一种可以旋转调节的机械手的制作方法
- 国知局
- 2024-07-08 10:59:51
本技术涉及机械手设备,具体为一种可以旋转调节的机械手。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点,且机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
2、机械手主要由执行机构、驱动机构和控制系统三大部分组成,手部是用来抓持工件的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型等;运动机构使手部完成各种转动、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势;运动机构的升降、伸缩等独立运动方式,称为机械手的自由度,为了抓取空间中任意位置和方位的物体需有6个自由度,自由度是机械手设计的关键参数。
3、目前在使用机械手时,通常需要根据机械手夹持的物体不同,从而对机械手上的夹持结构进行更换,然后在使用机械手带动夹持结构实现多角度的选择,故可以达到对物体进行搬运的作用。
4、但目前所使用的机械手大多为一体结构,故在需要对不同的物体进行夹持搬运的过程中,需要使用到不同类型的机械手才能进行搬运,从而干扰会增加使用成本,不利于对机械手的使用。
技术实现思路
1、基于此,本实用新型的目的是提供一种可以旋转调节的机械手,以解决所使用的机械手大多为一体结构,故在需要对不同的物体进行夹持搬运的过程中,需要使用到不同类型的机械手才能进行搬运,从而干扰会增加使用成本,不利于对机械手使用的技术问题。
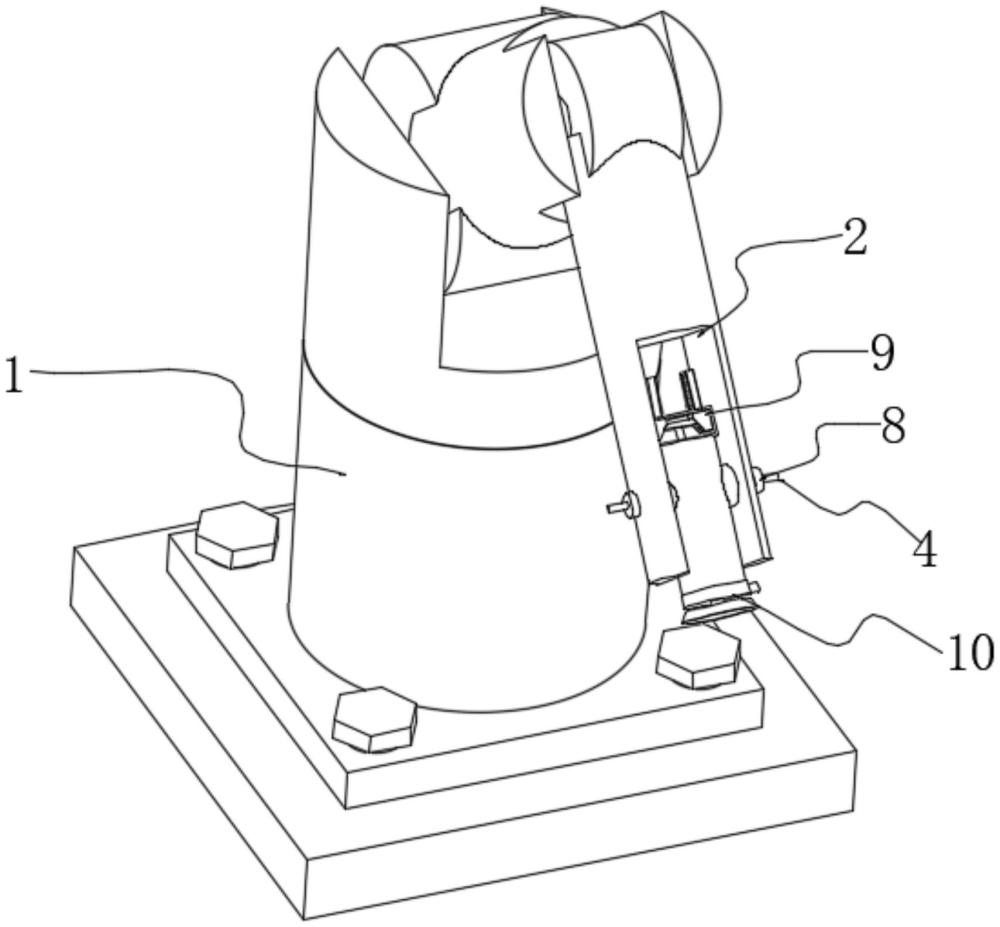
2、为实现上述目的,本实用新型提供如下技术方案:一种可以旋转调节的机械手,包括机械手,所述机械手尾端设置有卡槽,且卡槽内设置有转轴,所述转轴活动贯穿活动块,所述活动块的一端设置有第一夹持结构,且活动块的另一端设置有第二夹持结构,所述机械手和转轴上均设置有十字槽,且十字槽内活动连接有与十字槽位置、尺寸相契合的十字轴,所述十字轴上活动贯穿有螺纹杆,且螺纹杆的外表面螺纹连接有一对螺母。
3、通过采用上述技术方案,在需要使用机械手对物体进行夹持后位置转移时,可以根据实际所需要夹持的物体选择夹持结构,在选择完成后通过转动活动块,使得所需要使用夹持结构的一端靠近物体,然后在通过螺纹杆带着十字轴穿过机械手和转轴上的十字槽后,再螺纹杆的两端拧上螺母,使得螺母紧靠机械手的外表面,有利于对活动杆块的位置进行固定,便于实际所需要夹持的物体选择夹持装置,故可以更好的对物体进行夹持后移动。
4、本实用新型进一步设置为,所述第一夹持结构包括在活动块的一端固定连接有固定块,所述机械手的底部转动连接有液压缸,且液压缸的一端活动贯穿固定块并延伸至内部固定连接有连接块,所述固定块内滑动连接有一对滑块,且连接块在滑块之间滑动,所述滑块的固定连接有第一夹持块,且第一夹持块活动贯穿固定块的底部。
5、通过采用上述技术方案,通过使用液压缸带动连接块上下活动,故可以通过连接块的移动带动滑块在固定块内进行滑动,当需要对物体进行夹持时,可以通过液压缸带动连接块向上运动,则连接块会拉动滑块会同步向内活动故滑块带动第一夹持块对物体进行夹持后进行移动。
6、本实用新型进一步设置为,所述第一夹持块相邻一侧设置有若干个凹槽,所述第一夹持块内设置有气囊,且气囊的一端设置有连接管,且连接管一端活动贯穿第一夹持块的一侧并延伸至外侧。
7、通过采用上述技术方案,当需要对易磕碰的物体进行夹持时,可以通过连接管向第一夹持块内部的气囊进行充气,使得气囊从凹槽内突出,此时桶体液压缸带动第一夹持块对物体进行夹持时,会使得气囊先与物体进行接触,从而通过气囊对物体进行保护后在通过第一夹持块对其进行加快,有利于更好的对物体进行夹持,且不易对物体造成损坏。
8、本实用新型进一步设置为,所述第一夹持块相邻一侧均设置有橡胶垫。
9、通过采用上述技术方案,通过在第一夹持块相邻一侧均设置有橡胶垫,有利于在通过第一夹持块对物体进行夹持时,可以通过橡胶垫与物体之间夹持的更加牢固,便于更好的对物体进行夹持。
10、本实用新型进一步设置为,所述第二夹持结构包括在活动块的另一端转动连接有连接件,且连接件为空腔结构,所述连接件的底部设置有吸盘,且吸盘上设置有若干个孔洞,所述连接件外表面设置有管道。
11、通过采用上述技术方案,当需要使用第二夹持结构需要对物体进行夹持时,可以通过管道连接外部的气泵装置,当需要使用吸盘对物体进行吸住时,可以通过管道吸走空腔,使得吸盘与物体紧密连接,从而达到对物体进行夹持的效果,便于更好的对物体进行移动。
12、综上所述,本实用新型主要具有以下有益效果:
13、本实用新型通过在机械手尾端设置有凹槽,且凹槽内转动连接有转轴,在转轴和机械手上均设置有十字槽,且十字槽外表面固定连接有十字轴,十字轴上活动管道有螺纹杆,且螺纹杆的外表面螺纹连接有螺母,同时转轴活动贯穿活动块,在活动块的两端分别设置有第一夹持结构和第二夹持结构,当需要使用机械手对物体进行夹持后位置转移时,可以根据实际所需要夹持的物体选择夹持结构,在选择完成后通过转动活动块,使得所需要使用夹持结构的一端靠近物体,然后在通过螺纹杆带着十字轴穿过机械手和转轴上的十字槽后,再螺纹杆的两端拧上螺母,使得螺母紧靠机械手的外表面,有利于对活动杆块的位置进行固定,便于实际所需要夹持的物体选择夹持装置,故可以更好的对物体进行夹持后移动。
技术特征:1.一种可以旋转调节的机械手,包括机械手(1),其特征在于:所述机械手(1)尾端设置有卡槽(2),且卡槽(2)内转动连接有转轴(3),所述转轴(3)外表面设置有活动块(5),所述活动块(5)的一端设置有第一夹持结构(9),且活动块(5)的另一端设置有第二夹持结构(10),所述机械手(1)和转轴(3)上均设置有十字槽(7),且十字槽(7)内活动连接有与十字槽(7)位置、尺寸相契合的十字轴(6),所述十字轴(6)上活动贯穿有螺纹杆(4),且螺纹杆(4)的外表面螺纹连接有一对螺母(8)。
2.根据权利要求1所述的可以旋转调节的机械手,其特征在于:所述第一夹持结构(9)包括在活动块(5)的一端固定连接有固定块(901),所述机械手(1)的底部转动连接有液压缸(902),且液压缸(902)的一端活动贯穿固定块(901)并延伸至内部固定连接有连接块(903),所述固定块(901)内滑动连接有一对滑块(904),且连接块(903)在滑块(904)之间滑动,所述滑块(904)的固定连接有第一夹持块(905),且第一夹持块(905)活动贯穿固定块(901)的底部。
3.根据权利要求2所述的可以旋转调节的机械手,其特征在于:所述第一夹持块(905)相邻一侧设置有若干个凹槽(908),所述第一夹持块(905)内设置有气囊(906),且气囊(906)的一端设置有连接管(907),且连接管(907)一端活动贯穿第一夹持块(905)的一侧并延伸至外侧。
4.根据权利要求2所述的可以旋转调节的机械手,其特征在于:所述第一夹持块(905)相邻一侧均设置有橡胶垫(909)。
5.根据权利要求1所述的可以旋转调节的机械手,其特征在于:所述第二夹持结构(10)包括在活动块(5)的另一端转动连接有连接件(1001),且连接件(1001)为空腔(1002)结构,所述连接件(1001)的底部设置有吸盘(1004),且吸盘(1004)上设置有若干个孔洞(1005),所述连接件(1001)外表面设置有管道(1003)。
技术总结本技术公开了一种可以旋转调节的机械手,涉及机械手设备技术领域,包括机械手,所述机械手尾端设置有卡槽,且卡槽内设置有转轴,所述转轴活动贯穿活动块,所述活动块的一端设置有第一夹持结构,且活动块的另一端设置有第二夹持结构。本技术在需要使用机械手对物体进行夹持后位置转移时,可以根据实际所需要夹持的物体选择夹持结构,在选择完成后通过转动活动块,使得所需要使用夹持结构的一端靠近物体,然后在通过螺纹杆带着十字轴穿过机械手和转轴上的十字槽后,再螺纹杆的两端拧上螺母,使得螺母紧靠机械手的外表面,有利于对活动杆块的位置进行固定,便于实际所需要夹持的物体选择夹持装置,故可以更好的对物体进行夹持后移动。技术研发人员:陈健,孙宇,冯海超受保护的技术使用者:天津宏联祥机械制造有限公司技术研发日:20231117技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/51404.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表