动学模型和微分运动学理论建立运动学误差模型;
5、基于运动学误差模型建立参数辨识优化模型,基于拟牛顿与lmf混合迭代算法和交叉验证方法,确定参数辨识优化模型的优化参数;
6、基于优化参数、运动学误差模型和第一运动学模型得到第二运动学模型。
7、进一步地,所述搭建机器人测量系统,规划机器人的工作空间,基于机器人测量系统和工作空间采集机器人运动样本数据,包括:
8、基于激光跟踪仪、跟踪靶、机器人、计算机、转接法兰盘和缆线组装机器人测量系统;
9、基于机器人测量系统标定机器人的基坐标系与激光跟综仪坐标系、机器人末端法兰盘坐标系与跟踪靶坐标系的转换关系;
10、基于机器人预期工作和可达范围,规划工作空间;
11、对工作空间均匀采样得到目标点位,采集目标点位处第一运动样本数据,基于转换关系转换到机器人基坐标系下,得到第二运动样本数据。
12、进一步地,所述基于机器人的结构,构建第一运动学模型,根据第一运动学模型和微分运动学理论建立运动学误差模型,包括:
13、基于机器人的结构,采用机器人运动学建模方法,建立连杆坐标系;
14、基于连杆坐标系和机器人的结构构建第一运动学模型;
15、基于连杆坐标系下第一运动学模型和微分运动学理论建立第一运动学误差模型。
16、进一步地,所述机器人运动学建模方法包括:d-h法、md-h法、cpc法、mcpc法以及poe法。
17、进一步地,所述基于连杆坐标系下第一运动学模型和微分运动学理论建立第一运动学误差模型,还包括:
18、根据运动学误差模型待优化变量的数量级,对待优化变量进行归一化处理,得到第一优化变量;
19、将第一优化变量代入运动学误差模型得到第二运动学误差模型。
20、进一步地,所述基于拟牛顿与lmf混合迭代算法和交叉验证方法,确定参数辨识优化模型的优化参数,包括:
21、基于k折交叉验证确定拟牛顿与lmf混合迭代算法的最优超参数;
22、基于最优超参数和拟牛顿与lmf混合迭代算法确定参数辨识优化模型的优化参数。
23、进一步地,所述基于k折交叉验证确定拟牛顿与lmf混合迭代算法的第二超参数,包括:
24、步骤一、根据机器人运动样本数据划分训练集,设训练集的大小为z,将z/w向下取整得到m,对训练集进行随机w折划分,每折数据大小都为m,其中,若样本存在明显的不一致,则将样本分层;
25、步骤二、对超参数进行初始化,选取w-1折样本用于训练,剩下用于验证,重复w次,对每组超参数w次验证的结果误差求平均值和标准差得到每组超参数的模型性能分数;
26、步骤三、重复上述步骤二,并记录每次的超参数和模型性能分数,根据模型性能分数,选出最优超参数。
27、进一步地,所述基于最优超参数和拟牛顿与lmf混合迭代算法确定参数辨识优化模型的优化参数,包括:
28、s401:对参数辨识优化模型待求解的优化参数进行初始化,x0为迭代计算的初值;t0为海瑟矩阵第二项的迭代初值;k为迭代次数;i为大残量拟牛顿法连续运行的次数;p为大残量拟牛顿法连续迭代的最大次数;ε为梯度行列式的最小值,若梯度行列式小于该值,则迭代终止;uk为lmf法的阻尼系数;p0为下降率;λ0、λ1为正则项系数;α0为线搜索方法初始步长;其中,根据最优超参数确定拟牛顿最多连续运行次数p,正则项系数λ1,λ2和线搜索方法初始步长α0。
29、s402:若||(jk)tfk||<ε成立,则终止迭代,否则转s403;
30、s403:若i≤p不成立,则转s404;若i≤p成立,且||(jk)tjk+tk||<0成立,转s404;若i≤p成立,且||(jk)tjk+tk||<0不成立,i=i+1,转s405;
31、s404:在搜索方向公式的梯度项中加入elasticnet正则项导数,lmf算法迭代方向为:
32、dk=-((jk)tjk+μki)-1((jk)tfk+rk)
33、式中rk=[rk1,rk2,rk3,...,rkn]t,xk=[xk1,xk2,xk3,...,xkn]t,n为运动学参数总数量,λ1和λ2为正则项系数,转s406;
34、s405:计算大残量问题的拟牛顿法迭代方向:
35、dk=-((jk)tjk+tk)-1((jk)tfk+rk)
36、在搜索启动前对搜索方向dk进行归一化处理,并使用wolfe-powell线搜索方法确定搜索步长,取搜索步长αk>0,令dk=αkdk;更新hessian矩阵第二项其中qk=(jk+1)tfk+1-(jk)tfk+1,sk=dk,转s406;
37、s406:计算优化函数值下降率ρk,ρk=aredk/predk,aredk=f(xk)-f(xk+dk),predk=mk(0)-mk(dk);若此时的迭代方向dk由大残量问题的拟牛顿法计算而来,且ρk<p0,则说明大残量问题的拟牛顿法的当前计算结果不如预期,转s404,用lmf法进行迭代;若ρk<p0不成立,则说明当前计算结果符合预期,xk+1=xk+dk,并进入下一步迭代,k=k+1,转s402;若此时的迭代方向dk由lmf法计算而来,转s407;
38、s407,若ρk≥p0,则更新参数xk+1=xk+dk,并更新阻尼系数vk+1=2;否则,不更新参数,更新阻尼系数μk+1=μkvk,vk+1=2vk;该步骤结束后,进入下一步迭代,k=k+1,转步骤s402;
39、迭代终止后得到参数辨识优化模型的优化参数。
40、进一步地,所述基于优化参数、运动学误差模型和第一运动学模型得到第二运动学模型,包括:
41、基于优化参数和运动学误差模型线性变换得到运动学参数补偿值;
42、基于运动学参数补偿值补偿第一运动学模型的运动学参数,得到第二运动学模型。
43、按照本发明的另一方面,提供一种机器人几何参数标定的混合优化辨识系统,包括:
44、第一主模块,用于搭建机器人测量系统,规划机器人的工作空间,基于机器人测量系统和工作空间采集机器人运动样本数据;
45、第二主模块,用于基于机器人的结构,构建第一运动学模型,根据第一运动学模型和微分运动学理论建立运动学误差模型;
46、第三主模块,用于基于运动学误差模型建立参数辨识优化模型,基于拟牛顿与lmf混合迭代算法和交叉验证方法,确定参数辨识优化模型的优化参数;
47、第四主模块,用于基于优化参数、运动学误差模型和第一运动学模型得到第二运动学模型。
48、总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
49、1.本发明的混合优化辨识方法,搭建机器人测量系统,规划机器人的工作空间,划分空间单元,对每个空间单元的机器人运动学建模;以此建立参数辨识优化模型,基于拟牛顿与lmf混合迭代算法和交叉验证方法,确定参数辨识优化模型的优化参数;逆向求解得到标定补偿后的每个空间单元的机器人运动学模型,以提高机器人控制精度。本发明中,经标定补偿后,机器人末端平均误差降低了近87%,误差的标准差提高了近82%,机器人末端绝对位置精度和运动学模型的鲁棒性都得到了极大提升。
50、本技术附加的方面和优点将在下面的描述中部分给出,这些将从下面的描述中变得明显,或通过本技术的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20240617/51247.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表