一种提高机器人装夹重载工件时定位精度的辅助夹具装置的制作方法
- 国知局
- 2024-07-08 10:59:54
本发明涉及产线自动化,尤其涉及一种提高机器人装夹重载工件时定位精度的辅助夹具装置。
背景技术:
1、随着科技的不断进步及国家的政策支持,使得产线自动化规模也在不断扩大。越来越多的企业开始注重自动化技术的应用,以提高生产效率、降低成本、提高产品质量等。产线自动化的重点包括原材料的搬运、存储、检测、加工、包装等环节,每个环节成败的关键都是由设备的定位精度决定的。目前重载工件在以上环节中主要依靠机器人来完成,但是机器人在装夹搬运重载工件中,随着载荷中心距离的不断增加,机器人的动态性能变差,有效载荷急剧下降,最终导致定位精度的丢失,设备的故障率急剧升高。严重影响产线设备在自动化过程中的稼动率,无法实现产线的高度自动化。
2、为了保证设备在自动化过程中的稼动率,确保黑灯工厂自动线在加工过程实现高度自动化,特发明一种提高机器人装夹重载工件时定位精度的辅助夹具装置。
技术实现思路
1、本发明的目的是为了解决现有的机器人在装夹搬运重载工件中,随着载荷中心距离的不断增加,机器人的动态性能变差,有效载荷急剧下降,最终导致定位精度的丢失,设备的故障率急剧升高的缺点,而提出的一种提高机器人装夹重载工件时定位精度的辅助夹具装置。
2、为了实现上述目的,本发明采用了如下技术方案:
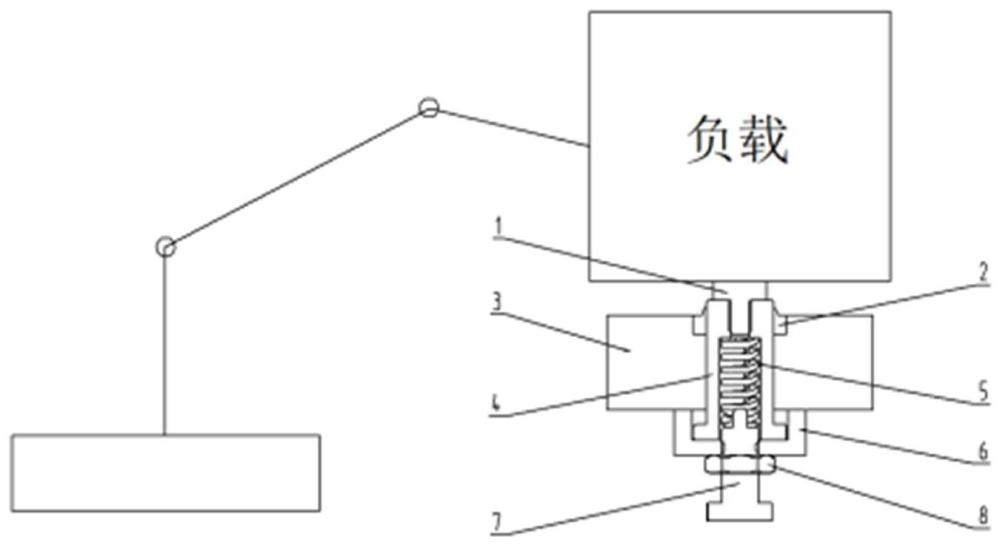
3、一种提高机器人装夹重载工件时定位精度的辅助夹具装置,包括支撑板和机器人,所述机器人上安装有手爪,所述手爪上设有负载,所述支撑板上滑动连接有滑动支柱,所述滑动支柱的顶端安装有耐磨触头,所述耐磨触头与所述负载相互配合,所述支撑板的底部固定安装有盖板,所述盖板上活动连接有调节螺柱,所述滑动支柱的底部开设有放置槽,所述放置槽的底部内壁上安装有重载弹簧,所述重载弹簧与所述调节螺柱相互配合。
4、优选的,所述支撑板的顶部开设有凹槽,所述凹槽内固定有防污染挡圈,所述防污染挡圈与滑动支柱相互配合,防污染挡圈的设置,能够便于对支撑板与滑动支柱之间进行密封放置,防止灰尘进入,影响设备的灵活性。
5、优选的,所述耐磨触头采用合金钢材质,顶部形状做球面设计,且耐磨触头的表面镀硬铬处理,耐磨触头表面镀硬铬处理减少了接触面积同时提高了耐磨性,若载重工件接触面不允许划伤,耐磨触头也可头部镶嵌比重载工件硬度低的材质,或者整个耐磨触头,采用其他材质。
6、优选的,所述防污染挡圈采用钢骨架和黑色丁晴胶组合设计结构,性价比高,市场使用率高,互换性高。
7、优选的,所述滑动支柱使用表面硬化钢材质,空心圆柱结构设计,同时滑动支柱与支撑板采用h7/g6的公差配合,考虑经济性的同时又能保证耐磨性。
8、优选的,所述调节螺柱设计成细牙螺纹,调节螺柱可精准调控重载弹簧的弹力,间接调控机器人末端的负载。
9、优选的,所述调节螺柱上螺纹连接有螺母,所述螺母与所述盖板固定连接,螺母的设置能够通过与调节螺柱的螺纹连接,从而能够对调节螺柱进行定位。
10、优选的,所述滑动支柱的顶端开设有卡槽,所述卡槽与所述耐磨触头相互卡装,卡槽与耐磨触头的卡装连接,从而能够对卡槽进行安装拆卸,便于人们使用。
11、与现有技术相比,本发明的优点在于:
12、1,本方案弥补了自动化产线中机器人随着载荷中心距离不断增加动态性能变差的先天性不足的缺陷;
13、2,提高了工件在搬运装夹过程中的定位精度;
14、3,降低了工件的装夹时间及设备的故障率。
15、本发明制作成本低、可维护性高,且允许组合使用,有效降低了实现自动化产线的整线成本。
技术特征:1.一种提高机器人装夹重载工件时定位精度的辅助夹具装置,包括支撑板(3)和机器人,其特征在于,所述机器人上安装有手爪,所述手爪上设有负载,所述支撑板(3)上滑动连接有滑动支柱(4),所述滑动支柱(4)的顶端安装有耐磨触头(1),所述耐磨触头(1)与所述负载相互配合,所述支撑板(3)的底部固定安装有盖板(6),所述盖板(6)上活动连接有调节螺柱(7),所述滑动支柱(4)的底部开设有放置槽,所述放置槽的底部内壁上安装有重载弹簧(5),所述重载弹簧(5)与所述调节螺柱(7)相互配合。
2.根据权利要求1所述的一种提高机器人装夹重载工件时定位精度的辅助夹具装置,其特征在于,所述支撑板(3)的顶部开设有凹槽,所述凹槽内固定有防污染挡圈(2),所述防污染挡圈(2)与滑动支柱(4)相互配合。
3.根据权利要求1所述的一种提高机器人装夹重载工件时定位精度的辅助夹具装置,其特征在于,所述耐磨触头(1)采用合金钢材质,顶部形状做球面设计,且耐磨触头(1)的表面镀硬铬处理。
4.根据权利要求1所述的一种提高机器人装夹重载工件时定位精度的辅助夹具装置,其特征在于,所述防污染挡圈(2)采用钢骨架和黑色丁晴胶组合设计结构。
5.根据权利要求1所述的一种提高机器人装夹重载工件时定位精度的辅助夹具装置,其特征在于,所述滑动支柱(4)使用表面硬化钢材质,空心圆柱结构设计,同时滑动支柱(4)与支撑板(1)采用h7/g6的公差配合。
6.根据权利要求1所述的一种提高机器人装夹重载工件时定位精度的辅助夹具装置,其特征在于,所述调节螺柱(7)设计成细牙螺纹。
7.根据权利要求1所述的一种提高机器人装夹重载工件时定位精度的辅助夹具装置,其特征在于,所述调节螺柱(7)上螺纹连接有螺母(8),所述螺母(8)与所述盖板(6)固定连接。
8.根据权利要求1所述的一种提高机器人装夹重载工件时定位精度的辅助夹具装置,其特征在于,所述滑动支柱(4)的顶端开设有卡槽,所述卡槽与所述耐磨触头(1)相互卡装。
技术总结本发明属于产线自动化技术领域,尤其是一种提高机器人装夹重载工件时定位精度的辅助夹具装置,针对现有的机器人在装夹搬运重载工件中,随着载荷中心距离的不断增加,机器人的动态性能变差,有效载荷急剧下降,最终导致定位精度的丢失,设备的故障率急剧升高的问题,现提出如下方案,其包括支撑板和机器人,所述机器人上安装有手爪,所述手爪上设有负载,所述支撑板上滑动连接有滑动支柱,所述滑动支柱的顶端安装有耐磨触头,所述耐磨触头与所述负载相互配合,所述支撑板的底部固定安装有盖板,所述盖板上活动连接有调节螺柱。本发明制作成本低、可维护性高,且允许组合使用,有效降低了实现自动化产线的整线成本。技术研发人员:李超,周明星,齐泮华受保护的技术使用者:交大智邦(枣庄)数字科技有限公司技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/51415.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表