一种分拣设备及基于瞬时力反馈的分拣轨迹生产方法与流程
- 国知局
- 2024-07-08 11:04:34
本发明涉及服装制造,特别涉及一种分拣设备及基于瞬时力反馈的分拣轨迹生产方法。
背景技术:
1、目前服装生产线中的裁片,均是通过激光切割后机械手自动取布料,并将同一套服装的布料放进一个周转箱内,存在以下三个问题:1、前道工序在人工排版不同大小裁片时,因考虑布料最高利用率,每套裁片的位置不尽相同,机械手根据裁片所在不同位置及区域进行判断并编程不同分拣轨迹,不然布料容易被拉带起,需人工捋平才能切割下一版;2、当每版的裁片数量不固定,随数量的增加,剩余的边角料就会增多且更分散,裁床对布料的吸力会减弱,增加被拉带起的风险,需要重新示教机械手分拣轨迹;3、在示教机械手,编程程序时,需要根据布料与底布分离的粘连情况,需要反复验证,查找规律,通过反向拉扯已达到不被拉带起的要求,调试效率较低。
技术实现思路
1、为了解决上述问题,本发明的目的是提供一种分拣设备及基于瞬时力反馈的分拣轨迹生产方法,通过机械手代替人工取料,可以根据抓取后基于布料之间拉扯产生的瞬时力,来自动生成分拣轨迹,通过反方向拖动将布片分离,代替每次遇到不同的工况,需要重新示教和编程,从而降低研发成本,提高智能生产水平。
2、本发明通过以下技术方案实现:
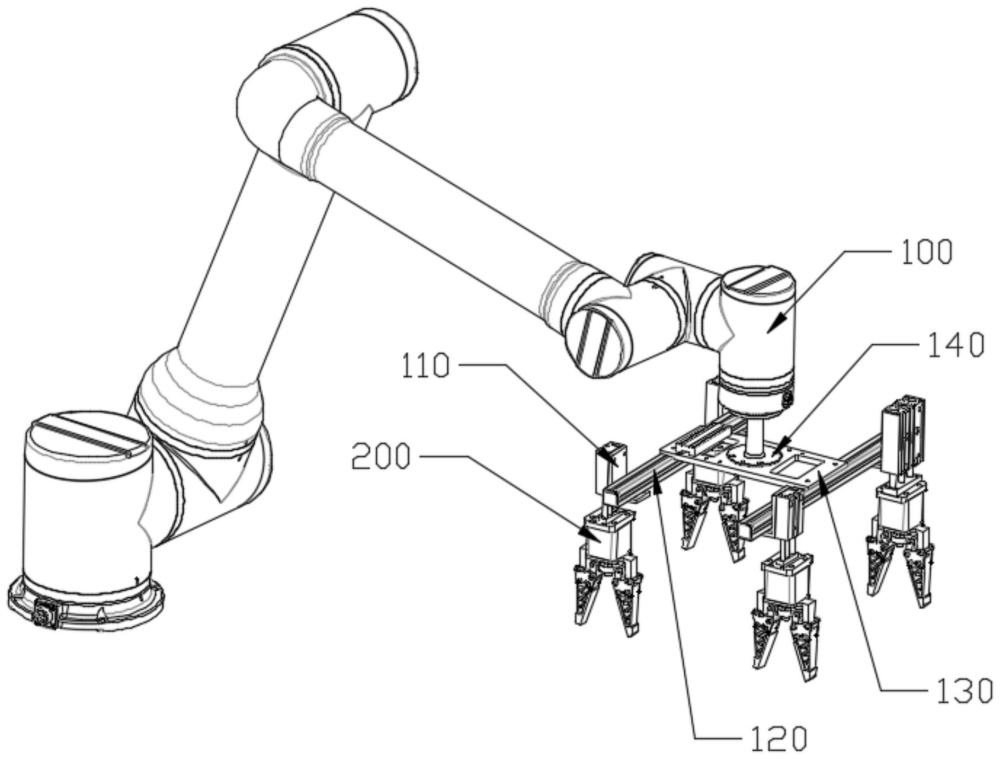
3、一种分拣设备,包括控制器、机械手、至少两个夹爪,夹爪包括第一动力件、第二动力件、水平传感器及夹爪本体,第一动力件与所述机械手固定相连,第二动力件活动连接于所述第一动力件的输出端,水平传感器设置于第二动力件上,所述夹爪本体与所述第二动力件相连,所述第二动力件控制所述夹爪本体进行夹紧或松开。所述机械手、水平传感器、所述第一动力件及第二动力件均与所述控制器相连,所述控制器控制所述机械手移动。
4、进一步地,所述第一动力件的输出端设置有球头座、所述第二动力件靠近所述第一动力件的端部设置有球头,所述球头座罩设于所述球头上;所述球头座的内径大于所述球头的外径、且所述球头座的开口小于所述球头的直径。
5、进一步地,所述球头座的侧壁沿所述第一动力件的输出方向开设有通槽,所述球头上设置有适配所述通槽宽度的卡块;其中,当无外力作用于球头时,在所述球头的重力作用下所述卡块脱离所述通槽。
6、进一步地,分拣设备还包括压力传感器,所述压力传感器与所述控制器电连接,所述压力传感器设置于所述球头座或所述球头二者之一上,所述压力传感器与所述第一动力件的输出轴同轴设置。
7、进一步地,所述夹爪本体包括固定架、连杆机构及柔性手指;所述固定架与所述第二动力件固定相连,所述第二动力件的输出轴穿过所述固定架后与所述连杆机构相连;所述柔性手指相对设置有两个,所述连杆机构两端分别活动连接两所述柔性手指靠近内侧的顶面,所述固定架的两端分别活动连接两所述柔性手指靠近外侧的顶面;当第二动力件的输出轴伸出时,两所述柔性手指相靠近,当第二动力件的输出轴回缩时,两所述柔性手指相分离。
8、进一步地,所述连杆机构包括与所述第二动力件的输出轴垂直固定设置的横杆、活动连接于所述横杆的端部的活动杆,所述活动杆的另一端与所述柔性手指靠近内侧的顶面相连;其中,所述活动杆与所述横杆始终呈锐角。
9、进一步地,所述柔性手指包括刚性部及与刚性部相连的仿生部,所述刚性部与所述固定架及所述连杆机构相连;所述仿生部包括胶体以及内置于胶体内的若干指节。
10、进一步地,所述柔性手指的端部及内侧还设置有防滑层或套设有防滑套。
11、进一步地,所述夹爪设置有若个,每一所述夹爪通过连接件与所述机械手相连,若干所述夹爪相对于所述机械手与连接件相连点呈中心对称分布。
12、一种基于瞬时力反馈的分拣轨迹生产方法,应用于上述的分拣设备,包括:
13、控制器控制机械手移动,至夹爪位于待分拣布片上方;
14、第一动力件的输出轴伸出,带动第二动力件及夹爪本体压向待分拣布片;
15、第二动力件控制夹爪本体夹紧待分拣布片;
16、机械手缓慢抬起,带动夹爪本体夹持带分拣布片的四周与底布分离;
17、待分拣布片四周与底布先后脱离过程中,后脱离的方向所对应的底布则对该方向上的夹爪产生一个非竖直方向的作用力,若该作用力大于阈值则致使该夹爪的水平传感器倾斜;
18、该水平传感器将倾斜信号反馈至控制器,控制器控制机械手朝向该作用力的反向移动;
19、直至待分拣布片完全与底布分离,每一水平传感器均回归水平状态。
20、与现有技术相比,本发明技术方案及其有益效果如下:
21、(1)本发明的分拣设备,将第二动力件活动设置于第一动力件的端部,从而在第二动力件控制夹爪本体夹紧待分拣布片后、机械手抬升的过程中,当待分拣布片的边缘与底布不易分开时(后脱离),由于带分拣布片与底布的拉扯会对夹爪产生一个非竖直方向的作用力,若该作用力大于阈值则致使该夹爪的水平传感器倾斜,该水平传感器将倾斜信号反馈至控制器,控制器控制机械手朝向该作用力的反向移动,从而更易使得待分拣布片在该方向上与底布脱离、且不易将底布带起。
22、(2)本发明的带有水平传感器的球头在抓取待分拣布片的过程中,通过卡块卡入通槽,来确保水平传感器无倾斜变化,在机械手抬起,待分拣布片与底布分离过程中,卡块从通槽内脱离,球头处于自由状态,从而在待分拣布片与底布的拉扯中,当某一方向的瞬时力大于预设值并使水平感应器发生倾斜,水平传感器将倾斜信息传送至控制器,控制器控制机械手反向挪动,从而避免了其他时序里,误触发水平传感器倾斜而导致机械手误操作。
23、(3)本发明的基于瞬时力反馈的分拣轨迹生产方法,通过机械手代替人工取料,根据抓取待分拣布片后,基于待分拣布片与底布之间拉扯产生的瞬时力,来自动生成分拣轨迹,通过反方向拖动将待分拣布片分离,改善了以往每次遇到不同的工况,都需要重新示教和编程,从而降低研发成本,提高智能生产水平。
技术特征:1.一种分拣设备,其特征在于,包括:
2.根据权利要求1所述的一种分拣设备,其特征在于,所述第一动力件的输出端设置有球头座、所述第二动力件靠近所述第一动力件的端部设置有球头,所述球头座罩设于所述球头上;所述球头座的内径大于所述球头的外径、且所述球头座的开口小于所述球头的外径。
3.根据权利要求2所述的一种分拣设备,其特征在于,所述球头座的侧壁沿所述第一动力件的输出方向开设有通槽,所述球头上设置有适配所述通槽宽度的卡块;
4.根据权利要求3所述的一种分拣设备,其特征在于,还包括压力传感器,所述压力传感器与所述控制器电连接,所述压力传感器设置于所述球头座或所述球头二者之一上,所述压力传感器与所述第一动力件的输出轴同轴设置。
5.根据权利要求1所述的一种分拣设备,其特征在于,所述夹爪本体包括固定架、连杆机构及柔性手指;所述固定架与所述第二动力件固定相连,所述第二动力件的输出轴穿过所述固定架后与所述连杆机构相连;
6.根据权利要求4所述的一种分拣设备,其特征在于,所述连杆机构包括与所述第二动力件的输出轴垂直固定设置的横杆、活动连接于所述横杆的端部的活动杆,所述活动杆的另一端与所述柔性手指靠近内侧的顶面相连;
7.根据权利要求4所述的一种分拣设备,其特征在于,所述柔性手指包括刚性部及与刚性部相连的仿生部,所述刚性部与所述固定架及所述连杆机构相连;所述仿生部包括胶体以及内置于胶体内的若干指节。
8.根据权利要求4所述的一种分拣设备,其特征在于,所述柔性手指的端部及内侧还设置有防滑层或套设有防滑套。
9.根据权利要求1所述的一种分拣设备,其特征在于,所述夹爪设置有若个,每一所述夹爪通过连接件与所述机械手相连,若干所述夹爪相对于所述机械手与连接件相连点呈中心对称分布。
10.一种基于瞬时力反馈的分拣轨迹生产方法,应用于权利要求1至权9任意一项所述的分拣设备,其特征在于,包括:
技术总结本发明提供了一种分拣设备及基于瞬时力反馈的分拣轨迹生产方法,分拣设备包括包括控制器、与控制器电连接的机械手、设置于机械手上的至少两个夹爪,夹爪通过固定件与机械手相连。夹爪包括与机械手固定相连的第一动力件、与第一动力件相连的第二动力件、设置于第二动力件上的水平传感器及与第二动力件相连的夹爪本体,水平传感器与控制器电连接,用于检测第二动力件的倾斜度并传输至控制器,第二动力件控制夹爪本体进行夹紧或松开。第二动力件活动连接于第一动力件的第一输出轴的端部。根据抓取待分拣布片后,基于待分拣布片与底布之间拉扯产生的瞬时力,来自动生成分拣轨迹,通过反方向拖动将待分拣布片分离,无需重新编程调试,提高了生产效率。技术研发人员:徐志龙,叶火水,陈豪杰,黄夏伟,吴俊毅,夏志华受保护的技术使用者:厦门攸信信息技术有限公司技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240617/51887.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表