一种基于机器人视觉传感定位装置的制作方法
- 国知局
- 2024-07-08 11:00:28
本技术涉及视觉传感,具体为一种基于机器人视觉传感定位装置。
背景技术:
1、在当代工业中,机器人指能自动执行任务的人造机器装置,用以取代或协助人类工作。理想中的高仿真机器人是高级整合控制论、机械电子、计算机与人工智能、材料学和仿生学的产物,目前科学界正在向此方向研究开发;
2、专利申请号cn202120755489.9公开的一种多窗口机器人视觉定位装置,包括固定架,所述固定架端头的下侧通过螺丝固定安装有电动伸缩杆,所述电动伸缩杆的活动端固定安装有视觉检测机构,所述固定架上端面的中间位置固定安装有固定套筒,所述固定套筒的边侧开设有螺孔,所述固定架的边侧固定安装有控制面板。
3、上述定位装置在使用时,仅通过照明灯对被测物体进行照射,减少阴影面积,以达到清晰拍摄的作用,但是在实际应用过程中,照明灯射出的光线被分散了,导致较远距离的待测物体并不能减少阴影,同时,照射角度无法改变,有时照明的角度并不完全适配设备拍摄。
技术实现思路
1、本部分的目的在于概述本实用新型的实施方式的一些方面以及简要介绍一些较佳实施方式。在本部分以及本申请的说明书摘要和实用新型名称中可能会做些简化或省略以避免使本部分、说明书摘要和实用新型名称的目的模糊,而这种简化或省略不能用于限制本实用新型的范围。
2、因此,本实用新型的目的是提供一种基于机器人视觉传感定位装置,通过补光灯对被测物体进行照射,减少阴影面积,使定位件拍摄更加清晰,并且,聚光罩的设置能将补光灯发出的光线聚集,防止补光光线分散,同时,通过万向座作为连接基座,与活动槽配合,能微调补光灯照射方向,进而将补光光线调至最佳角度。
3、为解决上述技术问题,根据本实用新型的一个方面,本实用新型提供了如下技术方案:
4、一种基于机器人视觉传感定位装置,其包括:
5、连接基架的连接外壳,连接外壳前侧呈对称一体成型连接有连接座,连接座上开设有多组活动槽;
6、补光部件,设有多组,多组补光部件连接于连接座上,包括聚光罩,聚光罩内安装补光灯,聚光罩通过支杆与万向座连接,万向座置于活动槽内并在活动槽内转动。
7、作为本实用新型所述的一种基于机器人视觉传感定位装置的一种优选方案,其中:多个所述活动槽沿连接座外侧从上至下呈线性等距排列设置。
8、作为本实用新型所述的一种基于机器人视觉传感定位装置的一种优选方案,其中:所述连接外壳外侧连接有定位件,定位件包括激光距离传感器及rgb摄像头。
9、作为本实用新型所述的一种基于机器人视觉传感定位装置的一种优选方案,其中:所述连接外壳上设有对接线限位的布线部件,布线部件包括连接于连接外壳顶部的走线架,及开设于连接外壳外侧与走线架适配的线槽,线槽内连接限位带。
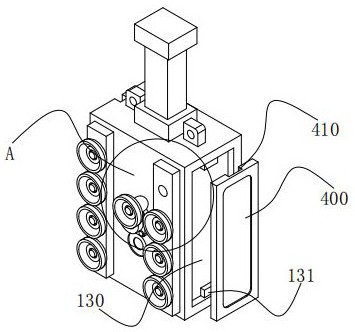
10、作为本实用新型所述的一种基于机器人视觉传感定位装置的一种优选方案,其中:所述连接外壳外侧开设有通风口,通风口内顶部与底部均一体成型连接有卡扣。
11、作为本实用新型所述的一种基于机器人视觉传感定位装置的一种优选方案,其中:所述通风口内设置防尘板,防尘板外侧开设有与卡扣卡装配合的卡槽。
12、与现有技术相比:通过补光灯对被测物体进行照射,减少阴影面积,使定位件拍摄更加清晰,并且,聚光罩的设置能将补光灯发出的光线聚集,防止补光光线分散,同时,通过万向座作为连接基座,与活动槽配合,能微调补光灯照射方向,进而将补光光线调至最佳角度。
技术特征:1.一种基于机器人视觉传感定位装置,其特征在于,包括:
2.根据权利要求1所述的一种基于机器人视觉传感定位装置,其特征在于,多个所述活动槽(121)沿连接座(120)外侧从上至下呈线性等距排列设置。
3.根据权利要求1所述的一种基于机器人视觉传感定位装置,其特征在于,所述连接外壳(100)外侧连接有定位件(110),定位件(110)包括激光距离传感器及rgb摄像头。
4.根据权利要求1所述的一种基于机器人视觉传感定位装置,其特征在于,所述连接外壳(100)上设有对接线限位的布线部件(300),布线部件(300)包括连接于连接外壳(100)顶部的走线架(310),及开设于连接外壳(100)外侧与走线架(310)适配的线槽(320),线槽(320)内连接限位带(321)。
5.根据权利要求1所述的一种基于机器人视觉传感定位装置,其特征在于,所述连接外壳(100)外侧开设有通风口(130),通风口(130)内顶部与底部均一体成型连接有卡扣(131)。
6.根据权利要求5所述的一种基于机器人视觉传感定位装置,其特征在于,所述通风口(130)内设置防尘板(400),防尘板(400)外侧开设有与卡扣(131)卡装配合的卡槽(410)。
技术总结本技术公开的属于视觉传感技术领域,具体为一种基于机器人视觉传感定位装置,包括连接外壳,连接外壳前侧呈对称一体成型连接有连接座,连接座上开设有多组活动槽,补光部件设有多组,多组补光部件连接于连接座上,包括聚光罩,聚光罩内安装补光灯,聚光罩通过支杆与万向座连接,万向座置于活动槽内,并在活动槽内转动,通过补光灯对被测物体进行照射,减少阴影面积,使定位件拍摄更加清晰,并且,聚光罩的设置能将补光灯发出的光线聚集,防止补光光线分散,同时,通过万向座作为连接基座,与活动槽配合,能微调补光灯照射方向,进而将补光光线调至最佳角度。技术研发人员:陶浩然,陈栋,孙崇洋,于文涛受保护的技术使用者:潍坊海之晨人工智能有限公司技术研发日:20230907技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/51447.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表